ایجاد و آزمایش موتور براشلس
- DIY یا خودتان آن را انجام دهید
در این مقاله می خواهیم در مورد چگونگی ایجاد یک موتور الکتریکی از ابتدا صحبت کنیم: از ایده و اولین نمونه اولیه تا یک موتور تمام عیار که تمام آزمایشات را پشت سر گذاشته است. اگر این مقاله برای شما جالب بود، ما به طور جداگانه جزئیات بیشتری در مورد مراحل کار خود که بیشتر مورد علاقه شما بود را به شما خواهیم گفت.
در تصویر از چپ به راست: روتور، استاتور، مجموعه موتور جزئی، مجموعه موتور
معرفی
موتورهای الکتریکی بیش از 150 سال پیش ظاهر شدند، اما در این مدت طراحی آنها دستخوش تغییرات قابل توجهی نشده است: روتور چرخان، سیم پیچ های استاتور مسی، یاتاقان ها. در طول سال ها، تنها کاهش وزن موتورهای الکتریکی، افزایش راندمان و همچنین در دقت کنترل سرعت وجود داشته است.امروز به لطف توسعه الکترونیک مدرنو ظهور آهنرباهای قدرتمند مبتنی بر فلزات خاکی کمیاب، میتوان موتورهای الکتریکی قدرتمندتر و در عین حال فشردهتر و سبکتر «Brushless» را نسبت به قبل ایجاد کرد. در عین حال، به دلیل سادگی طراحی، قابل اعتمادترین موتورهای الکتریکی هستند که تا کنون ساخته شده اند. ایجاد چنین موتوری در این مقاله مورد بحث قرار خواهد گرفت.
توضیحات موتور
"موتورهای بدون جاروبک" عنصر "برس" را ندارند که همه از جداسازی ابزارهای برقی آشنا هستند و نقش آن انتقال جریان به سیم پیچ روتور چرخان است. در موتورهای بدون جاروبک، جریان به سیمپیچهای یک استاتور غیر متحرک وارد میشود که با ایجاد میدان مغناطیسی متناوب در قطبهای منفرد، روتوری را که آهنرباها به آن متصل شدهاند میچرخاند.اولین چنین موتوری توسط ما بر روی یک چاپگر سه بعدی به عنوان یک آزمایش چاپ شد. به جای صفحات مخصوص ساخته شده از فولاد الکتریکی، برای محفظه روتور و هسته استاتور، که روی آن پیچیده شده است. کویل مسی، ما با استفاده از پلاستیک معمولی. آهنرباهای نئودیمیم با مقطع مستطیلی به روتور متصل شدند. طبیعتاً چنین موتوری توانایی تولید را نداشت حداکثر قدرت. با این حال، این کافی بود تا موتور تا 20 هزار دور در دقیقه بچرخد، پس از آن پلاستیک نتوانست آن را تحمل کند و روتور موتور از هم پاره شد و آهنرباها به اطراف پراکنده شدند. این آزمایش الهام بخش ما برای ایجاد یک موتور تمام عیار بود.
چند نمونه اولیه
با آموختن نظر آماتورها مدل های رادیویی کنترل شده، به عنوان یک کار، موتوری را برای اتومبیل های مسابقه ای با اندازه "540" به عنوان محبوب ترین انتخاب کردیم. این موتور دارای ابعاد 54 میلی متر طول و 36 میلی متر قطر است.
ما روتور موتور جدید را از یک آهنربای نئودیمیم به شکل یک استوانه ساختیم. آهنربا با اپوکسی روی شافتی که از فولاد ابزار ماشینکاری شده در یک مرکز تولید آزمایشی چسبانده شد.

ما استاتور را با لیزر از مجموعه ای از صفحات فولادی ترانسفورماتور به ضخامت 0.5 میلی متر برش دادیم. سپس هر صفحه با دقت با لاک پوشانده شد و سپس استاتور تمام شده از حدود 50 صفحه به هم چسبانده شد. صفحات با لاک پوشانده شدند تا از اتصال کوتاه بین آنها جلوگیری شود و اتلاف انرژی ناشی از جریان های فوکو که ممکن است در استاتور ایجاد شود را از بین ببرند.

محفظه موتور از دو قسمت آلومینیومی به شکل ظرف ساخته شده بود. استاتور به خوبی در محفظه آلومینیومی قرار می گیرد و به خوبی روی دیوارها قرار می گیرد. این طرح فراهم می کند خنک کننده خوبموتور

اندازه گیری عملکرد
برای موفقیت حداکثر ویژگی هااز پیشرفت های آنها، لازم است ارزیابی کافی و اندازه گیری دقیق ویژگی ها انجام شود. برای این منظور یک داینو مخصوص طراحی و مونتاژ کردیم.
عنصر اصلی پایه یک بار سنگین به شکل پوک است. در حین اندازه گیری، موتور این بار را می چرخاند و سرعت زاویهایو شتاب، توان خروجی و گشتاور موتور محاسبه می شود.
برای اندازه گیری سرعت چرخش بار، یک جفت آهنربا روی شفت و یک آهنربا سنسور دیجیتال A3144 بر اساس جلوه هال. البته، اندازه گیری دورها توسط پالس ها مستقیماً از سیم پیچ های موتور امکان پذیر است، زیرا این موتورهمزمان است با این حال، گزینه با سنسور قابل اطمینان تر است و حتی در سرعت های بسیار پایین نیز کار می کند، که در آن پالس ها قابل خواندن نیستند.
علاوه بر چرخش ها، پایه ما قادر به اندازه گیری چندین پارامتر مهم دیگر است:
- جریان تامین (تا 30A) با استفاده از سنسور جریان بر اساس جلوه سالن ACS712.
- ولتاژ تغذیه. به طور مستقیم از طریق ADC میکروکنترلر، از طریق یک تقسیم کننده ولتاژ اندازه گیری می شود.
- دمای داخل/خارج موتور دما با استفاده از مقاومت حرارتی نیمه هادی اندازه گیری می شود.

در نتیجه غرفه ما قابلیت اندازه گیری در هر زمان را دارد ویژگی های زیرموتور:
- مصرف فعلی؛
- ولتاژ مصرفی؛
- مصرف برق؛
- توان خروجی؛
- چرخش شفت؛
- لحظه روی شفت؛
- انرژی از دست رفته در گرما؛
- دمای داخل موتور
یکی از دلایلی که طراحان به موتورهای الکتریکی براشلس علاقه نشان می دهند، نیاز به موتورهای پرسرعت با ابعاد کوچک است. علاوه بر این، این موتورها موقعیت یابی بسیار دقیقی دارند. این طرح دارای یک روتور متحرک و یک استاتور ثابت است. روتور حاوی یک آهنربای دائمی یا چندین آهنربا است که در یک دنباله خاص قرار دارند. استاتور حاوی سیم پیچ هایی است که میدان مغناطیسی ایجاد می کنند.
یک ویژگی دیگر باید ذکر شود - موتورهای الکتریکی بدون جاروبک می توانند دارای آرمیچری باشند که هم در داخل و هم روی آن قرار دارند خارج از. بنابراین، این دو نوع طراحی ممکن است کاربردهای خاصی در زمینه های مختلف داشته باشند. هنگام قرار دادن لنگر در داخل، امکان دستیابی به موارد بسیار زیادی وجود دارد سرعت بالاچرخش، بنابراین چنین موتورهایی در طراحی سیستم خنک کننده بسیار خوب عمل می کنند. اگر یک درایو با روتور خارجی نصب شده باشد، می توان به موقعیت بسیار دقیق و همچنین مقاومت بالا در برابر بار اضافی دست یافت. اغلب، چنین موتورهایی در رباتیک، تجهیزات پزشکی و ماشین ابزار با کنترل برنامه فرکانس استفاده می شوند.
نحوه کار موتورها
برای به حرکت درآوردن روتور یک موتور DC بدون جاروبک، باید از یک میکروکنترلر مخصوص استفاده شود. نمی توان آن را به همان روش همزمان یا همزمان اجرا کرد ماشین ناهمزمان. با استفاده از میکروکنترلر می توان سیم پیچ های موتور را به گونه ای روشن کرد که جهت بردارهای میدان مغناطیسی روی استاتور و آرمیچر متعامد باشد.

به عبارت دیگر، با کمک یک درایور می توان اثر روی روتور را تنظیم کرد. موتور کموتاتور. برای حرکت آرمیچر، باید کموتاسیون صحیح در سیم پیچ های استاتور انجام شود. متأسفانه امکان کنترل چرخش صاف وجود ندارد. اما می توانید خیلی سریع روتور موتور الکتریکی را افزایش دهید.
تفاوت بین موتورهای براش و براشلس
تفاوت اصلی این است که در موتورهای الکتریکی بدون جاروبک برای مدل ها هیچ سیم پیچی روی روتور وجود ندارد. در مورد الکتروموتورهای کموتاتور، روی روتور آنها سیم پیچی وجود دارد. اما آهنرباهای دائمی روی قسمت ثابت موتور نصب می شوند. علاوه بر این، یک کلکتور با طراحی خاص روی روتور نصب شده است که اتصال به آن انجام می شود برس های گرافیتی. با کمک آنها، ولتاژ به سیم پیچ روتور تامین می شود. اصل کار یک موتور الکتریکی بدون جاروبک نیز به طور قابل توجهی متفاوت است.
دستگاه کلکتور چگونه کار می کند؟
برای راه اندازی یک موتور کموتاتور، باید به سیم پیچ میدان که مستقیماً روی آرمیچر قرار دارد، ولتاژ اعمال کنید. در این حالت یک میدان مغناطیسی ثابت تشکیل می شود که با آهنرباهای استاتور تعامل می کند و در نتیجه آرمیچر و کلکتور متصل به آن می چرخند. در این حالت، برق به سیم پیچ بعدی تامین می شود و چرخه تکرار می شود.

سرعت چرخش روتور مستقیماً به شدت میدان مغناطیسی بستگی دارد آخرین ویژگیبه طور مستقیم به ولتاژ بستگی دارد. بنابراین برای افزایش یا کاهش سرعت چرخش باید ولتاژ تغذیه را تغییر داد.
برای اجرای معکوس، فقط باید قطبیت اتصال موتور را تغییر دهید. برای چنین کنترلی، نیازی به استفاده از میکروکنترلرهای خاصی ندارید، می توانید سرعت چرخش را با استفاده از یک مقاومت متغیر معمولی تغییر دهید.
ویژگی های دستگاه های براشلس
اما کنترل موتور الکتریکی بدون جاروبک بدون استفاده از کنترلرهای خاص غیرممکن است. بر این اساس می توان نتیجه گرفت که از این نوع موتورها نمی توان به عنوان ژنراتور استفاده کرد. برای کارایی کنترل، موقعیت روتور را می توان با استفاده از چندین سنسور هال نظارت کرد. با کمک چنین دستگاه های ساده ای می توان عملکرد را به میزان قابل توجهی بهبود بخشید، اما هزینه موتور الکتریکی چندین برابر افزایش می یابد.
راه اندازی موتورهای براشلس

هیچ فایده ای ندارد که خودتان میکروکنترلرها را بسازید بهترین گزینهمعلوم می شود که یک خرید آماده است، البته چینی. اما هنگام انتخاب باید به توصیه های زیر توجه کنید:
- حداکثر جریان مجاز را رعایت کنید. این گزینه قطعا برای شما مفید خواهد بود انواع مختلفعملیات درایو این مشخصه اغلب توسط سازندگان مستقیماً در نام مدل مشخص می شود. به ندرت، مقادیر مشخصه حالتهای اوج نشان داده میشوند که در آن میکروکنترلر نمیتواند برای مدت طولانی کار کند.
- برای کار مداوم، لازم است حداکثر ولتاژ تغذیه را در نظر بگیرید.
- حتماً مقاومت تمام مدارهای داخلی میکروکنترلر را در نظر بگیرید.
- باید در نظر گرفته شود حداکثر تعدادچرخش، که برای عملکرد این میکروکنترلر معمولی است. لطفا توجه داشته باشید که نمی تواند حداکثر سرعت را افزایش دهد، زیرا محدودیت در سطح نرم افزار ایجاد شده است.
- مدل های ارزان دستگاه های میکروکنترلر دارای پالس هایی در محدوده 7...8 کیلوهرتز هستند. نسخه های گران قیمت را می توان دوباره برنامه ریزی کرد و این پارامتر 2-4 برابر افزایش می یابد.
سعی کنید میکروکنترلرها را با توجه به تمام پارامترها انتخاب کنید، زیرا آنها بر قدرتی که موتور الکتریکی می تواند ایجاد کند تأثیر می گذارد.
مدیریت چگونه انجام می شود؟
واحد کنترل الکترونیکی امکان تعویض سیم پیچ درایو را فراهم می کند. برای تعیین لحظه سوئیچینگ، راننده با استفاده از حسگر هال نصب شده روی درایو، موقعیت روتور را کنترل می کند.

اگر چنین وسایلی وجود نداشته باشد، خواندن ولتاژ معکوس ضروری است. در سیم پیچ های استاتور که به آن متصل نیستند تولید می شود این لحظهزمان. کنترلر یک مجموعه سخت افزاری و نرم افزاری است که به شما امکان می دهد تمام تغییرات را نظارت کنید و ترتیب سوئیچینگ را تا حد امکان دقیق تنظیم کنید.
موتورهای سه فاز براشلس
بسیاری از موتورهای الکتریکی بدون جاروبک برای مدل های هواپیما از جریان DC تغذیه می کنند. اما واحدهای سه فازی نیز وجود دارند که مبدل در آنها نصب می شود. اجازه می دهند از ولتاژ DCایجاد تکانه های سه فازی

کار به شرح زیر پیش می رود:
- سیم پیچ "A" پالس هایی با مقدار مثبت دریافت می کند. روی سیم پیچ "B" - با مقدار منفی. در نتیجه، لنگر شروع به حرکت می کند. سنسورها جابجایی را ثبت می کنند و سیگنالی برای انجام سوئیچینگ بعدی به کنترل کننده ارسال می شود.
- سیم پیچ "A" خاموش می شود و یک پالس مثبت به سیم پیچ "C" ارسال می شود. سوئیچینگ سیم پیچ "B" تغییر نمی کند.
- یک پالس مثبت به سیم پیچ "C" و یک پالس منفی به "A" ارسال می شود.
- سپس جفت "A" و "B" وارد عمل می شود. مقادیر پالس منفی مثبت به ترتیب به آنها ارائه می شود.
- سپس پالس مثبت دوباره به سیم پیچ "B" و پالس منفی به "C" می رود.
- در آخرین مرحله سیم پیچ "A" روشن می شود که یک ضربه مثبت به آن دریافت می شود و یک ضربه منفی به C می رود.
و بعد از آن کل چرخه تکرار می شود.
مزایای استفاده

خودت بسازش موتور الکتریکی بدون جاروبکدشوار است و اجرای کنترل میکروکنترلر تقریبا غیرممکن است. بنابراین بهتر است از طرح های صنعتی آماده استفاده کنید. اما مطمئن شوید که مزایایی را که درایو هنگام استفاده از موتورهای الکتریکی بدون برس دریافت می کند در نظر بگیرید:
- اساسا منبع بیشترنسبت به ماشین های جمع کننده
- سطح کارایی بالا.
- قدرت بیشتر از موتورهای کموتاتور است.
- سرعت چرخش بسیار سریعتر افزایش می یابد.
- در حین کار هیچ جرقه ای ایجاد نمی شود، بنابراین می توان از آنها در محیط هایی با خطر آتش سوزی بالا استفاده کرد.
- عملکرد بسیار ساده درایو.
- در حین کار نیازی به استفاده از اجزای اضافی برای خنک سازی نیست.
از معایب می توان به هزینه بسیار بالای آن اشاره کرد، البته اگر قیمت کنترلر را نیز در نظر بگیریم. روشن کردن چنین موتور الکتریکی حتی برای بررسی عملکرد آن برای مدت کوتاهی امکان پذیر نخواهد بود. علاوه بر این، تعمیر چنین موتورهایی به دلیل ویژگی های طراحی آنها بسیار دشوارتر است.
در این مقاله می خواهیم در مورد چگونگی ایجاد یک موتور الکتریکی از ابتدا صحبت کنیم: از ایده و اولین نمونه اولیه تا یک موتور تمام عیار که تمام آزمایشات را پشت سر گذاشته است. اگر این مقاله برای شما جالب بود، ما به طور جداگانه جزئیات بیشتری در مورد مراحل کار خود که بیشتر مورد علاقه شما بود را به شما خواهیم گفت.
در تصویر از چپ به راست: روتور، استاتور، مجموعه موتور جزئی، مجموعه موتور
معرفی
موتورهای الکتریکی بیش از 150 سال پیش ظاهر شدند، اما در این مدت طراحی آنها دستخوش تغییرات قابل توجهی نشده است: روتور چرخان، سیم پیچ های استاتور مسی، یاتاقان ها. در طول سال ها، تنها کاهش وزن موتورهای الکتریکی، افزایش راندمان و همچنین در دقت کنترل سرعت وجود داشته است.امروزه به لطف توسعه الکترونیک مدرن و ظهور آهنرباهای قدرتمند مبتنی بر فلزات خاکی کمیاب، می توان موتورهای الکتریکی قدرتمندتر و در عین حال فشرده و سبک وزن «Brushless» را نسبت به قبل ایجاد کرد. در عین حال، به دلیل سادگی طراحی، قابل اعتمادترین موتورهای الکتریکی هستند که تا کنون ساخته شده اند. ایجاد چنین موتوری در این مقاله مورد بحث قرار خواهد گرفت.
توضیحات موتور
"موتورهای بدون جاروبک" عنصر "برس" را ندارند که همه از جداسازی ابزارهای برقی آشنا هستند و نقش آن انتقال جریان به سیم پیچ روتور چرخان است. در موتورهای بدون جاروبک، جریان به سیمپیچهای یک استاتور غیر متحرک وارد میشود که با ایجاد میدان مغناطیسی متناوب در قطبهای منفرد، روتوری را که آهنرباها به آن متصل شدهاند میچرخاند.اولین چنین موتوری توسط ما بر روی یک چاپگر سه بعدی به عنوان یک آزمایش چاپ شد. به جای صفحات مخصوص ساخته شده از فولاد الکتریکی، از پلاستیک معمولی برای محفظه روتور و هسته استاتور استفاده کردیم که سیم پیچ مسی روی آن پیچیده شده بود. آهنرباهای نئودیمیم با مقطع مستطیلی به روتور متصل شدند. طبیعتاً چنین موتوری قادر به ارائه حداکثر توان نبود. با این حال، این کافی بود تا موتور تا 20 هزار دور در دقیقه بچرخد، پس از آن پلاستیک نتوانست آن را تحمل کند و روتور موتور از هم پاره شد و آهنرباها به اطراف پراکنده شدند. این آزمایش الهام بخش ما برای ایجاد یک موتور تمام عیار بود.
چند نمونه اولیه
با یادگیری نظر طرفداران مدل های رادیویی، به عنوان یک کار، موتوری را برای اتومبیل های مسابقه ای با اندازه "540" به عنوان محبوب ترین انتخاب کردیم. این موتور دارای ابعاد 54 میلی متر طول و 36 میلی متر قطر است.
ما روتور موتور جدید را از یک آهنربای نئودیمیم به شکل یک استوانه ساختیم. آهنربا با اپوکسی روی شافتی که از فولاد ابزار ماشینکاری شده در یک مرکز تولید آزمایشی چسبانده شد.
ما استاتور را با لیزر از مجموعه ای از صفحات فولادی ترانسفورماتور به ضخامت 0.5 میلی متر برش دادیم. سپس هر صفحه با دقت با لاک پوشانده شد و سپس استاتور تمام شده از حدود 50 صفحه به هم چسبانده شد. صفحات با لاک پوشانده شدند تا از اتصال کوتاه بین آنها جلوگیری شود و اتلاف انرژی ناشی از جریان های فوکو که ممکن است در استاتور ایجاد شود را از بین ببرند.
محفظه موتور از دو قسمت آلومینیومی به شکل ظرف ساخته شده بود. استاتور به خوبی در محفظه آلومینیومی قرار می گیرد و به خوبی روی دیوارها قرار می گیرد. این طراحی خنک کننده خوب موتور را تضمین می کند.
اندازه گیری عملکرد
برای دستیابی به حداکثر عملکرد طرح های خود، لازم است ارزیابی کافی و اندازه گیری دقیق عملکرد انجام شود. برای این منظور یک داینو مخصوص طراحی و مونتاژ کردیم.
عنصر اصلی پایه یک بار سنگین به شکل پوک است. در طول اندازه گیری ها، موتور بار داده شده را می چرخد و توان خروجی و گشتاور موتور از روی سرعت و شتاب زاویه ای محاسبه می شود.
برای اندازه گیری سرعت چرخش بار، از یک جفت آهنربا روی شفت و یک سنسور دیجیتال مغناطیسی A3144 بر اساس اثر هال استفاده شده است. البته، اندازه گیری دور توسط پالس ها به طور مستقیم از سیم پیچ های موتور امکان پذیر است، زیرا این موتور سنکرون است. با این حال، گزینه با سنسور قابل اطمینان تر است و حتی در سرعت های بسیار پایین نیز کار می کند، که در آن پالس ها قابل خواندن نیستند.
علاوه بر چرخش ها، پایه ما قادر به اندازه گیری چندین پارامتر مهم دیگر است:
- جریان تامین (تا 30A) با استفاده از سنسور جریان بر اساس جلوه سالن ACS712.
- ولتاژ تغذیه. به طور مستقیم از طریق ADC میکروکنترلر، از طریق یک تقسیم کننده ولتاژ اندازه گیری می شود.
- دمای داخل/خارج موتور دما با استفاده از مقاومت حرارتی نیمه هادی اندازه گیری می شود.
در نتیجه، غرفه ما قادر است مشخصات موتور زیر را در هر زمان اندازه گیری کند:
- مصرف فعلی؛
- ولتاژ مصرفی؛
- مصرف برق؛
- توان خروجی؛
- چرخش شفت؛
- لحظه روی شفت؛
- انرژی از دست رفته در گرما؛
- دمای داخل موتور
احتمالاً از خود پرسیده اید که چگونه چنین موتوری با موتورهای دیگر، به عنوان مثال، با موتورهای موجود در ماشین های حفاری تفاوت دارد. موتورهای نصب شده در دستگاه های نه چندان قدرتمند معمولا جرقه نمی زنند و مانند همان مته که قدرت کمتری نسبت به دستگاه دارد، پر سر و صدا عمل نمی کنند.
موضوع چیه؟ حقیقت این هست که موتور با برس یک موتور برس دار است و موتور بدون برس یک موتور براشلس است. نوع متفاوتی از موتور برای حل مشکلات مختلف - در جایی - مناسب است مناسب تر خواهد بودجمع کننده، اما در جایی می توانید فقط بدون براش نصب کنید.
موتور برس خورده
یک موتور کموتاتور، به عنوان یک قاعده، فقط دو سیم برق دارد، کنترل آن آسان است؛ کافی است ولتاژ منبع تغذیه ثابت یا متناوب را تنظیم کنید و سرعت بر این اساس تغییر می کند. حتی می توانید موتور کموتاتور را با استفاده از یک دیمر ساده کنترل کنید. مزیت اصلی موتور کموتاتور سرعت بالا (ده ها هزار در دقیقه) با گشتاور بالا است.
اصل کار یک موتور کموتاتور بسیار ساده است. در واقع روتور آن مجموعه ای از قاب های مسی در یک مدار مغناطیسی است که به طور متناوب به منبع تغذیه در مجموعه کموتاتور-برس سوئیچ می شوند. استاتور می تواند یا از آهنرباهای دائمی ساخته شود یا با سیم پیچی که از همان منبع روتور تغذیه می کند یا از یک منبع جداگانه تغذیه می کند و گاهی اوقات استاتور و روتور در یک مدار یک سری قرار می گیرند (مانند موتورهای ماشین لباسشویی های اتوماتیک). ).
به هر بخش از سیم پیچ روتور، از طریق مجموعه کموتاتور-برس، به نوبه خود، در طول چرخش روتور، عرضه می شود. برقدر نتیجه، روتور دوباره مغناطیس می شود و قطب های مغناطیسی شمالی و جنوبی را به دست می آورد که به دلیل آن روتور در داخل استاتور می چرخد (قطب های روتور توسط قطب های استاتور به بیرون رانده می شوند، سپس روتور بیشتر مغناطیس می شود و دوباره به بیرون رانده می شود. ). از آنجایی که روتور هر بار توسط بخش دیگری به منبع تغذیه سوئیچ می شود، در حالی که برق به کلکتور تامین می شود، چرخش متوقف نمی شود.
نقطه ضعف اصلی یک موتور کموتاتور

تنظیم سرعت موتور کموتاتور بسیار راحت است، اما زمانی که به اندازه کافی بالا باشد، برس ها خود را احساس می کنند. از آنجایی که برس ها همیشه در تماس نزدیک با کموتاتور هستند، سرعت بالاآنها به سرعت فرسوده می شوند، به مرور زمان به هر طریقی مسدود می شوند و در نهایت شروع به جرقه زدن می کنند.
سایش برس ها و به طور کلی مجموعه کموتاتور-برس منجر به کاهش راندمان موتور کموتاتور می شود. بنابراین، خودم مونتاژ commutator-brush - این است اشکال اصلیموتورهای کموتاتور. امروزه آنها در تلاشند تا موتورهای برس دار را به نفع موتورهای پله ای براشلس کنار بگذارند.
یک موتور براشلس هیچ کموتاتور یا برس ندارد. ساده ترین مثالموتور بدون جاروبک - ناهمزمان موتور سه فازبا روتور نوع قفس سنجاب. نمونه دیگری از موتور براشلس - مدرن تر - استپر موتور با روتور مغناطیسی . سیمپیچهای استاتور یک موتور بدون جاروبک مجدداً مغناطیس میشوند، به طوری که روتور همیشه به دور خود میچرخد و به طور مداوم به این ترتیب میچرخد.

اغلب، موتورهای بدون جاروبک مدرن بر اساس سیگنال هایی که کنترل کننده سرعت موتور از آن ها کار می کند، مجهز به سنسور موقعیت روتور هستند. سیگنال سنسور موقعیت روتور بیش از 100 بار در ثانیه به پردازنده منتقل می شود و در نتیجه موقعیت یابی دقیق روتور و گشتاور بالا ایجاد می شود. البته موتورهای براشلس بدون سنسور موقعیت روتور وجود دارد؛ نمونه بارز آن همان موتور سه فاز ناهمزمان است. موتورهای بدون سنسور موقعیت ارزان تر از سنسور هستند.
مزایای موتورهای براشلس

از آنجایی که طول عمر بلبرینگ های روتور بسیار طولانی است، می توان گفت که موتور براشلس عملاً هیچ قطعه ای ندارد که در طول زمان فرسوده شود و در حین کار نیازی به تعمیر و نگهداری ندارد. اصطکاک در اینجا به حداقل می رسد، مشکل گرمای بیش از حد کموتاتور وجود ندارد و به طور کلی قابلیت اطمینان و راندمان موتورهای براشلس بسیار بالا است.
هیچ برس جرقه ای وجود ندارد، سنسور موقعیت روتور به کنترل دقیق کمک می کند - عملاً هیچ معایبی وجود ندارد، فقط مزایا. آیا این فقط قیمت کیفیت است موتورهای پله ایبالاتر از کلکسیونرها (به علاوه درایور)، اما این در مقایسه با آن چیزی نیست جایگزینی منظمفنر، برس و کموتاتور برای موتورهای کموتاتور.
موتورها در بسیاری از زمینه های فناوری استفاده می شوند. برای اینکه روتور موتور بچرخد، لازم است که چرخش داشته باشد میدان مغناطیسی. در موتورهای DC معمولی این چرخش انجام می شود به صورت مکانیکیبا استفاده از برس هایی که در امتداد کموتاتور حرکت می کنند. در این حالت جرقه ایجاد می شود و علاوه بر این، به دلیل اصطکاک و سایش برس ها، چنین موتورهایی نیاز به نگهداری مداوم دارند.
به لطف توسعه فناوری، تولید میدان مغناطیسی دوار ممکن شده است به صورت الکترونیکیکه در موتورهای جریان مستقیم بدون جاروبک (BLDC) تجسم یافت.
دستگاه و اصل کار
عناصر اصلی BDPT عبارتند از:
- روتور، که روی آن آهنرباهای دائمی نصب شده است.
- استاتور، که سیم پیچ ها روی آن نصب شده است.
- کنترل کننده الکترونیکی.
از نظر طراحی، چنین موتوری می تواند دو نوع باشد:
با آرایش روتور داخلی (داخلی)

با آرایش روتور خارجی (فرارنده)
در حالت اول روتور داخل استاتور می چرخد و در حالت دوم روتور به دور استاتور می چرخد.
موتور نوع Inrunnerدر مواقعی که نیاز به دستیابی است استفاده می شود سرعت بالاچرخش این موتور دارای طراحی استاندارد ساده تری است که امکان استفاده از استاتور ثابت را برای نصب موتور فراهم می کند.
موتور از نوع Outrunnerمناسب برای دریافت لحظه بزرگدر دور پایین. در این حالت موتور با استفاده از یک محور ثابت نصب می شود.
موتور نوع Inrunner- سرعت بالا، گشتاور کم موتور از نوع Outrunner- سرعت کم، گشتاور بالا
تعداد قطب ها در BLDC می تواند متفاوت باشد. با تعداد قطب ها می توان برخی از ویژگی های موتور را قضاوت کرد. به عنوان مثال، موتوری با روتور دارای 2 قطب دارای تعداد دور بیشتر و گشتاور کم است. موتورهای با تعداد قطب افزایش یافته است گشتاور بیشتر، اما تعداد کمتری از انقلاب ها. با تغییر تعداد قطب های روتور می توانید دور موتور را تغییر دهید. بنابراین، با تغییر طراحی موتور، سازنده می تواند انتخاب کند پارامترهای مورد نیازموتور از نظر گشتاور و سرعت.
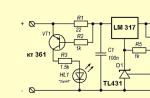
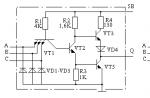
کنترل BDPT

کنترل کننده سرعت، ظاهر
برای رانندگی موتور بدون جارواستفاده شده کنترل کننده ویژه - تنظیم کننده سرعت شفت موتورجریان مستقیم. وظیفه آن تولید و عرضه است لحظه مناسببه سیم پیچ مورد نیاز ولتاژ مورد نیاز. کنترل کننده دستگاه هایی که از شبکه 220 ولت تغذیه می کنند اغلب از یک مدار اینورتر استفاده می کند که در آن جریان با فرکانس 50 هرتز ابتدا به مدار تبدیل می شود. دی سیو سپس به سیگنال های مدوله شده با عرض پالس (PWM). برای تامین ولتاژ سیم پیچ های استاتور، از کلیدهای الکترونیکی قدرتمند در ترانزیستورهای دوقطبی یا سایر عناصر قدرت استفاده می شود.
قدرت و سرعت موتور با تغییر چرخه کاری پالس ها و در نتیجه با مقدار موثر ولتاژ تامین شده به سیم پیچ های استاتور موتور تنظیم می شود.

نمودار شماتیک کنترل کننده سرعت. K1-K6 - کلیدهای D1-D3 - سنسورهای موقعیت روتور (سنسورهای هال)
یک مسئله مهم اتصال به موقع است کلیدهای الکترونیکیبه هر سیم پیچ برای اطمینان از این امر کنترل کننده باید موقعیت روتور و سرعت آن را تعیین کند. برای به دست آوردن چنین اطلاعاتی می توان از حسگرهای نوری یا مغناطیسی استفاده کرد (به عنوان مثال، سنسورهای هال) و همچنین میدان های مغناطیسی معکوس.
استفاده رایج تر سنسورهای هال، که به حضور میدان مغناطیسی واکنش نشان می دهد. سنسورها به گونه ای روی استاتور قرار می گیرند که تحت تأثیر میدان مغناطیسی روتور قرار می گیرند. در برخی موارد، سنسورهایی در دستگاه هایی نصب می شوند که به شما امکان می دهند موقعیت سنسورها را تغییر دهید و بر این اساس زمان بندی را تنظیم کنید.
کنترل کننده های سرعت روتور به شدت جریان عبوری از آن بسیار حساس هستند. اگر انتخاب کنید باتری قابل شارژبا خروجی جریان بالاتر، رگولاتور خواهد سوخت! ترکیب مناسبی از ویژگی ها را انتخاب کنید!
مزایا و معایب
در مقایسه با موتورهای معمولی BLDCها دارای مزایای زیر هستند:
- بازدهی بالا;
- عملکرد بالا;
- امکان تغییر سرعت چرخش;
- بدون برس جرقه زنی;
- صداهای کوچک، هم در محدوده صدا و هم در محدوده فرکانس بالا.
- قابلیت اطمینان;
- توانایی مقاومت در برابر اضافه بارهای گشتاور;
- عالی نسبت ابعاد و قدرت.
موتور براشلس کارایی بالایی دارد. می تواند به 93-95٪ برسد.
قابلیت اطمینان بالای بخش مکانیکی BD با استفاده از بلبرینگ و بدون برس توضیح داده می شود. مغناطیس زدایی آهنرباهای دائمی به کندی اتفاق می افتد، به خصوص اگر آنها با استفاده از عناصر کمیاب خاکی ساخته شوند. هنگامی که در یک کنترل کننده حفاظت جریان استفاده می شود، عمر مفید این واحد بسیار طولانی است. در حقیقت عمر مفید موتور BLDC را می توان با طول عمر بلبرینگ ها تعیین کرد.
معایب BLDC پیچیدگی سیستم کنترل و هزینه بالا است.
کاربرد
زمینه های کاربرد BDTP به شرح زیر است:
- ایجاد مدل ها;
- دارو;
- صنعت خودرو;
- صنعت نفت و گاز;
- لوازم خانگی;
- تجهیزات نظامی.
 استفاده پایگاه داده مدل های هواپیمامزیت قابل توجهی در قدرت و اندازه فراهم می کند. مقایسه یک موتور کموتاتور معمولی از نوع Speed-400 و یک Astro Flight 020 BDTP از همان کلاس نشان می دهد که موتور نوع اول دارای راندمان 40-60٪ است. کارایی دومموتور در شرایط مشابه می تواند به 95٪ برسد. بنابراین استفاده از پایگاه داده این امکان را فراهم می کند که توان قسمت پاور مدل یا زمان پرواز آن را تقریباً 2 برابر افزایش دهد.
استفاده پایگاه داده مدل های هواپیمامزیت قابل توجهی در قدرت و اندازه فراهم می کند. مقایسه یک موتور کموتاتور معمولی از نوع Speed-400 و یک Astro Flight 020 BDTP از همان کلاس نشان می دهد که موتور نوع اول دارای راندمان 40-60٪ است. کارایی دومموتور در شرایط مشابه می تواند به 95٪ برسد. بنابراین استفاده از پایگاه داده این امکان را فراهم می کند که توان قسمت پاور مدل یا زمان پرواز آن را تقریباً 2 برابر افزایش دهد.
به دلیل صدای کم و عدم حرارت دهی در حین کار، BLDCها در پزشکی به ویژه در دندانپزشکی کاربرد فراوانی دارند.
در خودروها از چنین موتورهایی استفاده می شود بالابر پنجره، برف پاک کن برقی شیشه جلو، واشر چراغ جلو و کنترل برقی بالابر صندلی.
بدون جرقه کموتاتور یا برساجازه می دهد تا از پایگاه های داده به عنوان عناصر قفل دستگاه استفاده شود در صنعت نفت و گاز.
به عنوان نمونه ای از استفاده از پایگاه داده در لوازم خانگیمی توانید توجه داشته باشید ماشین لباسشوییبا درایو مستقیم از LG. این شرکت از RDU نوع Outrunner استفاده می کند. 12 آهنربا روی روتور موتور و 36 سلف روی استاتور وجود دارد که با سیمی به قطر 1 میلی متر روی هسته های ساخته شده از فولاد رسانای مغناطیسی پیچیده می شوند. کویل ها به صورت سری، 12 قطعه در هر فاز به هم متصل می شوند. مقاومت هر فاز 12 اهم است. سنسور هال به عنوان سنسور موقعیت روتور استفاده می شود. روتور موتور به وان ماشین لباسشویی متصل است.
 این موتور به طور گسترده در هارد درایوهای رایانه استفاده می شود که باعث فشرده سازی آنها می شود، در درایوهای CD و DVD و سیستم های خنک کننده برای دستگاه های میکرو الکترونیکی و غیره.
این موتور به طور گسترده در هارد درایوهای رایانه استفاده می شود که باعث فشرده سازی آنها می شود، در درایوهای CD و DVD و سیستم های خنک کننده برای دستگاه های میکرو الکترونیکی و غیره.
موتورهای BLDC بزرگ در کنار BD های توان کوچک و متوسط، به طور فزاینده ای در صنایع سنگین، دریایی و نظامی استفاده می شوند.
DB قدرت بالابرای نیروی دریایی ایالات متحده توسعه یافته است. به عنوان مثال، Powertec یک BDHP 220 کیلوواتی با سرعت 2000 دور در دقیقه توسعه داده است. گشتاور موتور به 1080 نیوتن متر می رسد.
بجز مناطق مشخص شده، DB ها در پروژه های ماشین ابزار، پرس ها، خطوط پردازش پلاستیک و همچنین در انرژی باد و استفاده از انرژی امواج جزر و مدی استفاده می شوند.
مشخصات
مشخصات موتور اصلی:
- قدرت نامی;
- حداکثر قدرت;
- حداکثر جریان;
- بیشترین ولتاژ بهره برداری ;
- حداکثر سرعت، بیشینه سرعت(یا ضریب Kv)؛
- مقاومت سیم پیچ;
- زاویه پیشروی;
- حالت عملیاتی;
- ابعاد کلی و ویژگی های وزنموتور
شاخص اصلی یک موتور، قدرت نامی آن است، یعنی توان تولید شده توسط موتور در یک دوره طولانی کار.
 حداکثر قدرت- این قدرتی است که موتور می تواند برای مدت کوتاهی بدون خرابی ارائه دهد. به عنوان مثال، برای موتور براشلس Astro Flight 020 که در بالا ذکر شد، 250 وات است.
حداکثر قدرت- این قدرتی است که موتور می تواند برای مدت کوتاهی بدون خرابی ارائه دهد. به عنوان مثال، برای موتور براشلس Astro Flight 020 که در بالا ذکر شد، 250 وات است.
حداکثر جریان. برای Astro Flight 020 25 A است.
حداکثر ولتاژ کاری– ولتاژی که سیم پیچ های موتور می توانند تحمل کنند. برای Astro Flight 020، محدوده ولتاژ کاری بین 6 تا 12 ولت تنظیم شده است.
حداکثر دور موتور. گاهی اوقات پاسپورت ضریب Kv را نشان می دهد - تعداد دور موتور در هر ولت. برای Astro Flight 020 Kv= 2567 r/V. در این حالت حداکثر سرعت را می توان با ضرب این ضریب در حداکثر ولتاژ کاری تعیین کرد.
معمولا مقاومت سیم پیچبرای موتورها دهم یا هزارم اهم است. برای Astro Flight 020 R= 0.07 Ohm. این مقاومت بر راندمان موتور BLDC تأثیر می گذارد.
زاویه پیشروینشان دهنده پیشرفت ولتاژ سوئیچینگ روی سیم پیچ ها است. این با ماهیت القایی مقاومت سیم پیچ همراه است.
حالت کار می تواند بلند مدت یا کوتاه مدت باشد. در حالت طولانی مدت، موتور می تواند برای مدت طولانی کار کند. در عین حال گرمای ایجاد شده توسط آن به طور کامل دفع می شود و بیش از حد گرم نمی شود. موتورها در این حالت کار می کنند، به عنوان مثال، در فن، نوار نقاله یا پله برقی. حالت کوتاه مدت برای وسایلی مانند آسانسور، تیغ برقی استفاده می شود. در این مواقع موتور برای مدت کوتاهی و پس از آن کار می کند برای مدت طولانیدر حال خنک شدن است
برگه اطلاعات موتور ابعاد و وزن آن را نشان می دهد. علاوه بر این، به عنوان مثال، برای موتورهای در نظر گرفته شده برای هواپیماهای مدل، ابعاد فرود و قطر شفت آورده شده است. به طور خاص، ویژگی های زیر برای موتور Astro Flight 020 ارائه شده است:
- طول 1.75 اینچ است.
- قطر 0.98 اینچ است.
- قطر شفت 1/8 اینچ است.
- وزن 2.5 اونس است.
نتیجه گیری:
- در مدلینگ، در انواع مختلف محصولات فنی، در صنعت و فناوری دفاعی از BLDCها استفاده می شود که در آن یک میدان مغناطیسی دوار توسط یک مدار الکترونیکی ایجاد می شود.
- بر اساس طراحی، موتورهای BLDC می توانند دارای آرایش روتور داخلی (inrunner) یا خارجی (outrunner) باشند.
- در مقایسه با سایر موتورهای BLDC، آنها دارای چندین مزیت هستند، که مهمترین آنها عدم وجود برس و جرقه، راندمان بالا و قابلیت اطمینان بالا است.