نوسانات الکترومغناطیسی
نوسانات الکتریکی آزاد و اجباری.
ارتعاشات الکترومغناطیسی- نوسانات به هم پیوسته میدان های الکتریکی و مغناطیسی.
نوسانات الکترومغناطیسی در مدارهای الکتریکی مختلف ظاهر می شود. در این حالت، مقدار بار، ولتاژ، قدرت جریان، شدت میدان الکتریکی، القاء نوسان می کند. میدان مغناطیسیو سایر کمیت های الکترودینامیکی
نوسانات الکترومغناطیسی آزاد در سیستم الکترومغناطیسیپس از خارج کردن آن از حالت تعادل، به عنوان مثال، با شارژ خازن یا تغییر جریان در بخش مدار.
این نوسانات میرا هستند، زیرا انرژی ارسال شده به سیستم صرف گرمایش و سایر فرآیندها می شود.
نوسانات الکترومغناطیسی اجباری - نوسانات بدون میرا در مدار ناشی از یک EMF سینوسی خارجی که به طور دوره ای در حال تغییر است.
نوسانات الکترومغناطیسی با قوانینی مشابه با نوسانات مکانیکی توصیف می شوند، اگرچه ماهیت فیزیکی این نوسانات کاملاً متفاوت است.
نوسانات الکتریکی یک مورد خاص از نوسانات الکترومغناطیسی است، زمانی که نوسانات فقط کمیت های الکتریکی در نظر گرفته می شود. در این مورد، آنها در مورد جریان متناوب، ولتاژ، برق و غیره صحبت می کنند.
مدار نوسانی
مدار نوسانی یک مدار الکتریکی است که از یک خازن با ظرفیت C، یک سلف با اندوکتانس L و یک مقاومت با مقاومت R تشکیل شده است که به صورت سری به هم متصل هستند.

حالت تعادل پایدار مدار نوسانی با حداقل انرژی میدان الکتریکی (خازن شارژ نمی شود) و میدان مغناطیسی (جریان از طریق سیم پیچ وجود ندارد) مشخص می شود.
مقادیر بیانگر خصوصیات خود سیستم (پارامترهای سیستم): L و m، 1/C و k
مقادیر مشخص کننده وضعیت سیستم:
مقادیری که میزان تغییر در وضعیت سیستم را بیان می کنند: u = x"(t)و i = q"(t).
ویژگی های نوسانات الکترومغناطیسی
می توان نشان داد که معادله ارتعاشات آزاد برای یک بار است q = q(t)خازن در مدار شکل دارد
جایی که q"دومین مشتق بار نسبت به زمان است. ارزش
فرکانس چرخه ای است. همین معادلات نوسانات جریان، ولتاژ و سایر کمیت های الکتریکی و مغناطیسی را توصیف می کند.
یکی از راه حل های معادله (1) تابع هارمونیک است
دوره نوسان در مدار با فرمول (تامسون) به دست می آید:
![]()
مقدار φ \u003d ώt + φ 0 که تحت علامت سینوس یا کسینوس است، فاز نوسان است.
فاز وضعیت سیستم نوسانی را در هر زمان t تعیین می کند.
جریان در مدار برابر با مشتق بار نسبت به زمان است، می توان آن را بیان کرد
برای بیان واضح تر تغییر فاز، از کسینوس به سینوس حرکت می کنیم
جریان AC ELECTRIC
1. EMF هارمونیک، به عنوان مثال، در یک قاب که با یک ثابت می چرخد رخ می دهد سرعت زاویهایدر یک میدان مغناطیسی یکنواخت با القاء ب. شار مغناطیسی اف، با مساحت قاب نفوذ می کند اس,
زاویه بین نرمال به قاب و بردار القای مغناطیسی کجاست.
طبق قانون القای الکترومغناطیسی فارادی، EMF القایی برابر است با
سرعت تغییر شار القای مغناطیسی کجاست.
یک شار مغناطیسی که به طور هماهنگ متغیر است، یک EMF القایی سینوسی را القا می کند
مقدار دامنه emf القایی کجاست.
2. اگر منبع EMF هارمونیک خارجی را به مدار وصل کنید
سپس نوسانات اجباری در آن رخ می دهد که با فرکانس چرخه ای ώ منطبق با فرکانس منبع رخ می دهد.
در این حالت، نوسانات اجباری یک بار q یعنی اختلاف پتانسیل را ایجاد می کنند تو، قدرت فعلی منو سایر مقادیر فیزیکی این نوسانات بدون میرا هستند، زیرا انرژی از یک منبع به مدار تامین می شود که تلفات را جبران می کند. تغییر هماهنگ جریان، ولتاژ و سایر مقادیر در مدار متغیر نامیده می شود. بدیهی است که اندازه و جهت آنها متفاوت است. جریان ها و ولتاژهایی که فقط از نظر بزرگی متفاوت هستند را ضربان دار می نامند.
در مدارهای AC صنعتی در روسیه، فرکانس 50 هرتز اتخاذ شده است.
برای محاسبه مقدار گرمای Q آزاد شده در هنگام عبور جریان متناوب از هادی با مقاومت فعال R، نمی توان از حداکثر مقدار توان استفاده کرد، زیرا تنها در نقاط خاصی از زمان به آن می رسد. لازم است از توان متوسط برای دوره استفاده شود - نسبت کل انرژی W وارد مدار برای دوره به مقدار دوره:
![]()
بنابراین، مقدار گرمای آزاد شده در طول زمان T:
مقدار مؤثر I جریان متناوب برابر با قدرت چنین است جریان مستقیم، که در زمانی برابر با دوره T، همان مقدار گرما را آزاد می کند جریان متناوب:
از این رو مقدار موثر جریان است
به طور مشابه مقدار ولتاژ موثر
تبدیل کننده
تبدیل کننده- دستگاهی که ولتاژ را چندین بار افزایش یا کاهش می دهد و عملاً هیچ اتلاف انرژی ندارد.
ترانسفورماتور از یک هسته فولادی تشکیل شده است که از صفحات جداگانه مونتاژ شده است که دو سیم پیچ با سیم پیچی روی آن نصب شده است. سیم پیچ اولیه به منبع ولتاژ متناوب متصل می شود و دستگاه هایی که برق مصرف می کنند به ثانویه متصل می شوند.
ارزش
![]()
نسبت تبدیل نامیده می شود. برای ترانسفورماتور کاهنده K> 1، برای ترانسفورماتور پلهآپ K< 1.
مثال.بار روی صفحات خازن مدار نوسانی در طول زمان مطابق با معادله تغییر می کند. دوره و فرکانس نوسانات در مدار، فرکانس چرخه ای، دامنه نوسانات بار و دامنه نوسانات جریان را بیابید. معادله i=i(t) را بنویسید که وابستگی شدت جریان به زمان را بیان می کند.

از معادله بر می آید که . دوره با فرمول فرکانس چرخه ای تعیین می شود
![]()
فرکانس نوسان
![]()
وابستگی قدرت فعلی به زمان به شکل زیر است:
دامنه جریان
پاسخ:بار با دوره 0.02 ثانیه و فرکانس 50 هرتز نوسان می کند، که مربوط به فرکانس چرخه ای 100 راد در ثانیه است، دامنه نوسانات جریان 510 3 A است، جریان طبق قانون تغییر می کند:
من=-5000sin100t
وظایف و آزمایشات با موضوع "مبحث 10. "نوسانات و امواج الکترومغناطیسی."
- حرکت نوسانی ارتعاشات رایگان دامنه، فرکانس، دوره نوسان - نوسانات و امواج مکانیکی. درجه صدا 9
در مدارهای الکتریکی و همچنین در سیستم های مکانیکی، مانند وزنه روی فنر یا آونگ، ممکن است وجود داشته باشد ارتعاشات رایگان.
ارتعاشات الکترومغناطیسیتغییرات متناوب مرتبط در بار، جریان و ولتاژ نامیده می شود.
رایگاننوسانات به نوساناتی گفته می شود که بدون تأثیر خارجی به دلیل انرژی انباشته شده اولیه رخ می دهند.
مجبورنوسانات موجود در مدار تحت تأثیر یک نیروی الکتروموتور خارجی دوره ای نامیده می شوند
نوسانات الکترومغناطیسی آزاد به طور دوره ای تغییرات در مقادیر الکترومغناطیسی را تکرار می کنند (q- شارژ الکتریکی،من- قدرت فعلی،U- اختلاف پتانسیل) بدون مصرف انرژی از منابع خارجی رخ می دهد.
تک یاخته سیستم الکتریکی، قادر به انجام نوسانات آزاد است حلقه RLC سریالیا مدار نوسانی.
مدار نوسانی -یک سیستم متشکل از خازن های خازنی متصل به سری استسی، سلف هاL و یک هادی با مقاومتآر
یک مدار نوسانی بسته متشکل از اندوکتانس L را در نظر بگیرید و ظروف با.
برای تحریک نوسانات در این مدار، باید خازن را از یک بار مشخص از منبع مطلع کرد. ε . وقتی کلید کدر موقعیت 1 قرار دارد، خازن به ولتاژ شارژ می شود. پس از تغییر کلید به موقعیت 2، فرآیند تخلیه خازن از طریق مقاومت آغاز می شود. آرو یک سلف L. تحت شرایط خاصی، این فرآیند می تواند نوسانی باشد.

نوسانات الکترومغناطیسی آزاد را می توان روی صفحه اسیلوسکوپ مشاهده کرد.
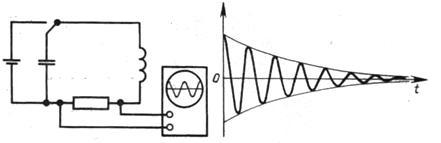
همانطور که از نمودار نوسان به دست آمده در اسیلوسکوپ مشاهده می شود، نوسانات الکترومغناطیسی آزاد عبارتند از محو شدن، یعنی دامنه آنها با زمان کاهش می یابد. این به خاطر مقداری از انرژی الکتریکی است مقاومت فعال R به انرژی داخلی تبدیل می شود. هادی (هادی هنگام عبور از آن گرم می شود جریان الکتریسیته).
بیایید ببینیم که چگونه نوسانات در آن رخ می دهد مدار نوسانیو چه تغییرات انرژی رخ می دهد. اجازه دهید ابتدا موردی را در نظر بگیریم که هیچ اتلاف انرژی الکترومغناطیسی در مدار وجود ندارد ( آر = 0).
اگر خازن را با ولتاژ U 0 شارژ کنید، در زمان اولیه t 1 = 0، مقادیر دامنه ولتاژ U 0 و شارژ q 0 = CU 0 بر روی صفحات خازن ایجاد می شود.
کل انرژی W سیستم برابر با انرژی میدان الکتریکی W el است:
![]()
اگر مدار بسته باشد، جریان شروع به جریان می کند. Emf در مدار ظاهر می شود. خود القایی
به دلیل خود القایی در سیم پیچ، خازن فوراً تخلیه نمی شود، بلکه به تدریج تخلیه می شود (از آنجایی که طبق قانون لنز، جریان القایی حاصل با میدان مغناطیسی خود، تغییر در شار مغناطیسی ناشی از آن را خنثی می کند. ، میدان مغناطیسی جریان القایی اجازه نمی دهد که شار مغناطیسی جریان فوراً در کانتور افزایش یابد). در این حالت جریان به تدریج افزایش می یابد و در زمان t 2 =T/4 به حداکثر مقدار I 0 می رسد و شارژ خازن برابر با صفر می شود.
با تخلیه خازن، انرژی میدان الکتریکی کاهش می یابد، اما در عین حال انرژی میدان مغناطیسی افزایش می یابد. انرژی کل مدار پس از تخلیه خازن برابر با انرژی میدان مغناطیسی W m است:
در لحظه بعد از زمان، جریان در همان جهت جریان می یابد و به صفر کاهش می یابد که باعث شارژ مجدد خازن می شود. پس از تخلیه خازن به دلیل خودالقایی، جریان فوراً متوقف نمی شود (اکنون میدان مغناطیسی جریان القایی اجازه نمی دهد شار مغناطیسی جریان در مدار فوراً کاهش یابد). در زمان t 3 \u003d T / 2 ، شارژ خازن دوباره حداکثر و برابر با شارژ اولیه q \u003d q 0 است ، ولتاژ نیز برابر با U \u003d U 0 اولیه است و جریان در مدار صفر I \u003d 0.
سپس خازن دوباره تخلیه می شود، جریان از طریق سلف در جهت مخالف جریان می یابد. پس از مدت زمانی T، سیستم به حالت اولیه خود باز می گردد. نوسان کامل کامل شده است، روند تکرار می شود.
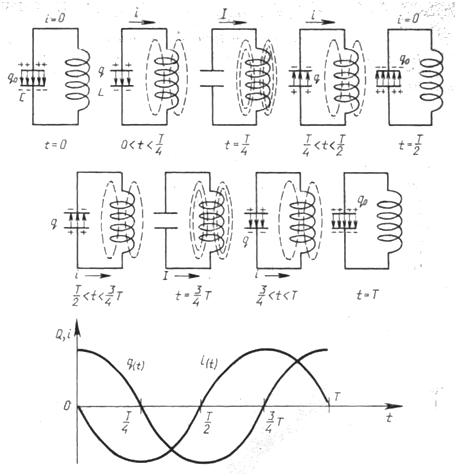
نمودار تغییر بار و قدرت جریان با نوسانات الکترومغناطیسی آزاد در مدار نشان می دهد که نوسانات قدرت جریان نسبت به نوسانات شارژ به اندازه π/2 عقب است.
در هر زمان معین، کل انرژی برابر است با:
![]()
با ارتعاشات آزاد، یک تبدیل دوره ای انرژی الکتریکی رخ می دهد دبلیو e، در خازن ذخیره شده و به انرژی مغناطیسی تبدیل می شود دبلیوسیم پیچ متر و بالعکس. اگر در مدار نوسانی تلفات انرژی وجود نداشته باشد، کل انرژی الکترومغناطیسی سیستم ثابت می ماند.
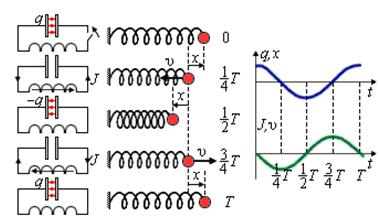
ارتعاشات الکتریکی آزاد مشابه ارتعاشات مکانیکی است. شکل نمودارهای تغییر شارژ را نشان می دهد q(تی) خازن و بایاس ایکس(تی) بار از موقعیت تعادل و همچنین نمودارهای جاری من(تی) و سرعت بار υ( تی) برای یک دوره نوسان.
در صورت عدم وجود میرایی، نوسانات آزاد در یک مدار الکتریکی هستند هارمونیکیعنی طبق قانون رخ می دهند
q(تی) = q 0 cos(ω تی + φ 0)
گزینه ها Lو سیمدار نوسانی فقط فرکانس طبیعی نوسانات آزاد و دوره نوسانات را تعیین می کند - فرمول تامپسون
دامنه q 0 و فاز اولیه φ 0 تعیین می شود شرایط اولیه، یعنی روشی که در آن سیستم از تعادل خارج شد.
برای نوسانات شارژ، ولتاژ و جریان، فرمول ها به دست می آیند:
برای خازن:
q(تی) = q 0 cosω 0 تی
U(تی) = U 0 cosω 0 تی
برای یک سلف:
من(تی) = من 0 cos(ω 0 تی+ π/2)
U(تی) = U 0 cos(ω 0 تی + π)
به یاد بیاوریم ویژگی های اصلی حرکت نوسانی:
q 0, U 0 , من 0 - دامنهمدول بزرگترین مقدار کمیت نوسان است
تی - دوره زمانی- حداقل فاصله زمانی که پس از آن فرآیند به طور کامل تکرار می شود
ν - فرکانس- تعداد نوسانات در واحد زمان
ω - فرکانس چرخه ایتعداد نوسانات در 2n ثانیه است
φ - فاز نوسان- مقداری که در زیر علامت کسینوس (سینوس) قرار دارد و وضعیت سیستم را در هر زمان مشخص می کند.
کشف امواج رادیویی به بشریت فرصت های زیادی داده است. از جمله: رادیو، تلویزیون، رادار، تلسکوپ های رادیویی و ارتباطات بی سیم. همه اینها زندگی را برای ما آسان تر کرد. با کمک رادیو، مردم همیشه میتوانند از امدادگران کمک بخواهند، کشتیها و هواپیماها میتوانند سیگنال خطر ارسال کنند و شما میتوانید بفهمید که در دنیا چه اتفاقی میافتد.
فرضیه وجود امواج رادیویی توسط دانشمند انگلیسی جیمز ماکسول بر اساس مطالعه کار فارادی در مورد الکتریسیته مطرح شد. برای فرضیه سازی در مورد امکان امواج الکترومغناطیسیماکسول دلایل زیر را داشت. کشف جریان القایی توسط فارادی. ماکسول ظهور یک جریان القایی را با ظهور میدان الکتریکی گردابی با هر تغییری در میدان مغناطیسی توضیح داد. او در ادامه پیشنهاد کرد که میدان الکتریکی همین ویژگیها را دارد: با هر تغییری در میدان الکتریکی در فضای اطراف، یک میدان الکتریکی گردابی ایجاد میشود.
پس از شروع، فرآیند تولید متقابل میدان های مغناطیسی و الکتریکی باید بدون وقفه ادامه یابد و طرح موج رادیویی را به تصویر بکشد.
بیشتر و بیشتر مناطق جدید در فضای اطراف. فرآیند تولید متقابل میدان های الکتریکی و مغناطیسی در صفحات عمود بر یکدیگر رخ می دهد. میدان های الکتریکی و مغناطیسی می توانند در ماده و در خلاء وجود داشته باشند و می توانند در خلاء منتشر شوند. شرط ظهور امواج الکترومغناطیسی، حرکت شتابان بارهای الکتریکی است. بنابراین، تغییر در میدان مغناطیسی زمانی اتفاق میافتد که جریان در هادی تغییر کند، و تغییر در جریان زمانی رخ میدهد که سرعت بارها تغییر کند. بنابراین، امواج الکترومغناطیسی باید در طول حرکت شتابان بارهای الکترومغناطیسی ایجاد شوند.
اما ایجاد امواج الکترومغناطیسی به طور تجربی متعلق به فیزیکدان هرتز است. برای این کار، هرتز از شکاف جرقه با فرکانس بالا (ویبراتور) استفاده کرد. این آزمایش توسط هرتز در سال 1888 انجام شد. ویبراتور شامل دو میله بود که توسط یک شکاف جرقه از هم جدا شده بودند. هرتز با امواجی با فرکانس 100000000 هرتز آزمایش کرد. هرتز با محاسبه فرکانس طبیعی نوسانات الکترومغناطیسی ویبراتور، توانست سرعت موج الکترومغناطیسی را با استفاده از فرمول υ=λν تعیین کند که تقریباً برابر با سرعت نور است: c=300000 km/s . تجربه هرتز به طرز درخشانی پیش بینی های ماکسول را تایید کرد. برای تحریک نوسانات، ویبراتور به یک سلف متصل شد. چه زمانی 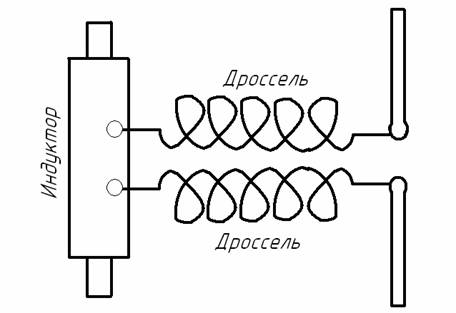 ولتاژ در سراسر شکاف جرقه به مقدار شکست رسید، جرقه ای به وجود آمد که هر دو نیمه ویبراتور را به هم متصل کرد. در نتیجه، نوسانات میرایی آزاد به وجود آمد که تا خاموش شدن جرقه ادامه یافت. و به منظور جلوگیری از انشعاب جریان فرکانس بالا ناشی از نوسانات به سیم پیچ سلف، چوک ها (کویل هایی با اندوکتانس بالا) بین ویبراتور و سلف روشن شدند. پس از خاموش شدن جرقه، ویبراتور دوباره از سلف شارژ شد و کل فرآیند دوباره تکرار شد. بنابراین، ویبراتور هرتز مجموعهای از قطارها از امواج ضعیف را برانگیخت.
ولتاژ در سراسر شکاف جرقه به مقدار شکست رسید، جرقه ای به وجود آمد که هر دو نیمه ویبراتور را به هم متصل کرد. در نتیجه، نوسانات میرایی آزاد به وجود آمد که تا خاموش شدن جرقه ادامه یافت. و به منظور جلوگیری از انشعاب جریان فرکانس بالا ناشی از نوسانات به سیم پیچ سلف، چوک ها (کویل هایی با اندوکتانس بالا) بین ویبراتور و سلف روشن شدند. پس از خاموش شدن جرقه، ویبراتور دوباره از سلف شارژ شد و کل فرآیند دوباره تکرار شد. بنابراین، ویبراتور هرتز مجموعهای از قطارها از امواج ضعیف را برانگیخت.
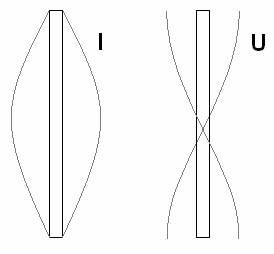 و در خلال این نوسانات موج ثابت جریان و ولتاژ برقرار شد. قدرت فعلی I حداکثر (آنتیود) در وسط ویبراتور بود و در انتهای آن ناپدید شد. ولتاژ U در وسط ویبراتور یک گره داشت، در انتها - آنتی گره. آزمایشات هرتز توسط P.N. Lebedev در سال 1894 ادامه یافت. P.N. لبدف شکست مضاعف امواج را در یک کریستال کشف کرد. همچنین امواج رادیویی تمام خصوصیات اولیه امواج را دارند.
و در خلال این نوسانات موج ثابت جریان و ولتاژ برقرار شد. قدرت فعلی I حداکثر (آنتیود) در وسط ویبراتور بود و در انتهای آن ناپدید شد. ولتاژ U در وسط ویبراتور یک گره داشت، در انتها - آنتی گره. آزمایشات هرتز توسط P.N. Lebedev در سال 1894 ادامه یافت. P.N. لبدف شکست مضاعف امواج را در یک کریستال کشف کرد. همچنین امواج رادیویی تمام خصوصیات اولیه امواج را دارند.
امواج الکترومغناطیسی بسته به طول موج (یا فرکانس نوسان) به طور معمول به محدوده های اصلی زیر تقسیم می شوند: امواج رادیویی، امواج مادون قرمز، اشعه ایکس، طیف مرئی، امواج ماوراء بنفش و پرتوهای گاما. چنین تقسیم بندی امواج الکترومغناطیسی بر اساس تفاوت در خواص آنها در طول تابش، انتشار و تعامل با ماده است.
علیرغم این واقعیت که خواص امواج الکترومغناطیسی با دامنه های مختلف می تواند به شدت با یکدیگر متفاوت باشد، همه آنها یک ماهیت موجی دارند و توسط سیستم معادلات ماکسول توصیف می شوند. کمیت ها و در یک موج الکترومغناطیسی در ساده ترین حالت بر اساس قانون هارمونیک متفاوت است. معادلات یک موج الکترومغناطیسی صفحه ای که در جهت Z منتشر می شود عبارتند از:
جایی که فرکانس چرخه ای است، n فرکانس است، عدد موج است، فاز اولیه نوسانات است.
امواج الکترومغناطیسی امواج عرضی هستند، یعنی. نوسانات بردارهای شدت جریان الکتریکی متناوب و القای میدان مغناطیسی متناوب متقابلاً عمود هستند و در صفحه ای عمود بر بردار سرعت انتشار موج قرار دارند. بردارها، و یک سیستم سمت راست را تشکیل می دهند: از انتهای بردار، چرخش از k به کوچکترین زاویه در خلاف جهت عقربه های ساعت رخ می دهد (شکل 1).
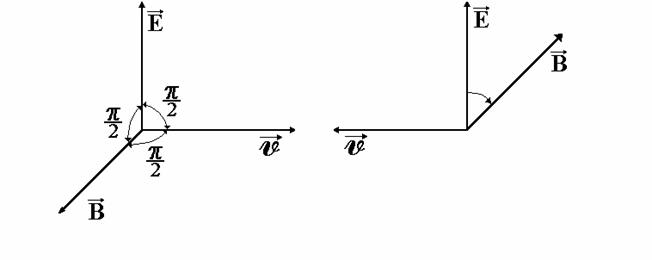
روی انجیر شکل 2 توزیع بردارها و یک موج الکترومغناطیسی را در امتداد محور OZ در داخل نشان می دهد این لحظهزمان t.
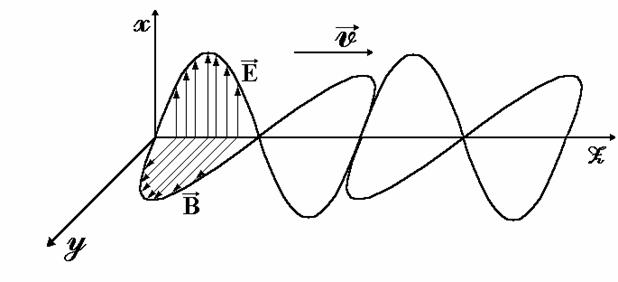 برنج. 2
برنج. 2
از فرمول (1) بر می آید که بردارها و در یک موج الکترومغناطیسی در همان فاز (در فاز) نوسان می کنند، یعنی. آنها به طور همزمان ناپدید می شوند و به طور همزمان به حداکثر مقادیر خود می رسند.
با توجه به عرضی بودن موج الکترومغناطیسی، می توان پدیده های مرتبط با جهت گیری خاصی از بردارها و در فضا را مشاهده کرد. با توجه به این خواص، امکان استفاده از امواج الکترومغناطیسی در ارتباطات رادیویی وجود دارد.
 اولین کسی که از امواج رادیویی برای ارتباطات بی سیم استفاده کرد، فیزیکدان روسی A. Popov بود. پوپوف در 7 می 1895 پیامی را با استفاده از امواج الکترومغناطیسی به فاصله 250 متری ارسال کرد (کلمات "هاینریش هرتز" مخابره شد). پوپوف برای دریافت پیام ها از توانایی پودرهای فلزی استفاده کرد که تحت تأثیر ارتعاشات الکتریکی با فرکانس بالا به هم بچسبند و در نتیجه رسانایی الکتریکی آنها را افزایش دهند. یک آنتن متصل به زمین A به عنوان فرستنده عمل می کند. در مدار فرستنده، B یک منبع ولتاژ متناوب بالا است که توسط باتری E تغذیه می شود. هنگامی که کلید K بسته می شود، جرقه ای در شکاف جرقه ایجاد می شود که یک فرآیند نوسانی است. در نتیجه فرستنده و گیرنده آنتن ..
اولین کسی که از امواج رادیویی برای ارتباطات بی سیم استفاده کرد، فیزیکدان روسی A. Popov بود. پوپوف در 7 می 1895 پیامی را با استفاده از امواج الکترومغناطیسی به فاصله 250 متری ارسال کرد (کلمات "هاینریش هرتز" مخابره شد). پوپوف برای دریافت پیام ها از توانایی پودرهای فلزی استفاده کرد که تحت تأثیر ارتعاشات الکتریکی با فرکانس بالا به هم بچسبند و در نتیجه رسانایی الکتریکی آنها را افزایش دهند. یک آنتن متصل به زمین A به عنوان فرستنده عمل می کند. در مدار فرستنده، B یک منبع ولتاژ متناوب بالا است که توسط باتری E تغذیه می شود. هنگامی که کلید K بسته می شود، جرقه ای در شکاف جرقه ایجاد می شود که یک فرآیند نوسانی است. در نتیجه فرستنده و گیرنده آنتن ..
شروع به انتشار امواج رادیویی می کند. این امواج که به آنتن A' ایستگاه گیرنده می رسند، نوسانات الکترومغناطیسی را در مدار حاوی آنتن زمین شده و همدوره T تحریک می کنند. مقاومت همدگر به شدت کاهش می یابد و در نتیجه مدار باتری E' بسته می شود. که یک رله الکترومغناطیسی وجود دارد که چکش F را جذب می کند. در همان زمان، در نقطه O مدار باتری قوی تر E را می بندد، که بر روی دستگاه نوشتن LM عمل می کند. در همان زمان، چکش D به منسجم T برخورد می کند و مدار باتری E' را باز می کند (برای دریافت سیگنال بعدی).
این رادیو نه تنها برای رادیو مدرن، بلکه برای تلویزیونها، تلسکوپهای رادیویی نیز به وجود آمد. تلفن های همراهو برای بسیاری چیزهای دیگر که بدون آنها مردم نمی توانند زندگی امروز خود را تصور کنند.
گیرنده های رادیویی مدرن کاملاً متفاوت از اجداد خود هستند ، اما اصل عملکرد مانند گیرنده های Popov باقی می ماند. یک گیرنده مدرن همچنین دارای یک آنتن است که در آن موج ورودی باعث ایجاد نوسانات مغناطیسی بسیار ضعیف می شود. همانطور که در گیرنده Popov، انرژی این نوسانات به طور مستقیم برای دریافت استفاده نمی شود. سیگنال های ضعیف فقط منابع انرژی را کنترل می کنند که مدارهای بعدی را تغذیه می کنند. اکنون چنین کنترلی با استفاده از دستگاه های نیمه هادی انجام می شود.
در سال 1899 امکان دریافت سیگنال با استفاده از تلفن کشف شد. در آغاز سال 1900، ارتباطات رادیویی با موفقیت در عملیات نجات در خلیج فنلاند مورد استفاده قرار گرفت. با مشارکت پوپوف، معرفی ارتباطات رادیویی در نیروی دریایی و ارتش روسیه آغاز شد.
در خارج از کشور، بهبود چنین دستگاه هایی توسط یک شرکت سازماندهی شده توسط دانشمند ایتالیایی مارکونی انجام شد. آزمایشهایی که در مقیاس وسیع انجام شد، امکان انتقال رادیو تلگراف را در سراسر اقیانوس اطلس فراهم کرد.
مهمترین مرحله در توسعه ارتباطات رادیویی، ایجاد یک ژنراتور نوسانات الکترومغناطیسی بدون میرا در سال 1913 بود.
علاوه بر انتقال سیگنال های تلگراف، متشکل از پالس های کوتاه و طولانی تر امواج الکترومغناطیسی، ارتباطات رادیویی تلفنی قابل اعتماد و با کیفیت بالا امکان پذیر شد - انتقال گفتار و موسیقی با استفاده از امواج الکترومغناطیسی.
در ارتباطات رادیویی تلفن، نوسانات فشار هوا در یک موج صوتی توسط یک میکروفون به ارتعاشات الکتریکی به همان شکل تبدیل می شود. به نظر می رسد که اگر این نوسانات تقویت شوند و به آنتن وارد شوند، می توان گفتار و موسیقی را از فواصل دور با استفاده از امواج الکترومغناطیسی منتقل کرد. با این حال، در واقعیت، چنین روش انتقال امکان پذیر نیست.
واقعیت این است که نوسانات فرکانس صوت نوسانات نسبتاً آهسته و امواج الکترومغناطیسی کم هستند.
فرکانس های (صوتی) تقریباً اصلاً منتشر نمی شوند.
برای انتقال این امواج در فواصل طولانی، باید آنها را به نوسان تبدیل کرد. فرکانس بالا، اما برای اینکه اطلاعاتی که حمل می کنند خراب نشود. فرآیند تبدیل نوسانات الکترومغناطیسی فرکانس پایین به نوسانات فرکانس بالا مدولاسیون نامیده می شود. مدولاسیون دامنه برای تبدیل امواج صوتی استفاده می شود.
 در فرآیند مدولاسیون، دامنه سیگنال های فرکانس پایین بر روی سیگنال فرکانس بالا قرار می گیرد.
در فرآیند مدولاسیون، دامنه سیگنال های فرکانس پایین بر روی سیگنال فرکانس بالا قرار می گیرد.
مدولاسیون یک فرآیند کند است. اینها چنین تغییراتی در یک سیستم نوسانی با فرکانس بالا هستند که در آن نوسانات با فرکانس بالا را قبل از تغییر قابل توجه دامنه آنها انجام می دهد.
بدون مدولاسیون، انتقال تلگراف، تلفن یا تلویزیون وجود ندارد.
 برای اجرای مدولاسیون دامنه نوسانات الکترومغناطیسی با فرکانس بالا، یک سیم پیچ ترانسفورماتور به صورت سری به مدار نوسانی در مدار الکتریکی ژنراتور ترانزیستور متصل می شود. یک ولتاژ فرکانس صوتی متناوب به سیم پیچ دوم ترانسفورماتور، به عنوان مثال، پس از تقویت لازم، از خروجی میکروفون تامین می شود. جریان متناوب در سیم پیچ دوم ترانسفورماتور باعث ایجاد ولتاژ در انتهای سیم پیچ اول ترانسفورماتور می شود.
برای اجرای مدولاسیون دامنه نوسانات الکترومغناطیسی با فرکانس بالا، یک سیم پیچ ترانسفورماتور به صورت سری به مدار نوسانی در مدار الکتریکی ژنراتور ترانزیستور متصل می شود. یک ولتاژ فرکانس صوتی متناوب به سیم پیچ دوم ترانسفورماتور، به عنوان مثال، پس از تقویت لازم، از خروجی میکروفون تامین می شود. جریان متناوب در سیم پیچ دوم ترانسفورماتور باعث ایجاد ولتاژ در انتهای سیم پیچ اول ترانسفورماتور می شود.
ولتاژ متناوب فرکانس صوتی به ولتاژ ثابت منبع جریان اضافه می شود. تغییرات ولتاژ بین امیتر و کلکتور ترانزیستور منجر به تغییرات با فرکانس صوتی در دامنه نوسانات جریان فرکانس بالا در مدار ژنراتور می شود. چنین نوسانات فرکانس بالایی را مدوله شده با دامنه می نامند.
آنتن فرستنده رادیویی به صورت القایی به مدار نوسانی ژنراتور متصل می شود. نوسانات اجباری جریان فرکانس بالا که در آنتن رخ می دهد امواج الکترومغناطیسی ایجاد می کند.
 امواج الکترومغناطیسی ساطع شده از آنتن فرستنده رادیویی باعث نوسانات اجباری الکترون های آزاد در هر رسانایی می شود. ولتاژ بین انتهای هادی که در آن موج الکترومغناطیسی نوسانات اجباری جریان الکتریکی را تحریک می کند، متناسب با طول هادی است. بنابراین، برای دریافت امواج الکترومغناطیسی در ساده ترین گیرنده رادیویی آشکارساز، از یک سیم بلند - یک آنتن گیرنده (1) استفاده می شود. برای گوش دادن به تنها یک انتقال رادیویی، نوسانات ولتاژ مستقیماً به ورودی تقویت کننده هدایت نمی شود، بلکه ابتدا به یک مدار نوسانی (2) با فرکانس نوسان طبیعی در حال تغییر تغذیه می شود. تغییر در فرکانس طبیعی نوسانات در مدار گیرنده معمولاً با تغییر ظرفیت الکتریکی یک خازن متغیر انجام می شود. هنگامی که فرکانس نوسانات اجباری در آنتن با فرکانس طبیعی مدار منطبق می شود، رزونانس ایجاد می شود، در حالی که دامنه نوسانات اجباری ولتاژ روی صفحات خازن مدار به حداکثر مقدار خود می رسد. بنابراین، از تعداد زیادی از نوسانات الکترومغناطیسی تحریک شده در آنتن، نوسانات فرکانس مورد نظر متمایز می شود.
امواج الکترومغناطیسی ساطع شده از آنتن فرستنده رادیویی باعث نوسانات اجباری الکترون های آزاد در هر رسانایی می شود. ولتاژ بین انتهای هادی که در آن موج الکترومغناطیسی نوسانات اجباری جریان الکتریکی را تحریک می کند، متناسب با طول هادی است. بنابراین، برای دریافت امواج الکترومغناطیسی در ساده ترین گیرنده رادیویی آشکارساز، از یک سیم بلند - یک آنتن گیرنده (1) استفاده می شود. برای گوش دادن به تنها یک انتقال رادیویی، نوسانات ولتاژ مستقیماً به ورودی تقویت کننده هدایت نمی شود، بلکه ابتدا به یک مدار نوسانی (2) با فرکانس نوسان طبیعی در حال تغییر تغذیه می شود. تغییر در فرکانس طبیعی نوسانات در مدار گیرنده معمولاً با تغییر ظرفیت الکتریکی یک خازن متغیر انجام می شود. هنگامی که فرکانس نوسانات اجباری در آنتن با فرکانس طبیعی مدار منطبق می شود، رزونانس ایجاد می شود، در حالی که دامنه نوسانات اجباری ولتاژ روی صفحات خازن مدار به حداکثر مقدار خود می رسد. بنابراین، از تعداد زیادی از نوسانات الکترومغناطیسی تحریک شده در آنتن، نوسانات فرکانس مورد نظر متمایز می شود.
از مدار نوسانی گیرنده، نوسانات فرکانس بالا مدوله شده به آشکارساز می رسد (3). به عنوان یک آشکارساز، می توانید از یک دیود نیمه هادی استفاده کنید که جریان متناوب فرکانس بالا را تنها در یک جهت عبور می دهد. در طول هر نیم چرخه فرکانس بالا، پالس های جریان خازن (4) را شارژ می کنند، در همان زمان خازن به آرامی از طریق مقاومت (5) تخلیه می شود. اگر مقادیر ظرفیت خازن و مقاومت الکتریکی مقاومت به درستی انتخاب شوند، جریانی از مقاومت عبور می کند و با فرکانس صوتی مورد استفاده در هنگام تعدیل نوسانات در فرستنده رادیویی تغییر می کند. برای تبدیل ارتعاشات الکتریکی به صدا، یک ولتاژ متناوب فرکانس صدا به تلفن اعمال می شود (6).
رادیو آشکارساز بسیار ناقص است. حساسیت بسیار پایینی دارد و بنابراین فقط میتواند با موفقیت ارسالهای رادیویی را از ایستگاههای رادیویی قدرتمند یا فرستندههای رادیویی نزدیک دریافت کند.
برای افزایش حساسیت در گیرندههای رادیویی مدرن، سیگنال از مدار نوسانی به ورودی تقویتکننده فرکانس بالا (UHF) و از خروجی تقویتکننده، نوسانات الکتریکی با فرکانس بالا به آشکارساز وارد میشود. برای افزایش قدرت سیگنال صوتیدر خروجی گیرنده رادیویی، نوسانات الکتریکی فرکانس صدا از خروجی آشکارساز به ورودی تقویت کننده فرکانس پایین تغذیه می شود.
ولتاژ متناوب فرکانس صوتی از خروجی ULF به بلندگو تغذیه می شود.
برای تقویت نوسانات الکتریکی فرکانس های بالا و پایین می توان از مدارهایی با لوله های الکترونیکی یا ترانزیستورها استفاده کرد.
به لطف امواج رادیویی، جهان ما شناخته شده است و ذرات بنیادی ماده کشف می شوند. حتی موجودات زنده نیز امواج رادیویی ساطع می کنند و حیواناتی مانند ماهی های سر چکشی از آنها برای شکار استفاده می کنند.
موضوعات کدکننده USE: نوسانات الکترومغناطیسی آزاد، مدار نوسانی، نوسانات الکترومغناطیسی اجباری، رزونانس، نوسانات الکترومغناطیسی هارمونیک.
ارتعاشات الکترومغناطیسیتغییرات دوره ای در شارژ، جریان و ولتاژ است که در آن رخ می دهد مدار الکتریکی. ساده ترین سیستمیک مدار نوسانی برای مشاهده نوسانات الکترومغناطیسی استفاده می شود.
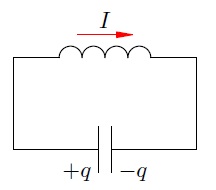
مدار نوسانی
مدار نوسانیاین یک مدار بسته است که توسط یک خازن و یک سیم پیچ به صورت سری تشکیل شده است.
خازن را شارژ می کنیم، یک سیم پیچ به آن وصل می کنیم و مدار را می بندیم. شروع خواهد شد نوسانات الکترومغناطیسی آزاد- تغییرات دوره ای در شارژ خازن و جریان در سیم پیچ. به یاد می آوریم که این نوسانات آزاد نامیده می شوند زیرا بدون هیچ تأثیر خارجی - فقط به دلیل انرژی ذخیره شده در مدار - رخ می دهند.
دوره نوسانات در مدار را مانند همیشه از طریق نشان می دهیم. مقاومت سیم پیچ برابر با صفر در نظر گرفته خواهد شد.
بیایید همه چیز را با جزئیات در نظر بگیریم مراحل مهمفرآیند نوسان برای وضوح بیشتر، قیاسی با نوسانات آونگ فنری افقی ترسیم می کنیم.
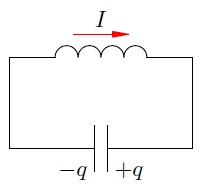
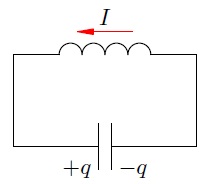
لحظه شروع: . شارژ خازن برابر است، جریانی از سیم پیچ وجود ندارد (شکل 1). اکنون خازن شروع به تخلیه می کند.

برنج. 1.
با وجود این واقعیت که مقاومت سیم پیچ صفر است، جریان بلافاصله افزایش نمی یابد. به محض اینکه جریان شروع به افزایش می کند، یک EMF خود القایی در سیم پیچ ظاهر می شود که از افزایش جریان جلوگیری می کند.
مقایسه. آونگ توسط یک مقدار به سمت راست کشیده می شود و در لحظه اولیه آزاد می شود. سرعت اولیه آونگ صفر است.
سه ماهه اول دوره: . خازن در حال تخلیه است، شارژ فعلی آن . جریان عبوری از سیم پیچ افزایش می یابد (شکل 2).
برنج. 2.
افزایش جریان به تدریج اتفاق می افتد: میدان الکتریکی گردابی سیم پیچ از افزایش جریان جلوگیری می کند و بر خلاف جریان هدایت می شود.
مقایسه. آونگ به سمت چپ به سمت موقعیت تعادل حرکت می کند. سرعت آونگ به تدریج افزایش می یابد. تغییر شکل فنر (همچنین مختصات آونگ است) کاهش می یابد.
پایان سه ماهه اول: . خازن کاملاً تخلیه شده است. قدرت جریان به حداکثر مقدار خود رسیده است (شکل 3). خازن اکنون شروع به شارژ می کند.

برنج. 3.
ولتاژ روی سیم پیچ صفر است، اما جریان فورا ناپدید نمی شود. به محض اینکه جریان شروع به کاهش می کند، یک EMF خود القایی در سیم پیچ ظاهر می شود که از کاهش جریان جلوگیری می کند.
مقایسه. آونگ از موقعیت تعادل عبور می کند. سرعت آن به حداکثر مقدار خود می رسد. انحراف فنر صفر است.
ربع دوم: . خازن شارژ می شود - باری با علامت مخالف در صفحات آن در مقایسه با آنچه در ابتدا بود ظاهر می شود (شکل 4).
برنج. 4.
قدرت جریان به تدریج کاهش می یابد: میدان الکتریکی گردابی سیم پیچ، که جریان کاهشی را پشتیبانی می کند، با جریان هدایت می شود.
مقایسه. آونگ به حرکت خود به سمت چپ ادامه می دهد - از موقعیت تعادل تا نقطه انتهایی سمت راست. سرعت آن به تدریج کاهش می یابد، تغییر شکل فنر افزایش می یابد.
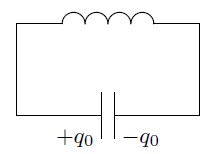
پایان سه ماهه دوم. خازن کاملاً شارژ شده است، بار آن دوباره برابر است (اما قطبیت متفاوت است). قدرت جریان صفر است (شکل 5). اکنون شارژ معکوس خازن آغاز می شود.
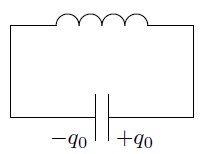
برنج. 5.
مقایسه. آونگ به نقطه منتهی الیه سمت راست خود رسیده است. سرعت آونگ صفر است. تغییر شکل فنر حداکثر و برابر است.
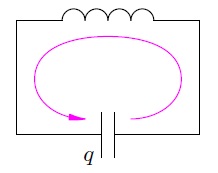
ربع سوم: . نیمه دوم دوره نوسان آغاز شد. فرآیندها در جهت مخالف پیش رفتند. خازن تخلیه می شود (شکل 6).
برنج. 6.
مقایسه. آونگ به عقب حرکت می کند: از نقطه منتهی به سمت راست به موقعیت تعادل.
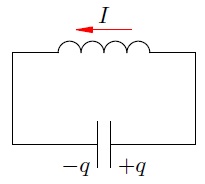
پایان کوارتر سوم: . خازن کاملاً تخلیه شده است. جریان حداکثر است و دوباره برابر است، اما این بار جهت متفاوتی دارد (شکل 7).
برنج. 7.
مقایسه. آونگ دوباره از موقعیت تعادل عبور می کند حداکثر سرعت، بیشینه سرعتاما این بار در جهت مخالف
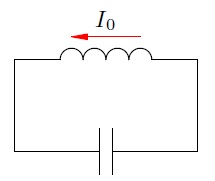
ربع چهارم: . جریان کاهش می یابد، خازن شارژ می شود (شکل 8).
برنج. 8.
مقایسه. آونگ به حرکت خود به سمت راست ادامه می دهد - از موقعیت تعادل به سمت چپ ترین نقطه.
پایان سه ماهه چهارم و کل دوره: . شارژ معکوس خازن کامل شده است، جریان صفر است (شکل 9).
برنج. 9.
این لحظه با لحظه یکسان است و این عکس تصویر 1 است. یک تکان کامل وجود داشت. اکنون نوسان بعدی آغاز می شود که طی آن فرآیندها دقیقاً به همان روشی که در بالا توضیح داده شد رخ می دهد.
مقایسه. آونگ به موقعیت اولیه خود بازگشت.
نوسانات الکترومغناطیسی در نظر گرفته شده هستند میر نشده- آنها به طور نامحدود ادامه خواهند داشت. به هر حال، ما فرض کردیم که مقاومت سیم پیچ صفر است!
به همین ترتیب، نوسانات آونگ فنری در غیاب اصطکاک، میر نمی شود.
در واقع، سیم پیچ مقداری مقاومت دارد. بنابراین، نوسانات در یک مدار نوسانی واقعی میرا می شوند. بنابراین، پس از یک نوسان کامل، شارژ خازن کمتر از مقدار اولیه خواهد بود. با گذشت زمان، نوسانات به طور کامل ناپدید می شوند: تمام انرژی ذخیره شده اولیه در مدار به شکل گرما در مقاومت سیم پیچ و سیم های اتصال آزاد می شود.
به همین ترتیب، ارتعاشات یک آونگ فنری واقعی میرا می شود: تمام انرژی آونگ به دلیل وجود اجتناب ناپذیر اصطکاک به تدریج به گرما تبدیل می شود.
تبدیل انرژی در مدار نوسانی
با فرض صفر بودن مقاومت سیم پیچ، به بررسی نوسانات بدون میرا در مدار ادامه می دهیم. خازن یک ظرفیت دارد، اندوکتانس سیم پیچ برابر است.
از آنجایی که اتلاف گرما وجود ندارد، انرژی مدار را ترک نمی کند: به طور مداوم بین خازن و سیم پیچ توزیع می شود.
بیایید لحظه ای را در نظر بگیریم که شارژ خازن حداکثر و برابر است و جریانی وجود ندارد. انرژی میدان مغناطیسی سیم پیچ در این لحظه صفر است. تمام انرژی مدار در خازن متمرکز می شود:
حال برعکس لحظه ای را در نظر بگیرید که جریان حداکثر و برابر است و خازن تخلیه می شود. انرژی خازن صفر است. تمام انرژی مدار در سیم پیچ ذخیره می شود:
در یک نقطه زمانی دلخواه، زمانی که بار خازن برابر است و جریان از سیم پیچ عبور می کند، انرژی مدار برابر است با:
بدین ترتیب،
(1)
رابطه (1) در حل بسیاری از مسائل استفاده می شود.
قیاس های الکترومکانیکی
در جزوه قبلی در مورد خود القایی، به قیاس بین اندوکتانس و جرم اشاره کردیم. اکنون میتوانیم چند تناظر دیگر بین کمیتهای الکترودینامیکی و مکانیکی برقرار کنیم.
برای آونگ فنری رابطه ای شبیه (1) داریم:
(2)
در اینجا، همانطور که قبلاً فهمیدید، سفتی فنر، جرم آونگ است، و مقادیر فعلی مختصات و سرعت آونگ و حداکثر مقادیر آنها هستند.
با مقایسه برابری های (1) و (2) با یکدیگر، مطابقت های زیر را مشاهده می کنیم:
(3)
(4)
(5)
(6)
بر اساس این تشابهات الکترومکانیکی، میتوانیم فرمولی برای دوره نوسانات الکترومغناطیسی در یک مدار نوسانی پیشبینی کنیم.
در واقع، دوره نوسان یک آونگ فنری، همانطور که می دانیم، برابر است با:
مطابق با قیاس (5) و (6)، در اینجا جرم را با اندوکتانس و سفتی را با خازن معکوس جایگزین می کنیم. ما گرفتیم:
(7)
قیاس های الکترومکانیکی شکست نمی خورند: فرمول (7) بیان درستی را برای دوره نوسان در مدار نوسانی می دهد. نامیده می شود فرمول تامسون. به زودی اشتقاق دقیق تر آن را ارائه خواهیم کرد.
قانون هارمونیک نوسانات در مدار
به یاد بیاورید که نوسانات نامیده می شوند هارمونیک، اگر مقدار نوسان با زمان مطابق قانون سینوس یا کسینوس تغییر کند. اگر توانستید این موارد را فراموش کنید، حتماً برگه "ارتعاشات مکانیکی" را تکرار کنید.
نوسانات بار روی خازن و قدرت جریان در مدار هارمونیک هستند. ما اکنون آن را ثابت خواهیم کرد. اما ابتدا باید قوانینی را برای انتخاب علامت برای شارژ خازن و قدرت جریان ایجاد کنیم - از این گذشته ، در طول نوسانات ، این مقادیر هم مقادیر مثبت و هم منفی را به خود می گیرند.
ابتدا انتخاب می کنیم جهت بای پس مثبتکانتور انتخاب نقشی ندارد. بگذارید این جهت باشد پادساعتگرد(شکل 10).
برنج. 10. جهت بای پس مثبت
قدرت فعلی مثبت در نظر گرفته می شود style="vertical-align:-20%;" class="tex" alt="">اگر جریان در جهت مثبت جریان یابد. در غیر این صورت جریان منفی خواهد بود.
بار یک خازن، بار آن صفحه است به کهیک جریان مثبت جریان دارد (یعنی صفحه نشان داده شده توسط فلش جهت بای پس). که در این مورد- شارژ ترک کردصفحات خازن
با چنین انتخابی از علائم جریان و بار، این رابطه صادق است: (با انتخاب متفاوت علائم، ممکن است اتفاق بیفتد). همانا نشانه های هر دو جزء یکی است: اگر style="vertical-align:-20%;" class="tex" alt="">، سپس شارژ صفحه سمت چپ افزایش می یابد و بنابراین style="vertical-align:-20%;" class="tex" alt="">.
مقادیر و با گذشت زمان تغییر می کنند، اما انرژی مدار بدون تغییر باقی می ماند:
(8)
بنابراین مشتق زمانی انرژی از بین می رود: . مشتق زمانی هر دو بخش رابطه (8) را می گیریم. فراموش نکنید که توابع مختلط در سمت چپ متمایز می شوند (اگر تابعی از است، پس طبق قانون تمایز یک تابع مختلط، مشتق مربع تابع ما برابر خواهد بود: ):
با جایگزینی اینجا و، دریافت می کنیم:
اما قدرت جریان تابعی برابر با صفر نیست. از همین رو
بیایید این را بازنویسی کنیم:
(9)
ما یک معادله دیفرانسیل از نوسانات هارمونیک به دست آورده ایم که در آن . این ثابت می کند که بار یک خازن بر اساس قانون هارمونیک (یعنی طبق قانون سینوس یا کسینوس) نوسان می کند. فرکانس چرخه ای این نوسانات برابر است با:
(10)
این مقدار نیز نامیده می شود فرکانس طبیعیکانتور؛ با این فرکانس است که رایگان (یا، همانطور که می گویند، خودنوسانات). دوره نوسان عبارت است از:
دوباره به فرمول تامسون رسیدیم.
وابستگی هارمونیک بار به زمان در مورد کلیبه نظر می رسد:
(11)
فرکانس چرخه ای با فرمول (10) یافت می شود. دامنه و فاز اولیه از شرایط اولیه تعیین می شود.
ما وضعیتی را که در ابتدای این جزوه به تفصیل مورد بحث قرار گرفت، بررسی خواهیم کرد. اجازه دهید شارژ خازن حداکثر و برابر باشد (مانند شکل 1). هیچ جریانی در حلقه وجود ندارد. سپس فاز اولیه است، به طوری که بار بر اساس قانون کسینوس با دامنه تغییر می کند:
(12)
بیایید قانون تغییر قدرت فعلی را پیدا کنیم. برای انجام این کار، رابطه (12) را با توجه به زمان متمایز میکنیم، و دوباره قانون یافتن مشتق یک تابع مختلط را فراموش نمیکنیم:
می بینیم که قدرت فعلی نیز طبق قانون هارمونیک تغییر می کند، این بار طبق قانون سینوسی:
(13)
دامنه قدرت جریان:
درک وجود "منهای" در قانون تغییر فعلی (13) دشوار نیست. برای مثال، فاصله زمانی را در نظر می گیریم (شکل 2).
جریان در جهت منفی: . از آنجایی که فاز نوسان در ربع اول است: . سینوس در سه ماهه اول مثبت است. بنابراین، سینوس در (13) در بازه زمانی در نظر گرفته شده مثبت خواهد بود. بنابراین، برای اطمینان از منفی بودن جریان، علامت منفی در فرمول (13) واقعا ضروری است.
حالا به انجیر نگاه کنید. 8 . جریان در جهت مثبت جریان دارد. "منهای" ما در این مورد چگونه کار می کند؟ ببینید اینجا چه خبر است!
بیایید نمودارهای بار و نوسانات جریان را به تصویر بکشیم، یعنی. نمودار توابع (12) و (13) . برای وضوح، ما این نمودارها را در همان محورهای مختصات ارائه می کنیم (شکل 11).
![]()
برنج. 11. نمودارهای نوسانات شارژ و جریان
توجه داشته باشید که صفرهای شارژ در اوج یا پایین فعلی رخ می دهد. برعکس، صفرهای فعلی با حداکثر یا حداقل شارژ مطابقت دارند.
با استفاده از فرمول ریخته گری
قانون تغییر فعلی (13) را به شکل زیر می نویسیم:
با مقایسه این عبارت با قانون تغییر بار، می بینیم که فاز جریان، برابر با، بزرگتر از فاز بار است. در این مورد، جریان گفته می شود پیشرو در فازشارژ در ; یا تغییر فازبین جریان و شارژ برابر است با؛ یا اختلاف فازبین جریان و شارژ برابر است با .
هدایت جریان شارژ در فاز به صورت گرافیکی خود را در این واقعیت نشان می دهد که نمودار فعلی جابجا شده است به سمت چپدر نسبت به نمودار شارژ. برای مثال، قدرت جریان به حداکثر یک چهارم دوره زودتر از رسیدن شارژ به حداکثر می رسد (و یک چهارم دوره فقط با اختلاف فاز مطابقت دارد).






