به منظور ساده کردن عملکرد همه کنترلرها، که کنترل را تسهیل می کند و کنترل رانندگی خودرو را افزایش می دهد، از اتوبوس CAN استفاده می شود. شما می توانید با دستان خود چنین دستگاهی را به دزدگیر خودروی خود متصل کنید.
[پنهان شدن]
اتوبوس CAN چیست و چگونه کار می کند
CAN bus شبکه ای از کنترل کننده ها است. این دستگاه برای ترکیب همه ماژول های کنترل خودرو در یک شبکه کار با یک سیم مشترک استفاده می شود. این دستگاه از یک جفت کابل به نام CAN تشکیل شده است. اطلاعات ارسال شده از طریق کانال ها از یک ماژول به ماژول دیگر به صورت رمزگذاری شده ارسال می شود.
طرحی برای اتصال دستگاه ها به اتوبوس CAN در مرسدس بنز
گذرگاه CAN چه عملکردهایی را می تواند انجام دهد:
- اتصال هر دستگاه و دستگاه به شبکه سواری خودرو؛
- ساده سازی الگوریتم اتصال و عملکرد سیستم های کمکی ماشین؛
- واحد می تواند به طور همزمان داده های دیجیتال را از منابع مختلف دریافت و ارسال کند.
- استفاده از اتوبوس تأثیر میدان های الکترومغناطیسی خارجی را بر عملکرد سیستم های اصلی و کمکی دستگاه کاهش می دهد.
- گذرگاه CAN به شما اجازه می دهد تا روند انتقال اطلاعات به دستگاه ها و اجزای خاص خودرو را تسریع کنید.
این سیستم در چند حالت کار می کند:
- زمینه. همه دستگاه ها غیرفعال هستند، اما برق به اتوبوس تامین می شود. ولتاژ خیلی کم است، بنابراین اتوبوس قادر به تخلیه باتری نخواهد بود.
- حالت راه اندازی. هنگامی که مالک خودرو کلید را وارد قفل کرده و آن را بچرخاند یا دکمه استارت را فشار دهد، دستگاه فعال می شود. گزینه تثبیت برق عرضه شده به کنترلرها و سنسورها فعال است.
- حالت فعال در این حالت داده ها بین تمام کنترلرها و حسگرها رد و بدل می شود. هنگام کار در حالت فعال، پارامتر مصرف انرژی را می توان تا 85 میلی آمپر افزایش داد.
- حالت خواب یا خاموش شدن. هنگامی که واحد برق خاموش می شود، کنترل کننده های KAN کار نمی کنند. هنگامی که حالت خواب روشن می شود، تمام اجزای دستگاه از شبکه داخلی جدا می شوند.
کانال Vialon Sushka در ویدیوی خود در مورد اتوبوس CAN و آنچه باید در مورد عملکرد آن بدانید صحبت کرد.
مزایا و معایب
مزایای اتوبوس CAN چیست:
- نصب آسان دستگاه در ماشین. صاحب خودرو مجبور نیست برای نصب هزینه کند، زیرا این کار می تواند به طور مستقل انجام شود.
- عملکرد دستگاه این دستگاه امکان تبادل سریع اطلاعات بین سیستم ها را به شما می دهد.
- مقاومت در برابر تداخل.
- همه لاستیک ها دارای سیستم کنترل چند سطحی هستند. استفاده از آن باعث می شود تا از بروز خطا در هنگام ارسال و دریافت داده ها جلوگیری شود.
- در حین کار، اتوبوس به طور خودکار سرعت را در کانال های مختلف توزیع می کند. این امر عملکرد بهینه همه سیستم ها را تضمین می کند.
- امنیت بالای دستگاه؛ در صورت لزوم، سیستم دسترسی غیرمجاز را مسدود می کند.
- انتخاب بزرگی از دستگاه ها در انواع مختلف از تولید کنندگان مختلف. شما می توانید یک گزینه طراحی شده برای یک مدل ماشین خاص را انتخاب کنید.
چه معایبی برای دستگاه معمولی است:
- دستگاه ها محدودیت هایی در میزان انتقال داده دارند. خودروهای مدرن از وسایل الکترونیکی زیادی استفاده می کنند. تعداد زیاد آنها منجر به ازدحام بالای کانال انتقال اطلاعات می شود. این باعث افزایش زمان پاسخ می شود.
- بیشتر داده های ارسال شده در اتوبوس دارای هدف خاصی هستند. بخش کوچکی از ترافیک به اطلاعات مفید اختصاص می یابد.
- هنگام استفاده از پروتکل سطح بالاتر، مالک خودرو ممکن است با مشکل عدم استانداردسازی مواجه شود.
انواع و نشانه گذاری
محبوب ترین نوع لاستیک ها دستگاه هایی هستند که توسط رابرت بوش ساخته شده اند. دستگاه می تواند به صورت متوالی عمل کند، یعنی سیگنال پس از سیگنال ارسال می شود. چنین دستگاه هایی Serial BUS نامیده می شوند. اتوبوس های موازی اتوبوس را نیز می توان در فروش یافت. در آنها، انتقال داده از طریق چندین کانال ارتباطی انجام می شود.
می توانید از ویدیوی فیلمبرداری شده توسط کانال DIYorDIE با انواع، اصل عملکرد و قابلیت های باس CAN آشنا شوید.
با در نظر گرفتن انواع مختلف شناسه ها، چندین نوع دستگاه را می توان تشخیص داد:
- CH2، 0A فعال. به این ترتیب دستگاه هایی که از فرمت تبادل داده 11 بیتی پشتیبانی می کنند علامت گذاری می شوند. این گره ها خطا را در پالس های گره 29 بیتی نشان نمی دهند.
- CH2، 0V فعال. به این ترتیب دستگاه هایی که در قالب 11 بیتی کار می کنند علامت گذاری می شوند. تفاوت اصلی این است که وقتی شناسه 29 بیتی را در سیستم شناسایی می کنند، پیام خطا را به ماژول کنترل گزارش می دهند.
باید در نظر داشت که از این نوع وسایل در خودروهای مدرن استفاده نمی شود. این به این دلیل است که عملکرد سیستم باید منسجم و منطقی باشد. و در این مورد، می تواند با چندین نرخ انتقال پالس - 125 یا 250 کیلوبیت بر ثانیه کار کند. سرعت پایین تر برای کنترل وسایل اضافی مانند چراغ های داخلی، شیشه های برقی، برف پاک کن ها و غیره استفاده می شود. برای اطمینان از وضعیت عملکرد گیربکس، پیشرانه، سیستم ABS و غیره به سرعت بالا نیاز است.
انواع عملکرد اتوبوس
بیایید ببینیم چه عملکردهایی برای دستگاه های مختلف وجود دارد.
دستگاه برای موتور ماشین
هنگام اتصال دستگاه، یک کانال انتقال سریع داده ارائه می شود که از طریق آن اطلاعات با سرعت 500 کیلوبیت بر ثانیه توزیع می شود. هدف اصلی اتوبوس، همگام سازی عملکرد ماژول کنترل، به عنوان مثال، گیربکس و موتور است.
دستگاه نوع Comfort
سرعت انتقال داده از طریق این کانال کمتر و 100 کیلوبیت بر ثانیه است. وظیفه چنین اتوبوسی اتصال تمام دستگاه های متعلق به این کلاس است.
دستگاه اطلاعات و فرمان
سرعت انتقال اطلاعات همانند دستگاه های نوع Comfort است. وظیفه اصلی اتوبوس اطمینان از ارتباط بین گره های سرویس دهنده، به عنوان مثال، یک دستگاه تلفن همراه و یک سیستم ناوبری است.
لاستیک از تولید کنندگان مختلف در عکس نشان داده شده است.
1. دستگاه برای موتورهای احتراق داخلی خودرو 2. تحلیلگر رابط
آیا ممکن است در عملکرد اتوبوس های CAN مشکلاتی وجود داشته باشد؟
در خودروهای مدرن، اتوبوس دیجیتال به طور مداوم استفاده می شود. به طور همزمان با چندین سیستم کار می کند و اطلاعات به طور مداوم از طریق کانال های ارتباطی آن منتقل می شود. با گذشت زمان، دستگاه ممکن است با مشکل مواجه شود. در نتیجه تحلیلگر داده ها به درستی کار نخواهد کرد. در صورت شناسایی مشکلات، مالک خودرو باید علت را پیدا کند.
به چه دلایلی خرابی رخ می دهد:
- آسیب یا شکستگی مدارهای الکتریکی دستگاه؛
- یک اتصال کوتاه در سیستم به باتری یا زمین وجود دارد.
- می تواند سیستم های KAN-Hai یا KAN-Lo را ببندد.
- آسیب به جامپرهای لاستیکی رخ داده است.
- تخلیه باتری یا افت ولتاژ در شبکه داخلی ناشی از عملکرد نادرست دستگاه ژنراتور؛
- سیم پیچ احتراق از کار افتاده است.
هنگام جستجوی دلایل، به خاطر داشته باشید که نقص ممکن است به دلیل عملکرد نادرست دستگاه های کمکی نصب شده اضافی باشد. به عنوان مثال، دلیل ممکن است عملکرد نادرست سیستم ضد سرقت، کنترلرها و دستگاه ها باشد.
شما می توانید در مورد تعمیر اتوبوس داشبورد CAN در فورد فوکوس 2 از ویدئویی که توسط کاربر Brock - Video Corporation ساخته شده است، بیاموزید.
فرآیند عیب یابی به شرح زیر انجام می شود:
- ابتدا مالک خودرو وضعیت سیستم را تشخیص می دهد. توصیه می شود برای شناسایی هر گونه مشکل، یک بررسی کامپیوتری انجام دهید.
- در مرحله بعد، سطح ولتاژ و مقاومت مدارهای الکتریکی تشخیص داده می شود.
- اگر همه چیز مرتب باشد، پارامتر مقاومت جامپرهای لاستیکی بررسی می شود.
تشخیص عملکرد اتوبوس CAN به مهارت و تجربه خاصی نیاز دارد، بنابراین بهتر است مراحل عیب یابی را به متخصصان بسپارید.
نحوه اتصال زنگ هشدار از طریق باس CAN
برای اتصال اتوبوس CAN با دستان خود به سیستم دزدگیر اتومبیل با یا بدون استارت خودکار، باید بدانید که واحد کنترل سیستم ضد سرقت در کجا قرار دارد. اگر نصب آلارم به طور مستقل انجام شود، فرآیند جستجو برای مالک خودرو مشکلی ایجاد نمی کند. ماژول کنترل معمولاً در زیر داشبورد نزدیک فرمان یا پشت صفحه کنترل قرار می گیرد.
نحوه انجام مراحل اتصال:
- سیستم ضد سرقت باید نصب و به تمامی اجزا و المان ها متصل باشد.
- کابل نارنجی ضخیم را پیدا کنید؛ به اتوبوس دیجیتال متصل می شود.
- آداپتور سیستم ضد سرقت به کنتاکت باس پیدا شده متصل است.
- دستگاه در جای امن و مناسب نصب شده است، دستگاه ثابت است. برای جلوگیری از پارگی و نشتی جریان، لازم است تمامی مدارهای الکتریکی عایق بندی شوند. صحت کار تکمیل شده تشخیص داده می شود.
- در مرحله آخر، تمام کانال ها برای اطمینان از وضعیت عملکرد سیستم پیکربندی می شوند. همچنین باید محدوده عملکردی دستگاه را تنظیم کنید.
تعداد سنسورهای نصب شده در مدلهای خودروهای مدرن اغلب به آنها اجازه میدهد که آنها را "رایانههای روی چرخ" نامیده شوند. به منظور سازماندهی مدیریت سیستم های الکترونیکی متعدد، یک اتوبوس CAN ایجاد شد. این که چیست و اصول عملکرد آن چیست، در این مقاله بررسی خواهیم کرد.
مرجع تاریخی
اولین محصولات صنعت خودرو بدون مدار الکتریکی بود. برای راه اندازی موتور خودرو از یک دستگاه مغناطیسی الکتریکی مخصوص برای تولید الکتریسیته از الکتریسیته جنبشی استفاده شد.
با این حال، به تدریج اتومبیل ها به طور فزاینده ای در سیم ها گیر کردند و در سال 1970 با هواپیماها از نظر میزان پر شدن آنها با سنسورهای مختلف رقابت کردند. و هر چه دستگاه های بیشتری در خودرو قرار می گرفت، نیاز به منطقی کردن سیم کشی برق آشکارتر می شد.
حل مشکل با انقلاب ریزپردازنده ممکن شد و در چند مرحله انجام شد:
- در سال 1983، بوش آلمان شروع به توسعه یک پروتکل جدید انتقال داده برای استفاده در صنعت خودرو کرد.
- سه سال بعد، در کنفرانسی در دیترویت، این پروتکل به طور رسمی با نام Controller Area Network یا به اختصار CAN به عموم مردم ارائه شد.
- اجرای عملی اختراع آلمانی توسط شرکت های اینتل و فیلیپس انجام شد. اولین نمونه های اولیه به سال 1987 برمی گردد.
- در سال 1988، BMW سری 8 اولین خودرویی بود که از خط مونتاژ خارج شد که در آن تمام سنسورها با استفاده از فناوری CAN سازماندهی شدند.
- سه سال بعد، بوش استاندارد را به روز کرد و ویژگی های جدیدی را اضافه کرد.
- در سال 1993 استاندارد CAN بین المللی شد و طبقه بندی کننده ISO را دریافت کرد.
- در سال 2001، هر وسیله نقلیه چهار چرخ در اروپا شروع به مجهز شدن به تایر CAN کرد.
- در سال 2012، نسخه جدیدی از اتوبوس منتشر شد: سرعت انتقال اطلاعات افزایش یافت و سازگاری با تعدادی از دستگاه های جدید سازماندهی شد.

CAN bus: اصل عملیات
این اتوبوس فقط از یک جفت سیم متصل به یک میکروچیپ تشکیل شده است. هر کابل چند صد سیگنال را به طور همزمان به کنترل کننده های مختلف خودرو منتقل می کند. سرعت انتقال داده با اینترنت پهن باند قابل مقایسه است. علاوه بر این، در صورت لزوم، سیگنال تا سطح مورد نیاز تقویت می شود.
این فناوری را می توان به چند مرحله تقسیم کرد:
- حالت پس زمینه- تمام اجزای سیستم خاموش هستند، اما ریزتراشه CAN همچنان به دریافت برق ادامه می دهد. سطح مصرف انرژی بسیار کم است و به کسرهای کوچک میلی آمپر می رسد.
- راه اندازی- به محض اینکه راننده کلید احتراق را بچرخاند (یا دکمه "شروع" را فشار دهد تا موتور روشن شود - در برخی از مدل های خودرو)، سیستم به معنای واقعی کلمه "بیدار می شود". حالت تثبیت برق عرضه شده به سنسورها روشن است.
- کار فعال- همه کنترلرها اطلاعات لازم (اعم از تشخیصی و فعلی) را مبادله می کنند. سطح مصرف برق در بارهای اوج به رکورد 85 میلی آمپر افزایش می یابد.
- به خواب رفتن- به محض خاموش شدن موتور خودرو، سنسورهای "KAN" فوراً از کار می افتند. هر یک از گره های سیستم به طور مستقل از شبکه الکتریکی جدا شده و به حالت خواب می رود.

اتوبوس CAN در ماشین چیست؟
CAN در رابطه با یک ماشین را می توان "ستون فقرات" نامید که تمام دستگاه های الکتریکی به آن متصل هستند. سیگنال ها دیجیتال هستند و هادی های هر کنترل کننده به صورت موازی متصل می شوند. با تشکر از این، عملکرد شبکه بالا به دست می آید.
در اتومبیل های مدرن، سنسورهای دستگاه های زیر در یک شبکه واحد ترکیب می شوند:
- موتور؛
- جعبه دنده؛
- ایربگ (ایربگ);
- سیستم ترمز ضد قفل؛
- فرمان برقی؛
- آتش گرفتن؛
- داشبورد؛
- لاستیک (کنترل کننده هایی که سطح فشار را تعیین می کنند)؛
- برف پاک کن روی شیشه جلو؛
- سیستم چند رسانه ای؛
- ناوبری (GLONASS، GPS)؛
- کامپیوتر روی برد.

کاربرد در سایر صنایع
سهولت و سادگی فناوری CAN امکان استفاده از آن را نه تنها برای "اسب های آهنی" باز می کند. تایر در موارد زیر نیز کاربرد دارد:
- تولید دوچرخه. برند ژاپنی Shimano در سال 2009 یک دوچرخه با سیستم کنترل چند سطحی برای مکانیسم تعویض دنده بر اساس CAN معرفی کرد. اثربخشی این مرحله به قدری آشکار بود که سایر شرکت ها، Marantz و Bayon-X تصمیم گرفتند راه شیمانو را دنبال کنند. سازنده دوم از اتوبوس برای سیستم درایو مستقیم استفاده می کند.
- اجرای شناخته شده ای از به اصطلاح "خانه هوشمند" بر اساس اصل اتوبوس CAN وجود دارد. بسیاری از دستگاه هایی که می توانند وظایف خاصی را بدون دخالت انسان حل کنند (آبیاری خودکار چمن در چمن، ترموستات، سیستم نظارت تصویری، کنترل روشنایی، کنترل آب و هوا و غیره) در یک سیستم انتقال داده واحد ترکیب شده اند. درست است، کارشناسان استفاده از فناوری صرفاً خودرو در سکونت انسان را کاملا مشکوک می دانند. از جمله نقاط ضعف این مرحله عدم وجود استاندارد یکپارچه بین المللی CAN برای خانه های هوشمند است.

مزایا و معایب
"KAN-bus" در مهندسی مکانیک برای ویژگی های مثبت زیر ارزشمند است:
- عملکرد: سیستم برای کار تحت فشار زمانی شدید سازگار است.
- سهولت نسبی نصب در دستگاه و هزینه کم کار نصب؛
- افزایش تحمل در برابر تداخل؛
- یک سیستم کنترل چند سطحی که به شما امکان می دهد از بسیاری از خطاها در فرآیند ورود و خروج داده ها جلوگیری کنید.
- دامنه سرعت های عملیاتی به شما امکان می دهد تقریباً با هر موقعیتی سازگار شوید.
- افزایش سطح امنیت: مسدود کردن دسترسی غیرمجاز از خارج.
- انواع استانداردها و همچنین شرکت های تولیدی. طیف وسیعی از لاستیک های موجود در بازار به شما این امکان را می دهد که حتی برای ارزان ترین خودرو نیز گزینه ای پیدا کنید.
با وجود مزایای فراوان، فناوری CAN بدون تعدادی از نقاط ضعف نیست:
- مقدار اطلاعاتی که برای انتقال همزمان در یک "بسته داده" در دسترس است برای نیازهای مدرن کاملاً محدود است.
- بخش قابل توجهی از داده های ارسالی دارای اهداف خدماتی و فنی است. داده های مفید واقعی بخش کوچکی از ترافیک شبکه را تشکیل می دهند.
- پروتکل سطح بالا اصلا استاندارد نیست.
شرکت بوش نه تنها شمع و فیلتر سوخت، بلکه نوعی "اینترنت" برای سنسورهای خودرو به نام اتوبوس CAN را اختراع کرد. این چیه استاندارد در زمینه پیوند دادن همه کنترلرها به یک شبکه عصبی واحد، حدود 30 سال پیش شناخته شد.

ویدئو: نحوه عملکرد یک اتوبوس در ماشین
در این ویدئو، مکانیک آرتور کمالیان به شما می گوید که چرا از کان باس در خودرو استفاده می شود و چگونه به آن متصل شوید:
اتوبوس CAN - مقدمه
پروتکل CAN یک استاندارد ISO (ISO 11898) برای ارتباط سریال است. این پروتکل با هدف استفاده در برنامه های حمل و نقل توسعه داده شد. امروزه CAN فراگیر شده است و در سیستم های اتوماسیون صنعتی و همچنین در حمل و نقل استفاده می شود.
استاندارد CAN از یک لایه فیزیکی و داده تشکیل شده است که چندین نوع مختلف پیام، قوانینی برای حل تداخل دسترسی گذرگاه و محافظت در برابر خطاها را تعریف می کند.
پروتکل CAN
پروتکل CAN در استاندارد ISO 11898-1 توضیح داده شده است و به طور خلاصه می توان آن را به شرح زیر توصیف کرد:
لایه فیزیکی از انتقال داده های دیفرانسیل از طریق جفت پیچ خورده استفاده می کند.
حل تضاد بیتی غیر مخرب برای کنترل دسترسی به گذرگاه استفاده می شود.
پیام ها در اندازه کوچک هستند (عمدتاً 8 بایت داده) و توسط یک جمع کنترل محافظت می شوند.
پیامها آدرسهای واضحی ندارند، در عوض، هر پیام حاوی یک مقدار عددی است که ترتیب آن را در گذرگاه کنترل میکند و همچنین میتواند به عنوان یک شناسه برای محتوای پیام باشد.
یک طرح مدیریت خطا که به خوبی اندیشیده شده است که تضمین می کند پیام ها در صورت عدم دریافت صحیح، مجددا ارسال می شوند.
ابزارهای موثری برای جداسازی خطاها و حذف گره های بد از اتوبوس وجود دارد.
پروتکل های سطح بالاتر
خود پروتکل CAN به سادگی تعریف می کند که چگونه بسته های کوچک داده را می توان به طور ایمن از نقطه A به نقطه B از طریق یک رسانه ارتباطی منتقل کرد. همانطور که انتظار دارید، چیزی در مورد نحوه کنترل جریان نمی گوید. مقدار زیادی از داده را نسبت به یک پیام 8 بایتی منتقل می کند. و نه در مورد آدرس های گره. برقراری ارتباط و غیره این نقاط توسط یک پروتکل لایه بالاتر (پروتکل لایه بالاتر، HLP) تعریف می شوند. اصطلاح HLP از مدل OSI و هفت لایه آن می آید.
پروتکل های سطح بالاتر برای موارد زیر استفاده می شوند:
استانداردسازی روش راه اندازی، از جمله انتخاب سرعت انتقال داده.
توزیع آدرس ها بین گره های تعاملی یا انواع پیام؛
تعاریف نشانه گذاری پیام؛
اطمینان از ترتیب رسیدگی به خطا در سطح سیستم.
گروه های کاربری و غیره
یکی از مؤثرترین راهها برای افزایش صلاحیت CAN، مشارکت در کارهایی است که در گروههای کاربری موجود انجام میشود. حتی اگر قصد ندارید فعالانه شرکت کنید، گروه های کاربری می توانند منبع خوبی از اطلاعات باشند. شرکت در کنفرانس ها یکی دیگر از راه های خوب برای به دست آوردن اطلاعات جامع و دقیق است.
محصولات CAN
در سطح پایین، تمایز اساسی بین دو نوع محصول CAN موجود در بازار آزاد وجود دارد - تراشههای CAN و ابزارهای توسعه CAN. در سطح بالاتر، دو نوع دیگر از محصولات قرار دارند: ماژولهای CAN و ابزار طراحی CAN. طیف گسترده ای از این محصولات امروزه در بازار آزاد موجود است.
ثبت اختراعات CAN
پتنت های مربوط به برنامه های کاربردی CAN می توانند انواع مختلفی داشته باشند: پیاده سازی همزمان سازی و فرکانس ها، انتقال مجموعه داده های بزرگ (پروتکل CAN از فریم های داده ای استفاده می کند که تنها 8 بایت طول دارند) و غیره.
سیستم های کنترل توزیع شده
پروتکل CAN پایه خوبی برای توسعه سیستم های کنترل توزیع شده است. روش حل اختلاف مورد استفاده توسط CAN تضمین می کند که هر گره CAN با پیام هایی که مربوط به آن گره هستند تعامل خواهد داشت.
یک سیستم کنترل توزیع شده را می توان به عنوان سیستمی توصیف کرد که قدرت محاسباتی آن بین تمام گره های سیستم توزیع شده است. گزینه مقابل سیستمی با پردازنده مرکزی و نقاط ورودی/خروجی محلی است.
پیام های CAN
باس CAN یک اتوبوس پخش است. این بدان معنی است که همه گره ها می توانند به همه ارسال ها "گوش دهند". هیچ راهی برای ارسال پیام به یک گره خاص وجود ندارد؛ تمام گره ها بدون استثنا همه پیام ها را دریافت خواهند کرد. با این حال، سختافزار CAN، قابلیتهای فیلتر محلی را فراهم میکند تا هر ماژول فقط بتواند به پیامی که به آن علاقه دارد پاسخ دهد.
آدرس دهی پیام های CAN
CAN از پیام های نسبتا کوتاه استفاده می کند - حداکثر طول فیلد اطلاعات 94 بیت است. پیامها آدرس صریح ندارند، میتوان آنها را آدرسدهی محتوا نامید: محتوای پیام به طور ضمنی (به طور ضمنی) مخاطب را تعیین میکند.
انواع پیام
4 نوع پیام (یا فریم) از طریق گذرگاه CAN منتقل می شود:
چارچوب داده؛
قاب از راه دور؛
قاب خطا؛
قاب اضافه بار.
چارچوب داده
به طور خلاصه: "سلام به همه، داده هایی با علامت X وجود دارد، امیدوارم دوست داشته باشید!"
قاب داده رایج ترین نوع پیام است. این شامل بخش های اصلی زیر است (برخی از جزئیات برای اختصار حذف شده است):
فیلد داوری، که اولویت پیام ها را زمانی که دو یا چند گره برای گذرگاه با هم رقابت می کنند، تعیین می کند. فیلد داوری شامل:
در مورد CAN 2.0A، یک شناسه 11 بیتی و یک بیت، بیت RTR، که برای فریم های داده تعیین کننده است.
در مورد CAN 2.0B، یک شناسه 29 بیتی (که همچنین شامل دو بیت مغلوب: SRR و IDE) و یک بیت RTR است.
فیلد داده که شامل 0 تا 8 بایت داده است.
فیلد CRC حاوی یک جمع کنترلی 15 بیتی است که برای اکثر قسمتهای پیام محاسبه شده است. این چک جمع برای تشخیص خطاها استفاده می شود.
شکاف قدردانی هر کنترل کننده CAN که قادر به دریافت صحیح یک پیام است، یک بیت تصدیق را در انتهای هر پیام ارسال می کند. فرستنده گیرنده وجود یک بیت شناسایی را بررسی می کند و در صورت عدم شناسایی، پیام را دوباره ارسال می کند.
نکته 1: وجود بیت شناسایی در اتوبوس به معنای دریافت پیام هر مقصد مورد نظر نیست. تنها چیزی که مشخص می شود این واقعیت است که پیام به درستی توسط یک یا چند گره اتوبوس دریافت شده است.
نکته 2: شناسه فیلد داوری علی رغم نام آن لزوماً محتویات پیام را مشخص نمی کند.
قاب داده CAN 2.0B ("CAN استاندارد").

قاب داده CAN 2.0B ("CAN توسعه یافته").
قاب حذف شده
به طور خلاصه: "سلام به همه، آیا کسی می تواند داده هایی با برچسب X تولید کند؟"
یک فریم از راه دور بسیار شبیه به یک قاب داده است، اما با دو تفاوت مهم:
به صراحت به عنوان یک فریم حذف شده علامت گذاری شده است (بیت RTR در قسمت داوری مغلوب است) و
فیلد داده وجود ندارد.
هدف اصلی یک فریم راه دور درخواست ارسال یک قاب داده مناسب است. اگر مثلاً، گره A یک فریم راه دور با پارامتر میدان داوری 234 ارسال کند، گره B، اگر به درستی مقداردهی اولیه شود، باید یک قاب داده با پارامتر میدان داوری نیز برابر با 234 ارسال کند.
از فریم های راه دور می توان برای اجرای کنترل ترافیک اتوبوس درخواست-پاسخ استفاده کرد. با این حال، در عمل، قاب از راه دور به ندرت استفاده می شود. این خیلی مهم نیست، زیرا استاندارد CAN دقیقاً همانطور که در اینجا نشان داده شده است نیازی به عملکرد ندارد. اکثر کنترلکنندههای CAN را میتوان طوری برنامهریزی کرد که به طور خودکار به یک فریم از راه دور پاسخ دهند، یا در عوض به پردازنده محلی اطلاع دهند.
یک مشکل در قاب راه دور وجود دارد: کد طول داده باید روی طول پیام پاسخ مورد انتظار تنظیم شود. در غیر این صورت، حل تعارض کارساز نخواهد بود.
گاهی اوقات لازم است که گره ای که به یک قاب راه دور پاسخ می دهد، به محض شناسایی شناسه، انتقال خود را آغاز کند و در نتیجه یک فریم از راه دور خالی را پر کند. این یک مورد متفاوت است.

قاب خطا
به طور خلاصه (همه با هم، با صدای بلند): "اوه عزیز، بیایید یک بار دیگر امتحان کنیم."
Error Frame یک پیام خاص است که قوانین کادربندی پیام CAN را نقض می کند. زمانی ارسال میشود که یک گره شکست را تشخیص دهد و به سایر گرهها کمک میکند تا خرابی را تشخیص دهند - و همچنین فریمهای خطا را ارسال میکنند. فرستنده به طور خودکار سعی می کند پیام را دوباره ارسال کند. یک مدار خطای شمار پیچیده وجود دارد تا اطمینان حاصل شود که یک گره نمی تواند ارتباطات اتوبوس را با ارسال مکرر فریم های خطا مختل کند.
یک قاب خطا حاوی یک پرچم خطا است که شامل 6 بیت با ارزش برابر است (در نتیجه قانون پر کردن بیت را نقض می کند) و یک جداکننده خطا که از 8 بیت مغلوب تشکیل شده است. جداکننده خطا فضایی را فراهم می کند که سایر گره های گذرگاه می توانند پرچم های خطای خود را پس از اینکه خودشان اولین پرچم خطا را تشخیص دهند، ارسال کنند.

قاب اضافه بار
به طور خلاصه: "من یک کوچولوی 82526 بسیار شلوغ هستم، می توانید یک دقیقه صبر کنید؟"
قاب اضافه بار در اینجا فقط برای کامل بودن ذکر شده است. از نظر فرمت بسیار شبیه به یک فریم خطا است و توسط یک گره مشغول ارسال می شود. قاب اضافه بار اغلب استفاده نمی شود زیرا کنترلرهای مدرن CAN به اندازه کافی قدرتمند هستند که از آن استفاده نکنند. در واقع، تنها کنترل کننده ای که فریم های اضافه بار تولید می کند، 82526 منسوخ شده است.
استاندارد و توسعه یافته CAN
استاندارد CAN ابتدا طول شناسه در فیلد داوری را 11 بیت تعیین کرد. بعداً به درخواست مشتریان این استاندارد گسترش یافت. فرمت جدید اغلب Extended CAN (Extended CAN) نامیده می شود، این فرمت اجازه استفاده از حداقل 29 بیت را در شناسه می دهد. یک بیت رزرو شده در قسمت کنترل برای تمایز بین دو نوع فریم استفاده می شود.
به طور رسمی، استانداردها به شرح زیر نامگذاری می شوند -
2.0A - فقط با شناسه های 11 بیتی.
2.0B - نسخه توسعه یافته با شناسه های 29 بیتی یا 11 بیتی (آنها را می توان مخلوط کرد). Node 2.0B می تواند باشد
2.0B فعال (فعال)، یعنی. قادر به ارسال و دریافت فریم های توسعه یافته یا
2.0B منفعل (منفعل)، یعنی. فریم های طولانی دریافت شده را بی سر و صدا دور می اندازد (اما، به زیر مراجعه کنید).
1.x - به مشخصات اصلی و تجدید نظرهای آن اشاره دارد.
امروزه، کنترلرهای جدید CAN معمولاً از نوع 2.0B هستند. یک کنترلر 1.x یا 2.0A اگر پیام هایی با 29 بیت داوری دریافت کند، گیج می شود. کنترلکننده نوع غیرفعال 2.0B آنها را میپذیرد، در صورت صحیح بودن آنها را میشناسد و سپس آنها را بازنشانی میکند. یک کنترل کننده نوع فعال 2.0B می تواند هم چنین پیام هایی را ارسال و هم دریافت کند.
کنترلرهای 2.0B و 2.0A (و همچنین 1.x) سازگار هستند. تا زمانی که کنترلرهای 2.0B از ارسال فریم های توسعه یافته خودداری کنند، می توان از همه آنها در یک اتوبوس استفاده کرد.
گاهی اوقات افراد ادعا می کنند که استاندارد CAN "بهتر" از Enhanced CAN است زیرا در پیام های Enhanced CAN سربار بیشتری وجود دارد. لزوماً اینطور نیست. اگر از فیلد داوری برای انتقال دادهها استفاده میکنید، یک فریم CAN پیشرفته ممکن است دارای سربار کمتری نسبت به فریم استاندارد CAN باشد.
Basic CAN (Basic CAN) و CAN کامل (Full CAN)
عبارت Basic CAN و Full CAN از "کودکی" CAN سرچشمه می گیرد. روزی روزگاری یک کنترلر Intel 82526 CAN وجود داشت که یک رابط به سبک DPRAM را در اختیار برنامه نویس قرار می داد. سپس فیلیپس با 82C200 همراه شد که از مدل برنامه نویسی FIFO و قابلیت های محدود فیلتر استفاده می کرد. برای نشان دادن تفاوت بین دو مدل برنامه نویسی، مردم شروع به نامیدن روش اینتل Full CAN و روش فیلیپس Basic CAN کردند. امروزه اکثر کنترلرهای CAN از هر دو مدل برنامه نویسی پشتیبانی می کنند، بنابراین استفاده از اصطلاحات Full CAN و Basic CAN هیچ فایده ای ندارد - در واقع، این عبارات می توانند باعث سردرگمی شوند و باید از آنها اجتناب شود.
در واقع یک کنترل کننده Full CAN می تواند با یک کنترل کننده Basic CAN ارتباط برقرار کند و بالعکس. هیچ مشکل سازگاری وجود ندارد.
حل اختلاف اتوبوس و اولویت پیام
وضوح اختلاف پیام (فرآیندی که طی آن دو یا چند کنترل کننده CAN تصمیم می گیرند چه کسی از گذرگاه استفاده کند) در تعیین در دسترس بودن واقعی پهنای باند برای انتقال داده بسیار مهم است.
هر کنترل کننده CAN وقتی تشخیص دهد که گذرگاه بیکار است می تواند شروع به ارسال کند. این ممکن است منجر به این شود که دو یا چند کنترل کننده شروع به انتقال یک پیام (تقریبا) به طور همزمان کنند. تعارض به شرح زیر حل می شود. گره های ارسال هنگام ارسال پیام، اتوبوس را زیر نظر دارند. اگر یک گره در حین ارسال یک سطح مغلوب، سطح غالب را تشخیص دهد، بلافاصله از فرآیند حل تعارض خارج می شود و به گیرنده تبدیل می شود. حل برخورد در کل فیلد داوری اتفاق می افتد و پس از ارسال این فیلد، تنها یک فرستنده در اتوبوس باقی می ماند. اگر اتفاقی نیفتد، این گره به انتقال ادامه می دهد. فرستنده های بالقوه باقیمانده سعی می کنند پیام های خود را بعداً، زمانی که اتوبوس آزاد است، منتقل کنند. هیچ زمانی در روند حل تعارض تلف نمی شود.
یک شرط مهم برای حل موفق تضاد، عدم امکان موقعیتی است که در آن دو گره بتوانند یک میدان داوری را انتقال دهند. یک استثنا برای این قانون وجود دارد: اگر پیام حاوی داده نباشد، هر گرهی می تواند این پیام را ارسال کند.
از آنجایی که گذرگاه CAN یک گذرگاه سیمی و و بیت Dominant یک 0 منطقی است، پیامی که کمترین فیلد داوری عددی را داشته باشد، برنده حل تعارض خواهد بود.
سوال: اگر یک گره اتوبوس بخواهد پیامی ارسال کند چه اتفاقی می افتد؟
پاسخ: گره البته در حل تعارض پیروز می شود و پیام را با موفقیت منتقل می کند. اما زمانی که زمان تشخیص فرا می رسد ... هیچ گره ای بیت غالب ناحیه تشخیص را ارسال نمی کند، بنابراین فرستنده یک خطای تشخیص را تشخیص می دهد، یک پرچم خطا ارسال می کند، شمارنده خطای ارسال خود را 8 افزایش می دهد و ارسال مجدد را آغاز می کند. این چرخه 16 بار تکرار می شود، سپس فرستنده به وضعیت خطای غیرفعال می رود. طبق یک قانون خاص در الگوریتم محدود کردن خطا، اگر گره وضعیت خطای غیرفعال داشته باشد و خطا یک خطای تشخیص باشد، مقدار شمارنده خطای انتقال دیگر افزایش نخواهد یافت. بنابراین، گره برای همیشه منتقل می شود تا زمانی که کسی پیام را تشخیص دهد.
آدرس دهی و شناسایی پیام
باز هم، هیچ اشکالی در این واقعیت وجود ندارد که پیام های CAN حاوی آدرس های دقیق نیستند. هر کنترل کننده CAN تمام ترافیک اتوبوس را دریافت می کند و با استفاده از ترکیبی از فیلترهای سخت افزاری و نرم افزار، تعیین می کند که آیا به این پیام "علاقه مند" است یا خیر.
در واقع پروتکل CAN مفهوم آدرس پیام را ندارد. در عوض، محتویات پیام توسط یک شناسه که در جایی از پیام قرار دارد تعیین می شود. پیامهای CAN را میتوان «خطاب به محتوا» نامید.
یک آدرس خاص مانند این کار می کند: "این یک پیام برای گره X است." یک پیام با آدرس محتوا را می توان به صورت زیر توصیف کرد: "این پیام حاوی داده هایی با علامت X است." تفاوت بین این دو مفهوم کوچک اما قابل توجه است.
از محتویات فیلد داوری طبق استاندارد برای تعیین اولویت پیام ها در اتوبوس استفاده می شود. همه کنترلکنندههای CAN همچنین از تمام (تنها بخشی) فیلد داوری بهعنوان کلید در فرآیند فیلتر کردن سختافزار استفاده میکنند.
استاندارد نمی گوید که فیلد داوری لزوماً باید به عنوان شناسه پیام استفاده شود. با این حال، این یک مورد استفاده بسیار رایج است.
نکته ای در مورد مقادیر شناسه
گفتیم که 11 بیت (CAN 2.0A) یا 29 (CAN 2.0B) بیت در دسترس شناسه است. این کاملا درست نیست. برای سازگاری با یک کنترلر CAN قدیمی (حدس بزنید کدام یک؟)، شناسه ها نباید 7 بیت مهم را روی یک منطقی تنظیم کرده باشند، بنابراین شناسه های 11 بیتی دارای 0..2031 مقادیر در دسترس هستند و کاربران شناسه های 29 بیتی می توانند از 532676608 مقادیر مختلف استفاده کنید.
توجه داشته باشید که سایر کنترل کننده های CAN شناسه های "نادرست" را می پذیرند، بنابراین در سیستم های مدرن CAN شناسه های 2032..2047 را می توان بدون محدودیت استفاده کرد.
لایه های فیزیکی CAN
اتوبوس CAN
گذرگاه CAN از یک کد بدون بازگشت به صفر (NRZ) با پر کردن بیت استفاده می کند. دو حالت سیگنال متفاوت وجود دارد: غالب (0 منطقی) و مغلوب (منطقی 1). آنها بسته به لایه فیزیکی استفاده شده با سطوح الکتریکی خاصی مطابقت دارند (چند مورد از آنها وجود دارد). ماژول ها با استفاده از یک طرح سیمی-AND به گذرگاه متصل می شوند: اگر حداقل یک گره گذرگاه را به حالت غالب منتقل کند، کل گذرگاه در این حالت است، صرف نظر از اینکه چند گره یک حالت مغلوب را منتقل می کنند.
سطوح مختلف فیزیکی
لایه فیزیکیسطوح الکتریکی و الگوی انتقال سیگنال اتوبوس، امپدانس کابل و غیره را تعیین می کند.
چندین نسخه مختلف از لایههای فیزیکی وجود دارد: رایجترین آنها نسخه تعریفشده توسط استاندارد CAN، بخشی از ISO 11898-2 است که یک مدار سیگنال متعادل دو سیمه است. گاهی اوقات به آن پرسرعت CAN نیز می گویند.
بخش دیگری از همان استاندارد ISO 11898-3 یک مدار سیگنال متعادل دو سیمه متفاوت را توصیف می کند - برای یک گذرگاه کندتر. تحمل خطا دارد، بنابراین انتقال می تواند ادامه یابد حتی اگر یکی از سیم ها قطع شده باشد، اتصال به زمین یا در حالت Vbat باشد. گاهی اوقات این طرح کم سرعت CAN نامیده می شود.
SAE J2411 یک لایه فیزیکی تک سیم (البته به علاوه زمین) را توصیف می کند. این عمدتا در اتومبیل ها استفاده می شود - به عنوان مثال GM-LAN.
چندین لایه فیزیکی اختصاصی وجود دارد.
در زمان های قدیم، زمانی که درایورهای CAN وجود نداشت، از تغییرات RS485 استفاده می شد.
سطوح مختلف فیزیکی معمولاً نمی توانند با یکدیگر تعامل داشته باشند. برخی از ترکیبها ممکن است در شرایط خوب کار کنند (یا به نظر کار میآیند). برای مثال، فرستندههای پرسرعت و کمسرعت فقط گاهی میتوانند در یک اتوبوس کار کنند.
اکثریت قریب به اتفاق تراشه های فرستنده گیرنده CAN توسط فیلیپس ساخته می شوند. سایر تولیدکنندگان عبارتند از Bosch، Infineon، Siliconix و Unitrode.
رایج ترین فرستنده گیرنده 82C250 است که لایه فیزیکی توصیف شده توسط استاندارد ISO 11898 را پیاده سازی می کند.نسخه بهبود یافته 82C251 است.
یک فرستنده و گیرنده رایج برای "CAN کم سرعت" Philips TJA1054 است.
حداکثر سرعت انتقال داده اتوبوس
حداکثر سرعت انتقال داده از طریق گذرگاه CAN، طبق استاندارد، برابر با 1 مگابیت بر ثانیه است. با این حال، برخی از کنترلرهای CAN از سرعت بالاتر از 1 مگابیت در ثانیه پشتیبانی می کنند و می توانند در برنامه های تخصصی استفاده شوند.
CAN با سرعت پایین (ISO 11898-3، به بالا مراجعه کنید) تا سرعت 125 کیلوبیت بر ثانیه کار می کند.
یک گذرگاه تک سیم CAN در حالت استاندارد می تواند داده ها را با سرعتی در حدود 50 کیلوبیت بر ثانیه و در حالت ویژه با سرعت بالا مثلا برای برنامه نویسی یک ECU حدود 100 کیلوبیت بر ثانیه انتقال دهد.
حداقل سرعت انتقال داده اتوبوس
به خاطر داشته باشید که برخی از فرستنده و گیرنده ها به شما اجازه نمی دهند سرعتی زیر یک مقدار مشخص را انتخاب کنید. به عنوان مثال، اگر از 82C250 یا 82C251 استفاده می کنید، می توانید بدون هیچ مشکلی سرعت را روی 10 کیلوبیت بر ثانیه تنظیم کنید، اما اگر از TJA1050 استفاده کنید، نمی توانید سرعت را زیر 50 کیلوبیت بر ثانیه تنظیم کنید. مشخصات را بررسی کنید.
حداکثر طول کابل
با سرعت انتقال داده 1 مگابیت بر ثانیه، حداکثر طول کابل مورد استفاده می تواند حدود 40 متر باشد. این به دلیل الزام مدار وضوح برخورد است که جبهه موج سیگنال باید بتواند به دورترین گره حرکت کند و قبل از خواندن بیت برگردد. به عبارت دیگر طول کابل با سرعت نور محدود می شود. پیشنهادهایی برای افزایش سرعت نور در نظر گرفته شد، اما به دلیل مشکلات بین کهکشانی رد شد.
سایر حداکثر طول کابل (مقادیر تقریبی هستند):
100 متر در 500 کیلوبیت بر ثانیه؛
200 متر در 250 کیلوبیت بر ثانیه؛
500 متر در 125 کیلوبیت بر ثانیه؛
6 کیلومتر با سرعت 10 کیلوبیت بر ثانیه.
اگر از اپتوکوپلرها برای ایجاد ایزولاسیون گالوانیکی استفاده شود، حداکثر طول باس بر این اساس کاهش می یابد. نکته: از اپتوکوپلرهای سریع استفاده کنید و به تأخیر سیگنال دستگاه نگاه کنید، نه حداکثر سرعت داده در مشخصات.
قطع شدن اتوبوس
گذرگاه CAN ISO 11898 باید با پایانه پایان یابد. این امر با نصب یک مقاومت 120 اهم در هر انتهای باس به دست می آید. فسخ دو هدف را دنبال می کند:
1. بازتاب سیگنال در انتهای اتوبوس را حذف کنید.
2. مطمئن شوید که سطوح جریان مستقیم (DC) صحیح را دریافت می کند.
گذرگاه CAN ISO 11898 باید بدون توجه به سرعت آن خاتمه یابد. تکرار می کنم: گذرگاه CAN ISO 11898 باید بدون توجه به سرعت آن خاتمه یابد. برای کارهای آزمایشگاهی، یک ترمیناتور ممکن است کافی باشد. اگر اتوبوس CAN شما حتی در غیاب ترمیناتورها کار می کند، شما به سادگی خوش شانس هستید.
لطفا توجه داشته باشید که سایر سطوح فیزیکیمانند CAN با سرعت کم، باس CAN تک سیم و موارد دیگر، ممکن است به پایانه گذرگاه نیاز داشته باشند یا نباشند. اما گذرگاه CAN پرسرعت ISO 11898 شما همیشه به حداقل یک ترمیناتور نیاز دارد.
کابل
استاندارد ISO 11898 مشخص می کند که امپدانس مشخصه کابل باید اسماً 120 اهم باشد، اما طیف وسیعی از امپدانس های اهم مجاز است.
تعداد کمی از کابل های موجود در بازار امروز این الزامات را برآورده می کنند. احتمال زیادی وجود دارد که دامنه مقادیر مقاومت در آینده گسترش یابد.
ISO 11898 کابل جفت پیچ خورده، محافظ یا بدون محافظ را توصیف می کند. کار بر روی استاندارد کابل تک سیم SAE J2411 در حال انجام است.
مدیر
18702
به منظور درک اصول عملکرد اتوبوس CAN، تصمیم گرفتیم طبق معمول، بر اساس مطالب منابع خارجی، تعدادی مقاله در این زمینه بنویسیم/ترجمه کنیم.
یکی از این منابع، که همانطور که به نظر ما می رسید، کاملاً اصول اتوبوس CAN را به خوبی نشان می دهد، ارائه ویدیویی محصول آموزشی CANBASIC از مهندسی Igendi (http://canbasic.com) بود.
به ارائه محصول جدید CANBASIC، یک سیستم آموزشی (برد) اختصاص داده شده به عملکرد اتوبوس CAN خوش آمدید.
ما با اصول ساخت یک شبکه CAN bus شروع می کنیم. نمودار یک خودرو را با سیستم روشنایی آن نشان می دهد.

سیم کشی معمولی با هر لامپ به طور مستقیم به برخی از سوئیچ ها یا تماس های پدال ترمز نشان داده شده است.

اکنون عملکرد مشابه با استفاده از فناوری CAN bus نشان داده شده است. دستگاه های روشنایی جلو و عقب به ماژول های کنترل متصل می شوند. ماژول های کنترل به صورت موازی با همان سیم های باس متصل می شوند.

این مثال کوچک نشان می دهد که میزان سیم کشی برق کاهش می یابد. علاوه بر این، ماژول های کنترلی می توانند لامپ های سوخته را شناسایی کرده و راننده را در مورد آن مطلع کنند.
ماشین در نمای نشان داده شده شامل چهار ماژول کنترل است و به وضوح ساختار سیستم آموزشی CANBASIC (تخته) را منعکس می کند.

در بالا چهار گره اتوبوس (گره CAN) وجود دارد.
ماژول جلو چراغ های جلو را کنترل می کند.
واحد هشدار کنترل فضای داخلی خودرو را فراهم می کند.
ماژول کنترل اصلی تمام سیستم های خودرو را برای عیب یابی متصل می کند.
مجموعه عقب چراغ های عقب را کنترل می کند.
در برد آموزشی CANBASIC می توانید مسیریابی (موقعیت) سه سیگنال: "Power"، "CAN-Hi" و "ground" را مشاهده کنید که در ماژول کنترل متصل می شوند.

در اکثر خودروها، برای اتصال ماژول کنترل اصلی به رایانه شخصی با استفاده از نرم افزار تشخیصی، به مبدل OBD-USB نیاز دارید.

برد CANBASIC قبلاً حاوی یک مبدل OBD-USB است و می تواند مستقیماً به رایانه شخصی متصل شود.
این برد توسط یک رابط USB تغذیه می شود، بنابراین نیازی به کابل اضافی نیست.

از سیم های باس برای انتقال انواع داده ها استفاده می شود. چگونه کار می کند؟
اتوبوس CAN چگونه کار می کند؟
این داده ها به صورت سریال منتقل می شوند. در اینجا یک مثال است.
مرد با لامپ، فرستنده، می خواهد اطلاعاتی را با تلسکوپ، گیرنده (گیرنده) برای مرد ارسال کند. او می خواهد داده ها را منتقل کند.

برای انجام این کار، آنها توافق کردند که گیرنده هر 10 ثانیه وضعیت لامپ را بررسی کند.

به نظر می رسد این است:



بعد از 80 ثانیه:

اکنون 8 بیت داده با سرعت 0.1 بیت در ثانیه (یعنی 1 بیت در هر 10 ثانیه) منتقل شده است. به این انتقال داده سریال می گویند.

برای استفاده از این رویکرد در یک برنامه خودروسازی، فاصله زمانی از 10 ثانیه به 0.000006 ثانیه کاهش می یابد. برای انتقال اطلاعات با تغییر سطح ولتاژ در گذرگاه داده.

یک اسیلوسکوپ برای اندازه گیری سیگنال های الکتریکی گذرگاه CAN استفاده می شود. دو پد اندازه گیری روی برد CANBASIC به شما امکان اندازه گیری این سیگنال را می دهد.

برای نمایش پیام CAN کامل، وضوح اسیلوسکوپ کاهش می یابد.

در نتیجه، تک بیت های CAN دیگر قابل شناسایی نیستند. برای حل این مشکل، ماژول CANBASIC به یک اسیلوسکوپ ذخیره سازی دیجیتال مجهز شده است.
ماژول CANBASIC را در یک کانکتور USB رایگان قرار می دهیم، پس از آن به طور خودکار شناسایی می شود. نرم افزار CANBASIC را می توان بلافاصله راه اندازی کرد.

می توانید نمای اسیلوسکوپ نرم افزار را با مقادیر بیت ضمیمه مشاهده کنید. رنگ قرمز داده های منتقل شده در مثال قبلی را نشان می دهد.
برای توضیح سایر قسمت های پیام CAN، قاب CAN را رنگ آمیزی کرده و توضیحاتی را به آن پیوست می کنیم.

هر قسمت رنگی پیام CAN مربوط به یک فیلد ورودی با همان رنگ است. ناحیه ای که با رنگ قرمز مشخص شده است حاوی اطلاعات داده های کاربر است که می تواند در قالب بیت، نوک انگشت یا هگزا دسیمال مشخص شود.
ناحیه زرد مقدار داده های کاربر را تعیین می کند. یک شناسه منحصر به فرد را می توان در منطقه سبز تنظیم کرد.
ناحیه آبی به شما امکان می دهد پیام CAN را برای درخواست راه دور تنظیم کنید. این بدان معنی است که پاسخی از یک گره CAN دیگر انتظار می رود. (خود توسعه دهندگان سیستم توصیه می کنند به دلایلی که منجر به اشکالات سیستم می شود از درخواست های راه دور استفاده نکنید، اما در مقاله دیگری مورد بحث قرار خواهد گرفت.)
بسیاری از سیستمهای گذرگاه CAN توسط یک کانال دوم CAN-LO برای انتقال داده، که نسبت به سیگنال CAN-HI معکوس میشود، در برابر تداخل محافظت میشوند (یعنی همان سیگنال فقط با علامت مخالف ارسال میشود).

شش بیت متوالی با سطح یکسان انتهای فریم CAN را مشخص می کند.

به طور تصادفی، سایر قسمت های فریم CAN ممکن است حاوی بیش از پنج بیت متوالی با همان سطح باشد.

برای جلوگیری از این علامت بیت، اگر پنج بیت متوالی از یک سطح ظاهر شود، بیت مخالف در انتهای قاب CAN درج می شود. به این بیت ها بیت های کارکنان (بیت زباله) می گویند. گیرنده های CAN (گیرنده های سیگنال) این بیت ها را نادیده می گیرند.

با استفاده از فیلدهای ورودی می توان تمام داده های یک فریم CAN را مشخص کرد و بنابراین هر پیام CAN را می توان ارسال کرد.
داده های درج شده بلافاصله در قاب CAN به روز می شوند، در این مثال طول داده از یک بایت به 8 بایت تغییر می کند و یک بایت به عقب منتقل می شود.

متن توضیحات نشان می دهد که چراغ راهنما با استفاده از شناسه "2C1" و بیت های داده 0 و 1 کنترل می شود. همه بیت های داده به 0 بازنشانی می شوند.

شناسه به مقدار ""2С1" تنظیم شده است. برای فعال کردن چراغ راهنما، بیت داده باید از 0 تا 1 تنظیم شود.

در حالت داخلی، می توانید کل ماژول را با کلیک ساده ماوس کنترل کنید. داده های CAN به طور خودکار با توجه به عملکرد مورد نظر تنظیم می شود.
چراغ های راهنما را می توان روی کم نور تنظیم کرد تا به عنوان DRL عمل کند. روشنایی با مدولاسیون عرض پالس (PWM) مطابق با قابلیت های فناوری دیود مدرن کنترل می شود.
اکنون می توانیم چراغ های جلو، چراغ های مه شکن، چراغ های ترمز و چراغ های پرتو بالا را فعال کنیم.

هنگامی که نور پایین خاموش می شود، چراغ های مه شکن نیز خاموش می شوند. منطق کنترل سیستم روشنایی CANBASIC با خودروهای فولکس واگن مطابقت دارد. ویژگی های احتراق و "بازگشت به خانه" نیز گنجانده شده است.
با یک گره سیگنال، می توانید سیگنال سنسور را پس از شروع درخواست راه دور بخوانید.
در حالت درخواست از راه دور، دومین فریم CAN دریافت می شود و در زیر فریم CAN ارسال شده نشان داده می شود.

اکنون بایت داده CAN حاوی نتیجه اندازه گیری حسگر است. همانطور که انگشت خود را به سنسور نزدیک می کنید، می توانید مقدار اندازه گیری شده را تغییر دهید.

کلید مکث فریم CAN فعلی را منجمد می کند و امکان تجزیه و تحلیل دقیق را فراهم می کند.
همانطور که قبلا نشان داده شد، قسمت های مختلف قاب CAN را می توان پنهان کرد.

علاوه بر این، پنهان کردن هر بیت در قاب CAN پشتیبانی می شود.
اگر می خواهید از نمایش قاب CAN در اسناد خود مانند برگه تمرین استفاده کنید، این بسیار مفید است.
در این مقاله ما به طور کامل پروتکل CAN را شرح نمی دهیم، بلکه فقط به مواردی توجه می کنیم که باید بدانید و درک کنید تا بتوانید از دستگاه های الکترونیکی با پشتیبانی CAN استفاده یا توسعه دهید.
پروتکل CAN برای صنعت خودروسازی توسعه یافت و متعاقباً به استانداردی در زمینه شبکههای داخلی خودروها، راهآهنها و غیره تبدیل شد. CAN به شما امکان می دهد شبکه هایی با کنترل خطای پیشرفته، سرعت انتقال تا 1 مگابیت بر ثانیه و بسته هایی که حاوی بیش از هشت بایت داده نیستند ایجاد کنید.
پیوند و لایه های فیزیکیمی توان
پروتکل CAN تعریف دقیقی از لایه فیزیکی ندارد، بنابراین برای مثال می توان از جفت پیچ خورده یا فیبر نوری برای انتقال پیام استفاده کرد. در اصل، CAN لایه پیوند داده را پیاده سازی می کند. تشکیل بسته های پیام، محدود کردن انتشار خطاها، تأیید دریافت و داوری را انجام می دهد. البته استانداردهای سطح برنامه رایجی مانند CANopen وجود دارد، اما اگر نیازی به اطمینان از تعامل بین تجهیزات سازنده های مختلف نیست، بهتر است از یک پروتکل داخلی استفاده کنید.
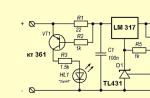
ساختار گره شبکهمی توان
گره شبکه CAN مورد نظر ما شامل یک میکروکنترلر، یک کنترل کننده CAN و یک فرستنده گیرنده است (شکل 1). اغلب ما از میکروکنترلرهایی با یک کنترلر CAN داخلی برای ساده سازی مدار استفاده می کنیم، اما گاهی اوقات از یک کنترل کننده مستقل CAN با رابط SPI (MCP2510) استفاده می شود. سپس فرستنده گیرنده به یک کابل جفت پیچ خورده متصل می شود که در انتهای آن مقاومت های منطبق (ترمیناتور) با مقاومت 120 اهم وجود دارد.
شکل 1 - گره شبکه CAN
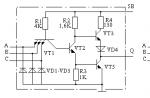
برای تشکیل یک منطقی در یک جفت پیچ خورده یا گذرگاه آزاد، ولتاژی معادل نصف اختلاف ولتاژ بین 0 یا Vcc به هر دو سیم اعمال می شود. صفر منطقی مربوط به اعمال ولتاژ دیفرانسیل به سیم های خط است (شکل 2).

شکل 2 - سطوح منطقی در گذرگاه CAN
گذرگاه CAN به شما امکان می دهد داده ها را با سرعت 1 مگابیت بر ثانیه با طول کابل بیش از 40 متر انتقال دهید. ادبیات آموزشی می گوید که با کاهش سرعت انتقال به 10 کیلو بیت بر ثانیه، می توانید به طول شبکه دست یابید. 1.5 کیلومتر.
بسته پیاممی توان
فرمت پیام CAN در شکل 3 نشان داده شده است.

شکل 3 - بسته پیام CAN
در واقع بسته پیام توسط کنترلر CAN تولید می شود و نرم افزار کاربردی فقط شناسه پیام، طول پیام را تنظیم می کند و بایت های داده را ارائه می کند، بنابراین ما بسته را به طور کامل در نظر نخواهیم گرفت، بلکه به داده هایی که در هنگام تغییر تغییر می دهیم نگاه خواهیم کرد. کار با اتوبوس CAN
شناسه پیام برای شناسایی داده های ارسال شده در این بسته استفاده می شود. هر پیام ارسال شده توسط تمام گره های شبکه دریافت می شود و در این مورد، شناسه به دستگاه خاصی اجازه می دهد تا بفهمد که آیا نیاز به پردازش این پیام دارد یا خیر. حداکثر طول پیام 8 بایت است، اما این مقدار را می توان برای حفظ پهنای باند گذرگاه CAN کاهش داد. به عنوان مثال، در زیر متن چندین اسکرین شات از پیام های CAN از شبکه خودرو وجود دارد.
داوری اتوبوسمی توان
بدون جزئیات بیشتر، پیام با کوچکترین شناسه همیشه ابتدا از طریق گذرگاه CAN مخابره می شود.
تنظیم نرخ باود اتوبوسمی توان
سرعت انتقال داده از طریق گذرگاه CAN از طریق تشکیل برشهای زمانی تنظیم میشود و مانند بسیاری دیگر از پروتکلهای انتقال داده سریال، از طریق تقسیمکننده سرعت تنظیم نمیشود. در اکثر موارد، سرعت های مورد استفاده 10 کیلوبیت بر ثانیه، 20 کیلوبیت بر ثانیه، 50 کیلوبیت بر ثانیه، 100 کیلوبیت بر ثانیه، 125 کیلوبیت بر ثانیه، 500 کیلوبیت بر ثانیه، 800 کیلوبیت بر ثانیه، 1 مگابایت است و تنظیمات این سرعت ها قبلا محاسبه شده است. شکل 4 پنجره انتخاب سرعت را در برنامه PcanView نشان می دهد.

شکل 4 – انتخاب نرخ انتقال داده در برنامه PcanView
همانطور که می بینیم، هنگام تنظیم سرعت استاندارد، تنظیمات به صورت خودکار تنظیم می شوند، اما مواردی وجود دارد که لازم است از سرعت انتقال داده متفاوت استفاده شود. به عنوان مثال، یک CAN روی برد یک ماشین می تواند با سرعت 83 کیلوبیت بر ثانیه کار کند. در این صورت باید تنظیمات را خودتان محاسبه کنید یا به دنبال یک ماشین حساب تخصصی سرعت در اینترنت باشید. برای محاسبه مستقل سرعت، باید بدانید که چند کوانت برای انتقال یک بیت پیام استفاده می شود و فاصله انتقال شامل سه بخش است (شکل 5).

شکل 5 - زمان انتقال یک بیت
قطعه اول همیشه ثابت و برابر با یک کوانتوم است. بعد دو بخش Tseg1 و Tseg2 وجود دارد و تعداد کوانتوم ها در هر بخش توسط کاربر تعیین می شود و می تواند از 8 تا 25 باشد. نقطه نمونه برداری بین Tseg1 و Tseg2 قرار دارد. در پایان بخش اول و در ابتدای بخش دوم. کاربر همچنین می تواند پهنای پرش همگام سازی (SJW) را برای تنظیم نرخ بیت دستگاه گیرنده تعیین کند که می تواند در محدوده 1 تا 4 برش زمانی باشد.
اکنون فرمول محاسبه سرعت را میدهیم (نمونهای از محاسبه سرعت کنترلر SJA1000 CAN):
BTR = Pclk/(BRP * (1 + Tseg1 + Tseg2))
BTR – نرخ انتقال داده،
Pclk – فرکانس کاری کنترلر CAN،
BRP - مقدار پیش مقیاس کننده فرکانس مولد نرخ باود
Tseg1 - بخش اول
Tseg2 - بخش دوم
برای بررسی، اجازه دهید سرعت محاسبه شده از قبل 125 کیلوبیت بر ثانیه را در نظر بگیریم و سعی کنیم تنظیمات را به صورت دستی دریافت کنیم. Pclk 16 مگاهرتز بگیریم.
BRP = 16 مگاهرتز / (125K * (1 + Tseg1 + Tseg2))
سپس یک بازه انتقال بیت را انتخاب می کنیم که در بازه 8 تا 25 برش زمانی باشد تا یک مقدار BRP عدد صحیح بدست آوریم. در مورد ما، اگر (1 + Tseg1 + Tseg2) = 16 را بگیریم، BRP برابر با 30 خواهد بود.
SP = ((1 + Tseg1 + Tseg2) * 70)/100
مقادیر را جایگزین می کنیم و 16 * 0.7 = 11.2 به دست می آوریم که مربوط به رابطه Tseg1 = 10، Tseg2 = 5 است، یعنی. 1 + 10 + 5 = 16. بعد، نگاه کنید اگر Tseg2 >= 5، سپس SJW = 4، اگر Tseg2< 5, то SJW = (Tseg2 – 1). В нашем случае SJW = 4.
در مجموع، برای به دست آوردن سرعت 125 کیلوبیت بر ثانیه، باید در پارامترهای BRP = 30، Tseg1 = 10، Tseg2 = 5، SJW = 4 مشخص کنید.
P.S. پیکربندی نرخ باود بین ماژولهای USB-CAN قدیمی (GW-001 و GW-002) با کنترلر SJA1000 و ماژولهای sysWORXX جدید با کنترلکننده AT91SAM7A3 تفاوت قابلتوجهی دارد. مقاله ای که کار با CAN داخل خودرو را با سرعت 83 کیلوبیت بر ثانیه تشریح می کند، یک محاسبه سرعت برای کنترلر AT91SAM7A3 ارائه می دهد.
نمونه ای از دریافت و انتقال داده ها از طریقرابط CAN
در مثال، ما از یک آداپتور CAN با برنامه PcanView از SYSTEC استفاده می کنیم و به CAN داخلی خودرو که با سرعت 125 کیلوبیت بر ثانیه کار می کند وصل می کنیم. خودروی مورد نظر ما مجهز به صندلی های برقی است و به همین دلیل داده های مربوط به وضعیت صندلی ها را بررسی کرده و با تعویض پکیج با استفاده از کامپیوتر سعی می کنیم وضعیت پشتی را تغییر دهیم.
برای شروع، در نمودار ماشین، راحت ترین کانکتور را با خطوط CANH و CANL پیدا می کنیم و آداپتور خود را به آن وصل می کنیم. اگر کانکتور و سیمها را پیدا نکردید، میتوانید به سمت واحد کنترل صندلی بروید، دو سیم را که در آنجا به هم پیچیده شدهاند پیدا کنید و با دقت سیمها را برش دهید و آداپتور را وصل کنید. اگر پس از اتصال و پیکربندی آداپتور، پیامی دریافت نشد، ابتدا سعی کنید CANH CANL ها را تغییر دهید و بررسی کنید که آیا احتراق روشن است یا خیر.
بعد، برنامه PcanView را اجرا کنید، در پنجره تنظیمات باز شده، Baudrate = 125Kbit/s را تنظیم کنید و روی OK کلیک کنید (شکل 4). در پنجره بعدی، Message filter = Standard را تنظیم کنید، محدوده آدرس را از 000 تا 7FF تنظیم کنید و روی OK کلیک کنید (شکل 6).

شکل 6 - راه اندازی یک فیلتر CAN
اگر همه چیز به درستی انجام شود، پیامهایی را از صندلیها میبینیم (شکل 7) و وقتی دکمه شیب پشتی را روی کنترل پنل فشار میدهیم، پیام دیگری با آدرس 1F4 خواهیم دید که از ریموت به صندلی میرود (شکل 8). ).
شکل 7 - پیام های CAN از یک صندلی برقی

شکل 8 - پیام های CAN از یک صندلی برقی و یک پیام از صفحه کنترل به صندلی
اکنون می دانیم که آدرس، طول و داده در بسته CAN برای شبیه سازی فشار دادن دکمه تغییر موقعیت تکیه گاه باید چقدر باشد. در تب Transmit روی NEW کلیک کنید و در پنجره باز شده یک کپی از بسته 1F4 ایجاد کنید. ID = 1F4، طول = 3، داده = 40 80 00. دوره را می توان 0 ms باقی گذاشت، سپس با فشار دادن دکمه فاصله پیام ها ارسال می شود (شکل 9).
شکل 9 - ایجاد یک پیام CAN
شکل 10 فیلد Transmit پنجره اصلی را نشان می دهد که شامل تمام پیام های ارسال شده به CAN و اطلاعات مربوط به آنها است. هنگامی که یک پیام را برجسته می کنید و دکمه فاصله را فشار می دهید، یک بسته به شبکه CAN ارسال می شود و صندلی کمی در جهت دلخواه حرکت می کند.
واضح است که در این صورت امکان دستیابی به کنترل کامل صندلی وجود نخواهد داشت، زیرا ما نمی توانیم بسته های کنترل پنل کارخانه را از شبکه حذف کنیم، اما این مشکل کاملا قابل حل است.
خط پایین
ما دیدیم که چگونه، با کمی تلاش و مهارت، میتوانید سیستمهای الکترونیکی خود را با استفاده از پروتکل CAN پیشرفته ایجاد کنید و چگونه میتوانید دستگاههای متصل به اتوبوس CAN خودرو را متصل، کاوش و کنترل کنید.