Створення та тестування безколекторного мотора
- DIY або Зроби сам
У цій статті ми хотіли б розповісти про те, як ми з нуля створили електричний мотор: від появи ідеї та першого прототипу до повноцінного мотора, що пройшов усі випробування. Якщо ця стаття здасться вам цікавою, ми окремо, детальніше, розповімо про етапи нашої роботи, що найбільше зацікавили вас.
На зображенні зліва направо: ротор, статор, часткове складання мотора, мотор у зборі
Вступ
Електричні мотори з'явилися більше 150 років тому, проте за цей час їх конструкція не зазнала особливих змін: ротор, що обертається, мідні обмотки статора, підшипники. З роками відбувалося лише зниження ваги електромоторів, збільшення ККД та точності управління швидкістю.Сьогодні, завдяки розвитку сучасної електронікиі появі потужних магнітів на основі рідкісноземельних металів, вдається створювати як ніколи потужні і в той же час компактні та легкі "Бесколекторні" електромотори. При цьому завдяки простоті своєї конструкції вони є найбільш надійними серед будь-коли створених електродвигунів. Про створення такого двигуна і йтиметься в цій статті.
Опис двигуна
У "Бесколекторних моторах" відсутня знайомий всім з розбирання електроінструменту елемент "Щітки", роль яких полягає в передачі струму на обмотку ротора, що обертається. У безколекторних двигунах струм подається на обмотки статора, що не рухається, який, створюючи магнітне поле по черзі на окремих своїх полюсах, розкручує ротор, на якому закріплені магніти.Перший такий двигун був надрукований нами 3D принтері як експеримент. Замість спеціальних пластин з електротехнічної сталі, для корпусу ротора та осердя статора, на який намотувалась мідна котушка, ми використали звичайний пластик. На роторі було закріплено неодимові магніти прямокутного перерізу. Звичайно такий мотор був не здатний видати максимальну потужність. Однак цього вистачило, щоб двигун розкрутився до 20к rpm, після чого пластик не витримав і ротор двигуна розірвало, а магніти розкидало навколо. Цей експеримент спонукав нас створення повноцінного мотора.
Декілька перших прототипів
Дізнавшись думку любителів радіокерованих моделейЯк завдання, ми вибрали мотор для гоночних машинок типорозміру “540”, як найбільш затребуваного. Даний мотор має габарити 54мм у довжину та 36мм у діаметрі.
Ротор нового двигуна ми зробили з єдиного неодимового магніту у формі циліндра. Магніт епоксидкою приклеїли на виточений вал з інструментальної сталі на дослідному виробництві.

Статор ми вирізали лазером із набору пластин трансформаторної сталі товщиною 0.5мм. Кожна пластина потім була ретельно покрита лаком і потім приблизно 50 пластин склеювався готовий статор. Лаком пластини покривалися щоб уникнути замикання між ними та виключити втрати енергії на струмах Фуко, які могли б виникнути у статорі.

Корпус двигуна був виконаний з двох алюмінієвих частин у формі контейнера. Статор щільно входить до алюмінієвого корпусу і добре прилягає до стінок. Така конструкція забезпечує гарне охолодженнядвигуна.

Вимірювання характеристик
Для досягнення максимальних характеристиксвоїх розробок, необхідно проводити адекватну оцінку та точний вимір характеристик. Для цього нами було спроектовано та зібрано спеціальний диностенд.
Основним елементом стенду є важкий вантаж як шайби. Під час вимірювань, мотор розкручує даний вантаж і по кутовий швидкостіта прискоренню розраховуються вихідна потужність та момент мотора.
Для вимірювання швидкості обертання вантажу використовується пара магнітів на валу та магнітний цифровий датчик A3144 на основі ефекту холу. Звичайно, можна було б вимірювати оберти по імпульсах безпосередньо з обмоток двигуна, оскільки даний моторє синхронним. Однак варіант з датчиком є надійнішим і він працюватиме навіть на дуже малих обертах, на яких імпульси будуть нечитані.
Крім обертів, наш стенд здатний вимірювати ще кілька важливих параметрів:
- струм живлення (до 30А) за допомогою датчика струму на основі ефекту холу ACS712;
- напруга живлення. Вимірюється безпосередньо через АЦП мікроконтролера, через дільник напруги;
- температуру всередині/зовні мотора. Температура вимірюється за допомогою напівпровідникового термоопору;

В результаті наш стенд здатний вимірювати у довільний момент часу такі характеристикидвигуна:
- споживаний струм;
- напруга, що споживається;
- споживана потужність;
- Вихідна потужність;
- обороти валу;
- момент на валу;
- потужність, що йде в тепло;
- температура всередині двигуна.
Одна з причин, через яку конструктори цікавляться саме безколекторними електродвигунами — це необхідність у високооборотних моторах з невеликими розмірами. Причому ці двигуни мають дуже точне позиціонування. У конструкції є рухомий ротор та нерухомий статор. На роторі знаходиться один постійний або кілька магніт, розташованих у певній послідовності. На статорі знаходяться котушки, які створюють магнітне поле.
Потрібно відзначити ще одну особливість - безколекторні електродвигуни можуть мати якір, розташований як усередині, так і на зовнішній стороні. Отже, два типи конструкції можуть мати певне застосування у різних сферах. При розташуванні якоря всередині виходить добитися дуже високої швидкостіобертання, тому такі мотори дуже добре працюють у конструкціях систем охолодження. У тому випадку, якщо встановлюється привід із зовнішнім розташуванням ротора, можна досягти дуже точного позиціонування, а також високої стійкості до перевантажень. Дуже часто такі мотори використовуються в робототехніці, медичному устаткуванні, верстатах з частотним програмним управлінням.
Як працюють мотори
Для того щоб надати руху ротор безколекторного електродвигуна постійного струму необхідно використовувати спеціальний мікроконтролер. Його не вдасться запустити таким же чином, як синхронну або асинхронну машину. За допомогою мікроконтролера виходить включити обмотки двигуна так, щоб напрям векторів магнітних полів на статорі та якорі були ортогональні.

Іншими словами, за допомогою драйвера виходить регулювати який діє на ротор біс колекторного двигуна. Щоб перемістити якір необхідно здійснити правильну комутацію в статорних обмотках. На жаль, забезпечити плавне керування обертанням не виходить. Проте можна дуже швидко збільшити ротора електродвигуна.
Відмінності колекторних та безколекторних двигунів
Основна відмінність полягає в тому, що на безколекторних електродвигуна для моделей відсутня обмотка на роторі. У випадку колекторних електромоторів, на їх роторах є обмотки. А ось постійні магніти встановлюються на нерухомій частині двигуна. Крім того, на роторі встановлюється спеціальної конструкції колектор, до якого здійснюється підключення графітових щіток. З їхньою допомогою подається напруга на обмотку ротора. Принцип роботи безколекторного електродвигуна також суттєво відрізняється.
Як працює колекторна машина
Щоб запустити колекторний двигун, потрібно подати напругу на обмотку збудження, яка розташована безпосередньо на якорі. При цьому утворюється постійне магнітне поле, яке взаємодіє з магнітами на статорі, внаслідок чого провертаються якір та колектор, закріплений на ньому. У цьому подається харчування наступну обмотку, відбувається повтор циклу.

Швидкість обертання ротора залежить безпосередньо від того, наскільки інтенсивно магнітне поле, а остання характеристиказалежить безпосередньо від величини напруги. Отже, щоб збільшити чи зменшити частоту обертання, необхідно змінити напругу живлення.
Для реалізації реверсу потрібно тільки змінити полярність підключення двигуна. Для такого управління не потрібно використовувати спеціальні мікроконтролери, змінювати частоту обертання за допомогою звичайного змінного резистора.
Особливості безколекторних машин
Але управління безколекторним електродвигуном неможливо без використання спеціальних контролерів. Виходячи з цього, можна зробити висновок, що як генератор мотори такого типу застосовуватися не можуть. Для ефективності керування можна відстежувати положення ротора за допомогою кількох датчиків Холла. За допомогою таких нескладних пристроїв виходить значно покращити характеристики, але вартість електродвигуна збільшиться у кілька разів.
Запуск безколекторних двигунів

Виготовляти мікроконтролери самостійно немає сенсу, набагато найкращим варіантомвиявиться покупка готового, нехай і китайського. Але необхідно дотримуватись наступних рекомендацій при виборі:
- Враховуйте максимально допустиму силу струму. Цей параметр обов'язково стане в нагоді для різних видівроботи приводу. Характеристика часто вказується виробниками у назві моделі. Дуже рідко вказуються значення, характерні пікових режимів, в яких мікроконтролер не може працювати тривалий час.
- Для тривалої роботи необхідно враховувати максимальну величину напруги живлення.
- Обов'язково враховуйте опір усіх внутрішніх ланцюгів мікроконтролера.
- Обов'язково потрібно враховувати максимальна кількістьоборотів, яке притаманно роботи цього микроконтроллера. Зверніть увагу на те, що він не зможе збільшити максимальну частоту обертання, оскільки обмеження зроблено на рівні програмного забезпечення.
- Дешеві моделі мікроконтролерних пристроїв мають імпульси в інтервалі 7...8 кГц. Дорогі екземпляри можна перепрограмувати і цей параметр збільшується в 2-4 рази.
Намагайтеся підбирати мікроконтролери за всіма параметрами, оскільки вони впливають потужність, яку може розвинути електродвигун.
Як здійснюється управління
Електронний блок керування дозволяє провести комутацію обмоток приводу. Для визначення моменту перемикання за допомогою драйвера відстежується положення ротора датчика Холла, встановленому на приводі.

У тому випадку, якщо таких пристроїв немає, необхідно зчитувати зворотну напругу. Воно генерується в котушках статора, які не підключені на Наразічасу. Контролер – це апаратно-програмний комплекс, він дозволяє відстежувати всі зміни та максимально точно задавати порядок комутації.
Трифазні безколекторні електродвигуни
Багато безколекторних електродвигунів для авіамоделей виконується під живлення постійним струмом. Але є і трифазні екземпляри, у яких встановлюються перетворювачі. Вони дозволяють з постійної напругизробити трифазні імпульси.

Робота відбувається так:
- На котушку "А" надходять імпульси із позитивним значенням. На котушку "В" - із негативним значенням. Внаслідок цього якір почне рухатися. Датчики фіксують зміщення та подається сигнал на контролер для здійснення наступної комутації.
- Відбувається відключення котушки "А", причому імпульс позитивного значення надходить на обмотку "С". Комутація обмотки "В" не зазнає змін.
- На котушку "С" трапляється позитивний імпульс, а негативний надходить на "А".
- Потім вступає в роботу пари "А" та "В". Там і подаються позитивні негативні значення імпульсів відповідно.
- Потім позитивний імпульс знову надходить на котушку "В", а негативний на "С".
- На останньому етапі відбувається включення котушки "А", на яку надходить позитивний імпульс і негативний йде до С.
І після цього відбувається повторення всього циклу.
Переваги використання

Виготовити своїми руками безколекторний електродвигунскладно, а реалізувати мікроконтролерне керування практично неможливо. Тому найкраще використовувати готові промислові зразки. Але обов'язково враховуйте переваги, які отримує привід при використанні безколекторних електродвигунів:
- Істотно більший ресурс, ніж у колекторних машин.
- Високий рівень ККД.
- Потужність вища, ніж у колекторних двигунів.
- Швидкість обертання набирається набагато швидше.
- Під час роботи не утворюються іскри, тому їх можна використовувати в умовах високої пожежної небезпеки.
- Дуже проста експлуатація приводу.
- Під час роботи не потрібно використовувати додаткові компоненти для охолодження.
Серед недоліків можна виділити дуже високу вартість, враховуючи ще й ціну контролера. Навіть короткочасно включити для перевірки працездатності такий електродвигун не вдасться. Крім того, ремонтувати такі мотори набагато складніше через їх особливості конструкції.
У цій статті ми хотіли б розповісти про те, як ми з нуля створили електричний мотор: від появи ідеї та першого прототипу до повноцінного мотора, що пройшов усі випробування. Якщо ця стаття здасться вам цікавою, ми окремо, детальніше, розповімо про етапи нашої роботи, що найбільше зацікавили вас.
На зображенні зліва направо: ротор, статор, часткове складання мотора, мотор у зборі
Вступ
Електричні мотори з'явилися більше 150 років тому, проте за цей час їх конструкція не зазнала особливих змін: ротор, що обертається, мідні обмотки статора, підшипники. З роками відбувалося лише зниження ваги електромоторів, збільшення ККД та точності управління швидкістю.Сьогодні, завдяки розвитку сучасної електроніки та появі потужних магнітів на основі рідкісноземельних металів, вдається створювати як ніколи потужні і в той же час компактні та легкі "Бесколекторні" електромотори. При цьому завдяки простоті своєї конструкції вони є найбільш надійними серед будь-коли створених електродвигунів. Про створення такого двигуна і йтиметься в цій статті.
Опис двигуна
У "Бесколекторних моторах" відсутня знайомий всім з розбирання електроінструменту елемент "Щітки", роль яких полягає в передачі струму на обмотку ротора, що обертається. У безколекторних двигунах струм подається на обмотки статора, що не рухається, який, створюючи магнітне поле по черзі на окремих своїх полюсах, розкручує ротор, на якому закріплені магніти.Перший такий двигун був надрукований нами 3D принтері як експеримент. Замість спеціальних пластин з електротехнічної сталі, для корпусу ротора та осердя статора, на який намотувалась мідна котушка, ми використовували звичайний пластик. На роторі було закріплено неодимові магніти прямокутного перерізу. Природно, такий мотор був не здатний видати максимальну потужність. Однак цього вистачило, щоб двигун розкрутився до 20к rpm, після чого пластик не витримав і ротор двигуна розірвало, а магніти розкидало навколо. Цей експеримент спонукав нас створення повноцінного мотора.
Декілька перших прототипів
Дізнавшись думку любителів радіокерованих моделей, як завдання, ми вибрали мотор для гоночних машинок типорозміру "540" як найбільш затребуваного. Даний мотор має габарити 54мм у довжину та 36мм у діаметрі.
Ротор нового двигуна ми зробили з єдиного неодимового магніту у формі циліндра. Магніт епоксидкою приклеїли на виточений вал з інструментальної сталі на дослідному виробництві.
Статор ми вирізали лазером із набору пластин трансформаторної сталі товщиною 0.5мм. Кожна пластина потім була ретельно покрита лаком і потім приблизно 50 пластин склеювався готовий статор. Лаком пластини покривалися щоб уникнути замикання між ними та виключити втрати енергії на струмах Фуко, які могли б виникнути у статорі.
Корпус двигуна був виконаний з двох алюмінієвих частин у формі контейнера. Статор щільно входить до алюмінієвого корпусу і добре прилягає до стінок. Така конструкція забезпечує гарне охолодження двигуна.
Вимірювання характеристик
Для досягнення максимальних характеристик своїх розробок необхідно проводити адекватну оцінку і точне вимірювання характеристик. Для цього нами було спроектовано та зібрано спеціальний диностенд.
Основним елементом стенду є важкий вантаж як шайби. Під час вимірювань, мотор розкручує даний вантаж і за кутовою швидкістю та прискоренням розраховуються вихідна потужність та момент мотора.
Для вимірювання швидкості обертання вантажу використовується пара магнітів на валу та магнітний цифровий датчик A3144 на основі ефекту холу. Звичайно, можна було б вимірювати оберти по імпульсах безпосередньо з обмоток двигуна, оскільки даний двигун є синхронним. Однак варіант з датчиком є надійнішим і він працюватиме навіть на дуже малих обертах, на яких імпульси будуть нечитані.
Крім обертів, наш стенд здатний вимірювати ще кілька важливих параметрів:
- струм живлення (до 30А) за допомогою датчика струму на основі ефекту холу ACS712;
- напруга живлення. Вимірюється безпосередньо через АЦП мікроконтролера, через дільник напруги;
- температуру всередині/зовні мотора. Температура вимірюється за допомогою напівпровідникового термоопору;
В результаті наш стенд здатний вимірювати в довільний момент наступні характеристики мотора:
- споживаний струм;
- напруга, що споживається;
- споживана потужність;
- Вихідна потужність;
- обороти валу;
- момент на валу;
- потужність, що йде в тепло;
- температура всередині двигуна.
Напевно задавалася питанням, чим відрізняється такий двигун від інших двигунів, наприклад від тих, що стоять в свердлильних верстатах. Двигуни, встановлені в не дуже потужних верстатах, зазвичай не іскрять, і працюють вони не так шумно, як той же дриль, що володіє меншою ніж верстат потужністю.
У чому ж справа? Справа в тому що двигун із щітками - це колекторний двигун, а двигун без щіток - безколекторний. Для вирішення різних завдань підійде свій тип двигуна десь краще підійдеколекторний, а десь можна встановити лише безколекторний.
Колекторний двигун
Двигун колекторний має, як правило, всього два дроти живлення, він простий в управлінні, достатньо регулювати постійну або змінну напругу живлення і обороти змінюватимуться відповідно. Керувати колекторним двигуном можна навіть за допомогою нехитрого димера. Головна перевага колекторного двигуна - високі обороти (десятки тисяч за хвилину) при високому моменті, що крутить.
Принцип роботи колекторного двигуна дуже простий. По суті, ротор його є набір мідних рамок в магнітопроводі, які по черзі комутуються до джерела живлення на колекторно-щітковому вузлі. Статор може бути як з постійних магнітів, так і з обмоткою, що живиться від того ж джерела, що і ротор, або від окремого джерела, а іноді статор і ротор включені в єдиний послідовний ланцюг (наприклад двигуни пральних машинок-автоматів).
На кожну з секцій обмотки ротора через колекторно-щітковий вузол, почергово, в процесі обертання ротора, подається. електричний струм, в результаті ротор перемагнічується, набуваючи чітко виражених північних і південних магнітних полюсів, завдяки яким і відбувається обертання ротора всередині статора (полюси ротора виштовхуються полюсами статора, потім ротор далі перемагнічується і знову виштовхується). Оскільки ротор щоразу комутується до джерела живлення черговою секцією, обертання не зупиняється, доки на колектор подається живлення.
Основний недолік колекторного двигуна

Оберти колекторного двигуна дуже зручно регулювати, але коли вони досить високі, щітки даються взнаки. Оскільки щітки постійно щільно прилягають до колектора, на високих оборотахвони швидко зношуються, згодом так чи інакше засмічуються, і зрештою починають іскрити.
Зношування щіток, і взагалі колекторно-щіткового вузла, веде до зниження ефективності колекторного двигуна. Таким чином, сам колекторно-щітковий вузол - це і є головний недолікколекторних двигунів. Сьогодні від колекторних двигунів намагаються відмовлятися на користь безщіткових крокових.
У безколекторного двигуна немає колектора, ні щіток. Найпростіший прикладбезколекторного двигуна - асинхронний трифазний двигунз ротором типу «білизна клітина». Ще один приклад безколекторного двигуна - більш сучасний. кроковий двигун з магнітним ротором . Обмотки статора безколекторного двигуна самі перемагнічуються так, щоб ротор постійно розгортався і таким чином безперервно обертався.

Найчастіше сучасні безколекторні двигуни оснащуються датчиком положення ротора, за сигналами якого працює регулятор швидкості обертання двигуна. Сигнал з датчика положення ротора передається на процесор більше 100 разів на секунду, в результаті виходить точне позиціонування ротора і високий момент, що крутить. Бувають, звичайно, безколекторні двигуни і без датчика положення ротора, яскравий приклад - той же трифазний асинхронний мотор. Мотори без датчика положення коштують дешевше, ніж з датчиком.
Переваги безколекторних двигунів

Оскільки ресурс підшипників ротора вкрай великий, можна сказати, що в безколекторному двигуні практично відсутні деталі, що зношуються з часом, і він взагалі не вимагає обслуговування в процесі експлуатації. Тут зведено до мінімуму тертя, відсутня проблема перегріву колектора, загалом надійність та ефективність безколекторних двигунів дуже високі.
Немає іскристих щіток, датчик положення ротора допоможе зробити управління точним, - недоліків практично немає, одні переваги. Хіба що ціна якісних крокових двигуніввище ніж у колекторних (плюс драйвер), але це ніщо порівняно з регулярною заміноюпружин, щіток та колекторів у колекторних двигунів.
Двигуни використовуються у багатьох галузях техніки. Для того щоб відбувалося обертання ротора двигуна необхідно наявність обертового магнітного поля. У звичайних двигунах постійного струму це обертання здійснюється механічним способомза допомогою щіток, що ковзають колектором. При цьому виникає іскріння, а, крім того, через тертя та знос щіток для таких двигунів необхідне постійне технічне обслуговування.
Завдяки розвитку техніки стало можливим генерувати обертове магнітне поле електронним способомщо було втілено в безколекторних двигунах постійного струму (БДПТ).
Пристрій та принцип дії
Основними елементами БДПТ є:
- ротор, на якому укріплені постійні магніти;
- статор, На якому встановлені обмотки;
- електронний контролер.
За конструкцією такий двигун може бути двох типів:
з внутрішнім розташуванням ротора (inrunner)

із зовнішнім розташуванням ротора (outrunner)
У першому випадку ротор обертається всередині статора, а в другому – ротор обертається довкола статора.
Двигун типу inrunnerвикористовується у тому випадку, коли необхідно отримати великі обертиобертання. Цей двигун має простішу стандартну конструкцію, яка дозволяє використовувати нерухомий статор для кріплення двигуна.
Двигун типу outrunnerпідходить для отримання великого моментупри низьких оборотах. У цьому випадку кріплення двигуна провадиться з використанням нерухомої осі.
Двигун типу inrunner— великі оберти, низький момент, що крутить. Двигун типу outrunner— маленькі оберти, високий момент, що крутить.
Число полюсів у БДПТ може бути різним. За кількістю полюсів можна судити про деякі характеристики двигуна. Наприклад, двигун з ротором, що має 2 полюси, має більше оборотів і малий момент. Двигуни із збільшеною кількістю полюсів мають більший момент, але менше оборотів. Зміною числа полюсів ротора можна змінювати кількість обертів двигуна. Таким чином, змінюючи конструкцію двигуна, виробник може підібрати необхідні параметридвигуна по моменту та числу оборотів.
Управління БДПТ

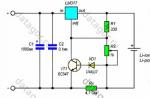
Регулятор обертів, зовнішній вигляд
Для керування безколекторним двигуномвикористовується спеціальний контролер - регулятор швидкості обертання валу двигунапостійного струму. Його завданням є генерація та подача в потрібний моментна необхідну обмотку необхідної напруги. У контролері для приладів з живленням від мережі 220 В найчастіше використовується інверторна схема, в якій відбувається перетворення струму з частотою 50 Гц спочатку постійний струм, а потім сигнали з широтно-імпульсною модуляцією (ШІМ). Для подачі напруги живлення на обмотки статора використовуються потужні електронні ключі на біполярних транзисторах або інших силових елементах.
Регулювання потужності та числа оборотів двигуна здійснюється зміною шпаруватості імпульсів, а, отже, і чинним значенням напруги, що подається на обмотки статора двигуна.

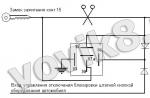
Принципова схема регулятора обертів. К1-К6 - ключі D1-D3 - датчики положення ротора (датчики Холла)
Важливим питанням є своєчасне підключення електронних ключівдо кожної обмотки. Для забезпечення цього контролер повинен визначати положення ротора та його швидкість. Для отримання такої інформації можуть бути використані оптичні або магнітні датчики (наприклад, датчики Холла), і навіть зворотні магнітні поля.
Більш поширене використання датчиків Холла, які реагують на наявність магнітного поля. Датчики розміщуються на статорі таким чином, щоб на них діяло магнітне поле ротора. У деяких випадках датчики встановлюють у пристроях, які дозволяють змінювати положення датчиків і відповідно регулювати кут випередження (timing).
Регулятори обертів ротора дуже чутливі до сили струму, що проходить через нього. Якщо ви підберете акумуляторну батарейкуз більшою силою струму, що видається, то регулятор згорить! Правильно підбирайте поєднання характеристик!
Гідності й недоліки
Порівняно з звичайними двигунамиБДПТ мають такі переваги:
- великий ккд;
- висока швидкодія;
- можливість зміни частоти обертання;
- відсутність іскристих щіток;
- малі шуми, Як у звуковому, так і високочастотному діапазонах;
- надійність;
- здатність протистояти навантаженням по моменту;
- відмінне співвідношення габаритів та потужності.
Безколекторний двигун відрізняється великим ккд. Він може сягати 93-95%.
Висока надійність механічної частини БД пояснюється тим, що в ньому використовуються шарикопідшипники та відсутні щітки. Розмагнічування постійних магнітів відбувається досить повільно, особливо якщо вони виконані з використанням рідкісноземельних елементів. При використанні в контролері захисту струму термін служби цього вузла досить високий. Фактично термін служби БДПТ може визначатися терміном служби шарикопідшипників.
Недоліками БДПТ є складність системи управління та висока вартість.
Застосування
Області застосування БДТП такі:
- створення моделей;
- медицина;
- автомобілебудування;
- нафтогазова промисловість;
- побутові прилади;
- військова техніка.
 Використання БД для авіамоделейдає значну перевагу за потужністю та габаритами. Порівняння звичайного колекторного двигуна типу Speed-400 та БДТП того ж класу Astro Flight 020 показує, що двигун першого типу має ккд 40-60%. ККД другогодвигуна у тих самих умовах може досягати 95%. Таким чином, використання БД дозволяє збільшити майже вдвічі потужність силової частини моделі або час її польоту.
Використання БД для авіамоделейдає значну перевагу за потужністю та габаритами. Порівняння звичайного колекторного двигуна типу Speed-400 та БДТП того ж класу Astro Flight 020 показує, що двигун першого типу має ккд 40-60%. ККД другогодвигуна у тих самих умовах може досягати 95%. Таким чином, використання БД дозволяє збільшити майже вдвічі потужність силової частини моделі або час її польоту.
Завдяки малому шуму та відсутності нагрівання під час роботи БДПТ широко використовуються в медицині, особливо в стоматології.
У автомобілях такі двигуни використовуються в підйомники скла, електросклоочисники, омивачі фар та електрорегулятори підйому крісел.
Відсутність колектора та іскріння щітокдозволяє використовувати БД як елементи запірних пристроїв у нафтогазовій промисловості.
Як приклад використання БД в побутової технікиможна відмітити пральну машинуіз прямим приводом барабана компанії LG. Ця компанія використовує БДТП типу Outrunner. На роторі двигуна є 12 магнітів, а на статорі – 36 котушок індуктивності, які намотані дротом діаметром 1 мм на сердечники з магнітопровідної сталі. Котушки з'єднані послідовно по 12 штук у фазі. Опір кожної фази дорівнює 12 Ом. Як датчик положення ротора використовується датчик Холла. Ротор двигуна кріпиться до бака пральної машини.
 Повсюдно цей двигун використовується в жорстких дисках для комп'ютерів, що робить їх компактними, в CD і DVD приводах і системах охолодження мікро-електронотехнічних пристроїв і не тільки.
Повсюдно цей двигун використовується в жорстких дисках для комп'ютерів, що робить їх компактними, в CD і DVD приводах і системах охолодження мікро-електронотехнічних пристроїв і не тільки.
Поряд з БД малої та середньої потужності в промисловості з важкими умовами роботи, судновій та військовій промисловостях все більше використовуються великі БДПТ.
БД великої потужностірозроблено для американських ВМС. Наприклад, компанія Powertec розробила БДТП потужністю 220 кВт зі швидкістю 2000 об/хв. Момент двигуна сягає 1080 Нм.
Крім зазначених областей, БД застосовуються у проектах верстатів, пресів, ліній для обробки пластмас, а також у вітроенергетиці та використанні енергії приливних хвиль.
Характеристики
Основні характеристики двигуна:
- номінальна потужність;
- максимальна потужність;
- максимальний струм;
- максимальне робоча напруга ;
- максимальні обороти(або коефіцієнт Kv);
- опір обмоток;
- кут випередження;
- режим роботи;
- габаритно-масові характеристикидвигуна.
Основним показником двигуна є його номінальна потужність, тобто потужність, що виробляється двигуном протягом тривалого часу його роботи.
 максимальна потужність- Це потужність, яку може віддати двигун протягом короткочасного відрізка часу, не руйнуючись. Наприклад, для вищезгаданого безколекторного двигуна Astro Flight 020 вона дорівнює 250 Вт.
максимальна потужність- Це потужність, яку може віддати двигун протягом короткочасного відрізка часу, не руйнуючись. Наприклад, для вищезгаданого безколекторного двигуна Astro Flight 020 вона дорівнює 250 Вт.
Максимальний струм. Для Astro Flight 020 він дорівнює 25 А.
Максимальна робоча напруга– напруга, яка може витримати обмотки двигуна. Для Astro Flight 020 заданий діапазон робочої напруги від 6 до 12 Ст.
Максимальна кількість обертів двигуна. Іноді в паспорті вказується коефіцієнт Kv – кількість обертів двигуна однією вольт. Для Astro Flight 020 Kv = 2567 об/В. У цьому випадку максимальну кількість оборотів можна визначити множенням цього коефіцієнта на максимальну робочу напругу.
Зазвичай опір обмотокдля двигунів складає десяті або тисячні частки Ома. Для Astro Flight 020 R = 0,07 Ом. Цей опір впливає на ККД БДПТ.
Кут випередженняє випередження перемикання напруг на обмотках. Воно пов'язані з індуктивним характером опору обмоток.
Режим роботи може бути тривалим чи короткочасним. При довготривалому режимі двигун може працювати тривалий час. При цьому тепло, що виділяється ним, повністю розсіюється і він не перегрівається. У такому режимі працюють двигуни, наприклад, у вентиляторах, конвеєрах чи ескалаторах. Короткочасний режим використовується для таких пристроїв, як ліфт, електробритва. У цих випадках двигун працює короткий час, а потім довгий часостигає.
У паспорті на двигун наводяться його розміри та маса. Крім того, наприклад, для двигунів, призначених для авіамоделей, наводяться посадкові розміри та діаметр валу. Зокрема, для двигуна Astro Flight 020 наведено такі характеристики:
- довжина дорівнює 1,75”;
- діаметр дорівнює 0,98”;
- діаметр валу дорівнює 1/8”;
- вага дорівнює 2,5 унції.
Висновки:
- У моделюванні, у різних технічні вироби, в промисловості та в оборонній техніці використовуються БДПТ, в яких магнітне поле, що обертається, формується електронною схемою.
- За своєю конструкцією БДПТ можуть бути з внутрішнім (inrunner) та зовнішнім (outrunner) розташуванням ротора.
- Порівняно з іншими двигунами БДПТ мають ряд переваг, основними з яких є відсутність щіток та іскріння, великий ккд та висока надійність.