バッテリードライバーは非常に使いやすく、プロから家庭の職人まで幅広く使用されています。 通常、最初に故障するのはバッテリーです。 現在、電動工具のすべてのメーカーがリチウム電池に切り替えており、古いドライバー用に新しいニッケルカドミウム電池を購入することがますます問題になっており、これらの電池の価格はリチウム電池よりもはるかに高くなっています。
もちろん、中国製品を販売する各種サービスでバッテリーを購入することも可能です。 ただし、「缶」が入ったパッケージは到着するまでに時間がかかり、やはり一定の費用がかかります。 電池や缶を購入する代わりに、ドライバーを主電源に接続すれば、電池をすぐに使い切る必要はありません。 Aliexpressの強力な電源。 電源コードのせいで不便な点はたくさんありますが、常に何かを犠牲にしなければなりません。
ドライバーはどのくらいの電流を消費しますか?
適切な電源を選択する前に、どのような消費電流を考慮する必要があるかを理解する必要があります。 残念ながら、コードレス ドライバーのメーカーはモーターの消費電流を示していません。 バッテリー自体の容量(アンペアアワー)はバッテリーに必ず表示されていますが、それを理解することはできません。 ドライバーは動作モードでどのくらいの電流を消費しますか?。 メーカーが表示できる最大値はワット単位の出力ですが、これは非常にまれで、通常は出力が直接トルクで表示されます。
それでも電力がワット単位で表示されている場合は、消費電流を把握し、電流/電力マージンが小さい適切な電源を選択できます。 電流を計算するには、ワット単位の電力をドライバーの動作電圧 (この場合は 12 ボルト) で割れば十分です。 したがって、メーカーがたとえば 200 ワット - 200:12 = 16.6 A の電力を示した場合、これは動作モードでドライバーが消費する電流です。
ただし、示されている電力は非常にまれであり、すべての 12 ボルト ドライバーを特徴付ける普遍的な数値はありません。 モーターシャフトに完全にブレーキがかかると、電流が定格を大幅に超える可能性があり、この値を計算するのはそれほど簡単ではないことを理解する必要があります。 同時に、さまざまなフォーラムの分析と私たち自身の経験から、多くの場合、ドライバーを操作するには 10 A の電流で十分であり、多くのネジ締めや穴あけ機能を実行するには十分であることがわかりました。 シャフトの完全制動中の電流サージは 30 A を超える可能性があることが知られています。
さて、これらすべてからどのような結論が導き出せるでしょうか? 10 A の電流を供給する 12 V 電源はドライバーに適していますが、20 ~ 30 A のユニットを使用できる場合はさらに優れています。 これらは、ほとんどのドライバーに当てはまる平均的な数値です。
パワーユニット
ユニットや変圧器の購入は考えておりません。購入する場合は新しいバッテリーになります。 手持ちのもので検討してみます。 同じドライバーの充電器は熟しすぎたバナナの穴あけにのみ適しており、出力が低すぎるとすぐに言います。
理想的には、たとえばコンピュータの無停電電源装置からの降圧型の強力な 12 V 変圧器が適しています。 このような変圧器の電力は通常350〜500ワットです。 しかし、私はそのような変圧器を持っていませんでしたが、コンピューターの電源はたくさんありました。 誰かがさまざまな電子ジャンクを持っているなら、その中には必ず ATX コンピューターが転がっていると思います。
コンピュータの ATX ユニットはドライバーに非常に適しており、+12 ボルト バスの負荷容量により 10 ~ 20 アンペアの電流を除去できます。 小さな誤解を払拭したいと思います。ATX ボードが大きすぎるため、ドライバーのバッテリー ハウジングにユニットを詰め込むことはできません。 ブロック用に別のケースを作成するか、元の金属ケースに入れたままにしておく必要があります。 オリジナルのケースの欠点はほこりに弱いことであり、最小の修理でも大量のほこりを必要とします。
 かなり弱いユニットで、+12V バスの負荷はわずか 10 A です。可能であれば、より強力な 12 ボルト バスを備えたユニットを選択することをお勧めします。
かなり弱いユニットで、+12V バスの負荷はわずか 10 A です。可能であれば、より強力な 12 ボルト バスを備えたユニットを選択することをお勧めします。
模擬試験
動作する構造の構築を開始する前に、膝の上ですべてをテストし、ドライバーが負荷の下で安定して動作すること、および電源に深刻な過熱がないことを確認する必要があります。
コンピューターの電源を取り出してチェックします。ネットワークに接続し、出力ワイヤの束で緑色を見つけて(別の色でもよいと言われていますが、私はいつも緑色を見つけました)、ジャンパーで任意の電源に接続します。そのうちの黒いもの(出力の黒いワイヤはすべて共通出力であり、この場合はマイナスです)。 ユニットの電源がオンになり、黒と黄色のワイヤーの間に 12 ボルトの電圧が表示されます。 これは、マルチメーターを使用するか、コンピューター クーラーを指定された端子に接続することで確認できます。


すべてが正常で、ユニットの黄色 (+) 端子と黒 (-) 端子で約 12 ボルトが生成される場合は、続行します。 出力に電圧がない場合は、別のユニットを探すか、このユニットを修理する必要があります。これについては別のトピックで説明します。
ブロックの出力からプラグを切り取り、ブロックから出ている3〜4本の黄色と黒のワイヤーを取り出して並列に接続します。 プラグを切断するときは、緑色の開始導体を忘れずに、黒色に短絡する必要があります。 10〜20Aの適切な電流負荷容量を備えた12V電源を受け取りました。電流はユニットのモデルと電力によって異なります。


次に、バッテリーを使用せずに 12 V をドライバーの端子に接続する必要があります。バッテリーを使用して接続の極性を確認します。 さて、ドライバーをアイドル速度でチェックし、その後手動で速度を下げます。 この段階で問題が発生しました。ボタンを完全に押すとドライバーは動作しますが、ドライバーのボタンをゆっくりとスムーズに押すと、電源が保護状態になります。 保護をリセットするには、ユニットをネットワークから切断し、再度電源を入れる必要があります。 これではまったく機能しません。この不安定性を何らかの方法で修正する必要があります。
 ブロックボードをケースから取り出し、さらにマルチメーターを接続して電圧を常に監視しました
ブロックボードをケースから取り出し、さらにマルチメーターを接続して電圧を常に監視しました
私の考えでは、この現象は、電源とドライバーのボタンが PWM コントローラーによって制御されているため、電源線に沿った干渉によりコントローラー同士が何らかの形で干渉するために発生するのではないかと考えています。 私たちは即席の LC フィルターを使用してこの問題を解決しようとしています。
手元にあったものを使って 5 分でフィルターを組み立てました。16 ボルトで 1000 uF の電解コンデンサー 3 個、1 uF 未満の無極性コンデンサー、フェライト リングに直径 2 mm の銅線を 20 回巻き付けました。別のユニットから。 彼の図は次のとおりです。

そしてこれが彼の見た目です。 これは純粋な試用版であり、将来的にはこのデザインがドライバーのバッテリーハウジングに転送され、より正確に作成される予定です。

構造全体をチェックします。ボタンのどの位置でもブロックが保護されていません。素晴らしいです。 ここで、いくつかのネジをまとめて締めてみることができます。 ドライバーなら大きめのネジも締められるようです。

さて、ここですべての鼻水とワイヤーの山を取り除き、バッテリーケースから「死んだ缶」を取り外し、LCフィルターと交換し、より現実的な条件でドライバーをテストする必要があります。
作業構造の組み立て
使いやすさと接続を容易にするために、電源からのコードをバッテリーケースに入れました。 入手可能な3.5メートルの長さのコードを使用しました。 バッテリーからすべてのバッテリーセルを取り外し、LCフィルターを取り付けました。 さて、何らかの方法で動作するバッテリーを入手できれば、いつでもそれをドライバーに取り付けて、電源を予備として保管することができます。 バッテリーを捨てたわけではありません。どこに使用するかはわかっていますが、それは別のレビューのトピックです。

ユニットとドライバーを接続するコードには一定の抵抗とインダクタンスがあるため、L1 コイルの端子をジャンパーで閉じることを試みることができます。 理論的には、これにより電力がわずかに増加する可能性があります。
ドライバーはコード付きなので使い心地は良いのですが、手でブレーキをかける場合は正直少し弱いように感じました。 しかし、セルフタッピンねじを試しに締めてみると、私の疑問は払拭されました。長さ 35 mm のタッピンねじは、20 mm の合板に簡単にねじ込むことができます。 これは、ドライバーがあればほとんどの修理ニーズに対応できることを意味します。


ブロックからすべての出力ワイヤを切断し、緑色の開始ワイヤを残し、その端を基板の共通導体にはんだ付けし、そこにすべての黒い導体がはんだ付けされています。 すべてのワイヤのはんだを慎重に除去するのが最善ですが、私のはんだごてがこれには弱すぎたため、切断する必要がありました。 2本の短い硬い銅線を共通接点と+12(黄色の線がはんだ付けされている場所)にはんだ付けし、端子台を通してShuraへのコードに接続しました。

これでこのレビューを終了します。私たちが望んでいたものは達成されました - ドライバーはコンピューターの電源で完全に動作します。 将来的には、電源ボード用に亀裂のない高品質の合板ケースを作成する予定です。テストの結果、ボード上のヒートシンクはまったく加熱せず、素子の過熱を心配する必要がないことがわかりました。閉じたケースの中。

いくつかの追加
ドライバーを電源に接続するコードの損失を補償するには、電圧を 2 ~ 3 ボルト増やすと効果的です。 ただし、これは、ATX コンピューターの回路設計を理解し、何をすべきかを知っていることが前提です。
強力なトランスを使用できる場合、その出力である二次巻線の交流電圧は 12 V である必要があります。電圧が異なる場合は、二次巻線を巻き戻して調整することをお勧めします (電圧が 12 V を超える場合) ) または (12 V 未満の場合) 数回転巻き戻します。 12 V AC 電圧を整流およびフィルタリングすると、負荷なしで約 14.4 V になることに注意してください。 混乱しないでください。これは EMF 電圧であり、公称電圧よりも高いのは当然です。

変圧器に加えて、整流器が組み込まれており、ダイオードは 30 A を容易に保持できるはずです。ATX バージョンのように、コンデンサ フィルターをバッテリー ケースに配置する方が便利です。
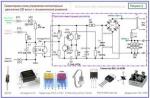
友人からドライバー用の外部電源を作ってほしいと頼まれました。 ドライバーと一緒に( 図1) 電源変圧器は旧ソ連のバーナー彫刻家「オーナメント 1」から持ち込まれました ( 図2)- 使えるかどうか見てみましょう?

もちろん、最初に、バッテリーコンパートメントを分解して「バンク」を調べました( 図3そして 図4)。 充電器を使用して各「缶」の機能を数回の充放電サイクルでチェックしました。10 個のうち、正常なのは 1 個だけで、3 個はほぼ正常で、残りは完全に「機能不全」でした。 つまり、必ず外部電源を作る必要があります。


電源を組み立てるには、ドライバーが動作中に消費する電流を知る必要があります。 実験室の電源に接続すると、モーターが3.5 Vで回転し始め、5〜6 Vでまともな電力がシャフトに現れることがわかります。 12 V が供給されているときにスタート ボタンを押すと、電源の保護が作動します。これは、消費電流が 4 A を超えることを意味します (保護はこの値に設定されています)。 ドライバーを低電圧で起動し、その後 12 V に上げると、正常に動作します。消費電流は約 2 A ですが、ネジが基板に半分までねじ込まれた瞬間に、電源の保護が働きます。再びトリガーされます。
消費電流の全体像を確認するために、ドライバーを車のバッテリーに接続し、プラスのワイヤ ギャップに 0.1 オームの抵抗を配置しました ( 図5)。 そこからの電圧降下がコンピュータに入力され、それを表示するためにプログラムが使用されました。 結果のグラフを次に示します。 図6.


左側の最初のパルスは、オン時の開始パルスです。 最大値は1.8Vに達しており、18A(I=U/R)の電流が流れていることがわかります。 次に、エンジンの速度が上がるにつれて、電流は 2 A に低下します。2 秒目の途中で、「ラチェット」が作動するまでドライバーのヘッドを手で締め付けます。このときの電流は約 17 A に増加し、その後、 3 が終了したら、スタート ボタンを 1 秒間放します。 ドライバーを操作するには、200 W の電力と最大 20 A の電流を供給できる電源が必要であることがわかりました。しかし、バッテリー収納部には 1.3 A/h と記載されているので、 図7)その場合、おそらく、すべてが一見したほど悪くはありません。

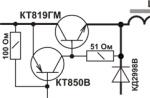
バーナーの電源を開き、出力電圧を測定します。 最大値は約 8.2 V ですが、もちろん十分ではありません。 整流ダイオードの両端の電圧降下を考慮すると、フィルタコンデンサの出力電圧は約10〜11Vになります。しかし、行き場がありません。次のとおりに回路を組み立てようとしています。 図8。 使用されているダイオードはブランド KD2998V (Imax=30 A、Umax=25 V) です。 VD1 ~ VD4 ダイオードは、バーナーの接触ソケットの花びらに取り付けられています ( 図9そして 図10)。 より小さな容量のものを19個並列接続して大きなコンデンサとして使用しました。 「バッテリー」全体はマスキングテープで包まれ、コンデンサーは、わずかな力で束全体がドライバーのバッテリーコンパートメントに入るようなサイズで選択されます( 図11そして 図12).





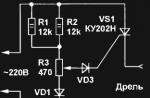
ヒューズブロックはバーナー内で非常に不便であるため、ヒューズブロックを取り外し、ヒューズを 220 V ワイヤの 1 本と干渉抑制コンデンサ C1 の出力の間に「直接」はんだ付けしました ( 図13)。 ケースを閉じると、電源線はゴムリングを介してしっかりと圧着されているため、外側から曲げても内側で垂れ下がることはありません。

ドライバーの性能テストでは、すべてが正常に動作していることがわかりました。ドリルで穴を開けてネジを締めると、30 分後には変圧器が摂氏約 50 度まで加熱し、ダイオードも同じ温度まで加熱し、ラジエーターは必要ありませんでした。 このような電源を備えたドライバーは、車のバッテリーから電力を供給する場合に比べて電力が少なくなりますが、これは理解できます。コンデンサの電圧は10.1 Vを超えず、シャフトの負荷が増加すると、電圧はさらに低下します。 ちなみに、1.77平方mmの断面積で使用した場合でも、長さ約2メートルの電源線ではかなり「失われます」。 ワイヤー上の落下を確認するために、次に従って回路を組み立てました。 図14、コンデンサの電圧と電源線の 1 つの導体の電圧降下を制御します。 さまざまな負荷における結果をグラフ形式で示します。 図15。 ここで、左チャンネルはコンデンサの電圧、右チャンネルは整流器ブリッジからコンデンサに向かう「マイナス」ワイヤの降下です。 ドライバーのヘッドを手で止めると、電源電圧が 5 V 未満のレベルに低下することがわかります。同時に、電源コードでは約 2.5 V (それぞれ 1.25 V の 2 倍) が低下し、電流がパルス状になり、整流器ブリッジの動作に関連する ( 図16)。 電源コードを断面積約 3 平方 mm の別のコードに交換すると、ダイオードとトランスの発熱が増加するため、古いワイヤーが戻されました。



コンデンサとドライバー自体の間の回路の電流を調べ、次に従って回路を組み立てました。 図17。 結果のグラフは次のとおりです 図18, 「シャギー」は 100 Hz のリップルです (前の 2 つの図と同じ)。 開始パルスが 20 A の値を超えていることがわかります。これはおそらく、コンデンサの並列接続の使用による電源の内部抵抗の低下によるものです。


測定の最後に、ダイオード ブリッジと二次巻線の端子の 1 つの間に 0.1 オームの抵抗を接続して、ダイオード ブリッジを流れる電流を調べました。 のスケジュール 図19モーターがブレーキをかけているとき、電流が 20 A に達することを示しています。 図20– 最大電流の時間延長セクション。


その結果、今のところ、説明した電源を備えたドライバーを使用して作業することにしましたが、「電力が足りない」場合は、より強力な変圧器を探し、ラジエーターにダイオードを取り付けるか、他のものに変更する必要があります。
そしてもちろん、この文章を独断として受け取るべきではありません。他のスキームに従って電源を製造することにまったく障害はありません。 たとえば、変圧器を TS-180、TSA-270 に置き換えたり、コンピューターのパルス電源からドライバーに電力を供給してみることもできますが、おそらく +12 V 回路を供給できるかどうかを確認する必要があります。 25 ~ 30 A の電流で...
アンドレイ・ゴルツォフ、イスキティム
放射性元素のリスト
| 指定 | タイプ | 宗派 | 量 | 注記 | 店 | 私のメモ帳 | |
|---|---|---|---|---|---|---|---|
| 図番号8 | |||||||
| VD1~VD4 | ダイオード | KD2998V | 4 | メモ帳へ | |||
| C1 | コンデンサ | 1.0μF | 1 | 400V | メモ帳へ | ||
| C2 | コンデンサ | 0.47μF | 1 | 160V | メモ帳へ | ||
| C3 | 電解コンデンサ | 2200μF | 15 | 16V | |||
ドライバーのような不可欠なツールがなければ、マスターは建設作業を行うことができますか? 常にどこかで何かを調整したり強化したりする必要があるため、このようなツールを使用せずに本格的な作業を実行することはできません。 家庭におけるドライバーの必要性は、建設および仕上げ作業の一部の段階を大幅に容易にするその機能と能力によって説明されます。
どのドライバーが優れているかわからないかもしれませんが、特にドライバーでネジを締めたことがある人には、そのすべての機能を間違いなく理解していただけるでしょう。 しかし、他の機器と同様に、コードレス ドライバーも時間の経過とともに以前の効率を失い、以前ほどの力で動作しなくなります。 このような問題が発生した場合、どのように解決すればよいでしょうか? もちろん、別のバッテリーを購入することもできますが、新しいバッテリーのコストは高額であるため、職人は代替手段を提供します-ドライバー用の12V電源を自分の手で作成します。 これは状況を打開する優れた方法であり、無線工学の腕を試す絶好の機会です。
準備作業の段階: 建設の準備
バッテリーを作り直す前に、適切なサイズの別の電源ユニットを選択し、既存のケースに入れて固定する必要があります。 用意された装置の内部からすべてを取り出し、外部の内容物とは異なる内部空間を測定します。
工事を始める前に知っておきたいこと
作業工具本体に表示されているマークやデザインを確認し、それに基づいて必要な電源電圧を決定してください。 私たちの場合、ドライバー用の12V電源を自分の手で組み立てるだけで十分です。 必要な定格が 12V 以外の場合は、引き続き交換可能なオプションを探してください。 アナログを選択したら、メーカーはこのパラメータを示していないため、ドライバーの消費電流を計算します。 それを知るには、デバイスの能力を知る必要があります。

デバイスを選択する時間がなく、計算に時間がかかりすぎる場合は、見つけた電源を使用してください。 購入するときは、電流に加えて、バッテリーの容量も確認してください。 自分の手でドライバー用の12V電源を構築するには、1.2Aの容量と2.5の充電量を持つデバイスで十分です。 再充電を行う前に、次の必要なパラメータを決定してください。
- ブロックの寸法。
- 最小電流。
- 必要な電圧レベル。
ドライバー用バッテリーパックの設計プロセス
新しいデバイスと設計に必要なすべての部品を選択したら、作業を開始できます。 自分の手でドライバー用の12V電源を組み立てるには、次の手順を実行します。
- 最適な電源を選択したら、宣言された特性との類似性を確認します。これはどのドライバーによって異なります。 新しいバッテリーの基礎としてコンピューターブロックを使用することをお勧めします。
- ドライバーを分解し、古いドライブを取り外します。 本体が接着されている場合は、縫い目に沿ってハンマーで軽くたたくか、薄いナイフの刃を使用して切り込みを入れます。 こうすることで、最小限のダメージで箱を開けることができます。
- コードとリード線をプラグから外し、他の構造から分離します。
- ドライバーのバッテリー電源が以前配置されていた場所に、ケースから取り出した他の内容物を置きます。
- 電源コードをハウジングの開口部に通します。 所定の位置にはんだ付けして電源に接続します。
- はんだ付けを使用して、コンピューター電源の出力をバッテリー端子に接続します。 極性を忘れずに維持してください。
- 設計されたバッテリーをデバイスに接続してテストします。
- 新しい充電器の寸法が古いバッテリーの寸法を超える場合は、ドライバーのハンドルの内側に充電器を組み込むことができます。
- 並列電源出力を使用してネットワークからバッテリーへの電圧供給を制限するには、出力を含むバッテリーソケット間の「+」ケーブルブレークの内側から必要な電力を供給するダイオードを取り付けますが、「-」極が方向に向くようにします。そのエンジン。

このバッテリーのアップグレードにより何が得られるのでしょうか?
コンピュータの電源を、主電源から継続的に動作するドライバー用のバッテリーに変換すると、次のような多くの利点があります。
- 定期的にデバイスを充電することを心配する必要はありません。
- 長時間稼働時のダウンタイムは最小限に抑えられます。
- 定電流供給によりトルクは一定に保たれます。
- ドライバー用に変換されたコンピューター電源 (12V) を接続しても、デバイスが長期間使用されなかった場合でも、製品の技術的パラメーターにはまったく影響しません。
唯一欠点として挙げられるのは、作業現場の近くにコンセントがあることです。 この問題は延長コードを接続することで簡単に解決できます。

ドライバーをアップグレードするための材料と作業ツール
コンピューターの電源をドライバー用に作り直すことは難しくありません。さらに、このような作業は、特に無線技術の分野の初心者にとって教育的です。 必要なスキルとすべてのコンポーネントがあれば、すぐに変身したコード付きドライバーが完成します。 作業を実行するには、次のものが必要です。
- ドライバーからの充電器。
- 古い工場出荷時のバッテリー。
- 柔らかい多芯電気ケーブル。
- はんだごてとはんだ。
- 酸;
- 絶縁テープ;
- コンピューター (またはその他) からの電源供給。
変換オプション
さまざまな電源オプションを使用して、ドライバーの中断のない動作のためのコンパクトなバッテリーを作成できます。

バッテリーまたはコンピューター機器からの電源
PC またはラップトップの充電をサポートするデバイスは、この目標を達成するのに非常に適しています。 ドライバーに電源を導入するプロセスは次のとおりです。
- ドライバー本体は完全に分解されます。
- 古い電源が取り外され、ワイヤのはんだ付けが外されます。
- 新しいユニットの配線は古いユニットの配線に接続され、以前のバッテリーに電力を供給します。 このような操作を実行するときは、極性を観察することが重要です。
- ドライバーの電源を入れて性能を確認します。 すべてのワイヤーが正しく接続されていれば、機械は動作します。
- デバイスの本体には、充電コネクタ付きのプラグを簡単に配置できる穴があります。 この方法でドライバーをアップグレードすると、改良されたデバイスが得られ、ラップトップのように動作中に 220V ネットワークから充電されるようになりました。
- 新しい電源はドライバーの内側に取り付けられ、接着剤で固定されています。
- 残りのボディ要素は元の位置に戻され、製品はねじれ、元の外観が得られます。
それだけです! コードレスドライバーをコード付きドライバーに変える方法がわかりました。

電源としての車のバッテリー
車のバッテリーは、ドライバーをネットワークにリモート接続するための優れたオプションです。 このアイデアを実装するには、作業ツールからクランプを取り外し、電源に接続するだけです。
重要! このような電源を使用してドライバーを長時間操作することは、あまりお勧めできません。
溶接インバーターを使用してドライバーに電力を供給する
旧設計をリメイクするには、12Vドライバー用の電源回路を用意してください。 古い設計は、2次コイルを追加することである程度改善されました。
コンピューターのバッテリーと比較すると、インバーターの利点がすぐにわかります。 設計機能のおかげで、必要な電圧レベルと出力電流を即座に決定することができます。 これは、無線工学に携わる人々にとって理想的な方法です。
コード付きドライバーの特長
ドライバーを充電するためのモバイル ステーションの作成に基づいて、別の方法を使用してデバイスをネットワーク デバイスに変換できます。 弾性ワイヤーがユニットに接続されており、その一端にはプラグが取り付けられています。 ただし、そのようなステーションを操作するには、特別な電源を構築するか、既製の変圧器を整流器に接続する必要があります。
重要! トランスの特性が機器のパラメータと一致していることを確認することを忘れないでください。

このビジネスに慣れていない場合は、自分の手でコイルを変形するのはおそらく難しいでしょう。 重要なスキルがないと、巻き数や線径の選択を間違える可能性があるため、そのような作業は専門家、または少なくともそのテーマを理解している人に委託することをお勧めします。
機器の 90% は変圧器を内蔵して販売されています。 必要なのは、最適なオプションを選択し、それに対応する整流器を設計することだけです。 整流器ブリッジのはんだ付けには、ツールのパラメータに従って厳密に選択された半導体ダイオードが使用されます。
専門家は、ドライバーを再構築し、自分の手でドライバー用の12V電源を構築することに決めたすべての人に、特定のルールに従うことを推奨しています。 ツールをアップグレードする手順には、次のヒントが含まれています。
- 電池切れを気にせずコード付きドライバーを使い放題です。 ただし、このような楽器には休息が必要です。 したがって、機器の過熱や過負荷を避けるために 5 分間の休憩を取ってください。
- ドライバーを使用して作業するときは、肘の部分にワイヤーを固定することを忘れないでください。 これにより、デバイスの操作がより便利になり、ネジを締めるときにコードが邪魔になりません。
- ドライバーの電源装置に蓄積したほこりや汚れの堆積物を体系的にクリーニングしてください。
- 新しいバッテリーにはアースが付いています。
- ネットワークへの接続に複数の延長コードを使用しないでください。
- このデバイスは、高所作業 (2 メートル以上) での使用はお勧めできません。
これで、12V ドライバーにどのような電源が必要か、自宅でそのようなデザインを作成するにはどのような材料を使用すればよいかがわかりました。 古いドライバーを新しいドライバーに交換する必要はありません。 抜本的な決定は、ユニットが完全に故障しており、バッテリーが「切れた」ことは職人にとって問題ではない場合にのみ行う必要があります。 必要なのは、無線工学を理解し、はんだごてを準備することだけです。 そうすれば、そのタスクに対処するのが簡単になります。
コードレスドライバーを使用したことがある人は、その便利さを高く評価しています。 ワイヤーに絡まることもなく、いつでも手の届きにくい隙間に侵入できます。 それがなくなるまで。
これが最初の欠点です - 定期的な充電が必要です。 遅かれ早かれ再充電サイクルが必要になります。
これが2つ目の欠点です。楽器が安ければ安いほど、この瞬間は早くやって来ます。 購入時にお金を節約するために、私たちは安価な中国製の「無名」デバイスを購入することがほとんどです。
これには何も問題はありませんが、製造業者もあなたと同じくらい節約できることに注意してください。 その結果、最も高価なユニット (これはバッテリー) が、完成時には最も安価になります。 その結果、作動するエンジンと磨耗していないギアボックスを備えた優れたツールが得られましたが、バッテリーの品質が悪いために作動しませんでした。
新しいバッテリーセットを購入するか、ユニット内の故障したバッテリーを交換するオプションがあります。 ただし、これは予算のかかるイベントです。 コストは購入と同等です。

2 番目のオプションは、予備または古い車のバッテリー (ある場合) を使用することです。 しかし、スターターバッテリーは重いので、このようなタンデムの使用はあまり快適ではありません。
重要! 多くのドライバーの動作電圧は 16 ~ 19 ボルトです。 完全に充電された車のバッテリーでも、そのような電圧は得られません。 使用済みのバッテリーを使用することを意味しており、端子の電圧は最大 10.5 ~ 11.5 ボルトになる可能性があります。
解決策はあります - ドライバーをネットワークドライバーに変換することです
はい、これではコードレスツールの利点の 1 つである機動性が失われます。 ただし、220 ボルトのネットワークにアクセスできる部屋で作業する場合、これは優れたソリューションです。 さらに、壊れた楽器に新たな命を吹き込むことになります。
コードレスドライバーをコード付きドライバーに変える方法には 2 つの概念があります。
- 外部電源。 このアイデアは、思われるほどばかげたものではありません。 大きくて重い降圧整流器でも、コンセントの近くに置くだけで済みます。 あなたは、電源と差し込まれた電源プラグに等しく結びついています。 また、低電圧コードは任意の長さで作ることができます。
- ケース内の電源はバッテリーから供給されます。 モバイル性は維持され、制限されるのはネットワーク ケーブルの長さだけです。 唯一の問題は、十分に強力なトランスを小さなパッケージにどのように詰め込むかです。 市販の小型ドライバーが主電源からどのように機能するかについて質問する必要はありません。 当初は 220 ボルトのモーターが設置されていました。 オームの法則をもう一度思い出して、強力な 220 ボルトの電気モーターがコンパクトになり得ることを理解しましょう。
重要! オームの法則によれば、同じ電力の場合、電圧を下げると電流が増加します。
したがって、12 ~ 19 ボルトの電源コードは 220 ボルトの電源コードよりも大きな断面積を持つ必要があります。
特定の作業に適したドライバーを選択するときは、さまざまな特性に注意を払う必要があります。 その中で最も重要なのは、デバイスの電力とバッテリーの容量だけでなく、バッテリーの電圧、さらにはトルク値です。
建設や修理作業を行う際、ドライバーはさまざまな種類の留め具の締め付けや、場合によっては穴開けを簡単に行うために不可欠なツールです。 そして、このデバイスには主電源とバッテリー駆動の2つのバージョンがあるという事実にもかかわらず、家事を実行するために後者のオプションが選択されることがよくあります。 同時に、電動工具自体のパラメータや、ドライバーの電圧、パワー、トルク、バッテリー容量などの特性にも注意が払われます。 これらの指標はそれぞれ、正しいデバイスを評価して選択するために重要です。 一方、適切な電力や電圧だけに基づいて購入する価値はありません。
バッテリーとツール自体の基本パラメータ
ドライバーの操作を特徴付ける主なパラメータはバッテリー電圧であり、バッテリー電圧によって電動モーターの出力とトルクが決まります。 家庭用モデルの場合、ドライバー間の電圧の差は小さく、平均して 10.8 ~ 14.4 V の範囲内です。常時使用を目的としたより生産的なオプションには、24 ~ 36 ボルトのバッテリーを装備できます。
ドライバーのバッテリー電圧はバッテリーの種類によっても異なります。どのような金属が使用されているかを知ることで、違いが何であるかを知ることができます。 同様の容量でサイズが大きいニッケルカドミウム電池の場合、インジケーターの値は1.2 Vの倍数(これは電池パックを構成する1つの要素の電圧です)、リチウムイオン電池の場合は3.6 Vです。
他にも同様に重要な特性は次のとおりです。
- ドライバーの力。ねじやタッピンねじを締める速度を決定するためにも使用できます。 自分で修理する場合は500~700Wの性能を持つモデルで十分です。 プロの修理工には、より強力な機器 - 800 ~ 850 W が必要です。
- 装置の回転部分の単位時間当たりの回転数。 このパラメータは、ドライバーが割り当てられたタスク (たとえば、必要なタイプの留め具を締めるなど) を実行できるかどうかを決定します。 したがって、ボルト、タッピングネジ、ネジの場合は500 rpmで十分ですが、穴あけの場合は1200 rpmが必要です。
- トルクの値は、ドライバーのバッテリーの電圧がどのような影響を与えるかという質問に対する主な答えの 1 つとなります。 この特性を利用して、ねじ込まれているねじまたはセルフタッピンねじの直径と長さの両方を決定できます。 大型のファスナーや、深くて広い穴や硬い材料の穴あけには、かなりのトルクが必要です。 インジケーターの最大値は 10 ~ 60 Nm です。
ドライバーのトルクには 2 種類あります。始動時 (大きさが大きく、デバイスを動作させるために必要です) と一定、つまり作動時です。 最新の機器モデルのパラメータ値は調整できます。特定のデバイスで選択できるモードの数は、そのデバイスで利用可能なドキュメントで確認できます。 さらに、パルス動作モード(回転部分を急激に回転させる)を備えたツールは、より多くのねじ込み能力を備えており、定期的にトルクを増加させることができ、より大きなねじをねじ込むことができます。
電気モーターの出力トルク値は一定ではなく、まずモーターの速度に依存します。速度が高くなるほど、シャフトにかかるトルクは低くなります。
ドライバーの電圧と電力に加えて、バッテリー容量も評価する必要があります。 特性はアンペア時またはミリアンペア時で測定されます。 インジケーターが高いほど、ドライバーが再充電せずに長く動作できることを示します。
家庭用モデルの平均バッテリー容量は 1300 mAh で、2 ~ 3 時間の動作には十分です。 プロ仕様の機器では、作業を完了するまでにさらに時間がかかります。作業日中ドライバーを使用するマスターは、1.5 ~ 2.0 Ah のバッテリーを搭載したモデルを購入する必要があります。
選べる機能
パワーを選択するときは、メーカーからの情報に示されているドライバーのパワーだけを考慮する必要があります。 生産性が高すぎるため、デバイスはネジをきつく締めすぎて、ネジの頭を表面に押し込む可能性があります。 その結果、コーティングの外観が悪化し、必要に応じて留め具を緩めることがほとんど不可能になります。 
ドライバーに最適な電圧を選択するときは、電圧がデバイスの主なパラメータであることを考慮する必要があります。 たとえば、マキタ DDF343SHE ドライバーのモーター出力は 700 W、電圧 14.4 V、バッテリー容量 1300 mAh、トルク 36 Nm です。 他のモデルの Hammer ACD182 はエンジンが弱く (22 Nm)、バッテリーの容量が少なく (1200 mAh) あり、このデバイスは約 40% 弱いようです。 しかし、ハマーは 18 V の電圧により、充電せずにより多くの留め具を締めることができ、バッテリー容量の点では競合他社に劣っています。
一見すると生産性が低いように見えるドライバーが、より強力なドライバーに比べて劣っている理由は、少し計算してみると理解できます。
- 最初のモデルが蓄えるエネルギー量は 1.2 x 1.8 = 21.6 Wh です。
- 2 番目の指標は 1.3 x 14.4 = 18.72 Wh のみです。 15.4%減。
ドライバーを選ぶときは、付属の予備バッテリーの有無を考慮することをお勧めします。 一部のモデルには追加のバッテリーが 2 つ付いています。 一方で、そのような機器はより高価になります(特にバッテリーのコストが機器の価格の最大80%であるため)が、それを使用するとはるかに便利になります。 同時に、家事を行うために追加のバッテリーは必要ありません。その助けを借りて実行される作業時間が1〜2時間を超えることはほとんどありません。 ドライバーを継続的に使用している間 (修理作業や家具の組み立てなど)、2 番目のバッテリーを使用すると、数分以上作業を中断することがなくなります。 放電したバッテリーを充電し、予備バッテリーを装置に装着します。

ドライバーを必要とするような長時間の作業が必要ない場合は、コストが高くなるだけでなく、追加のバッテリーを備えたモデルを購入することはお勧めできません。 ただ、そのようなバッテリーの耐用年数は短く、数年後には古いバッテリーの寿命の半分も使い切ることなく新しい部品を購入する必要があります。
要約する
記事を要約すると、ドライバーのバッテリー電力は、適切なモデルを選択する際の重要なパラメーターではありますが、電圧と容量のインジケーターの方がはるかに重要であることに注意する価値があります。 そして、ほとんどの場合、ねじ込むだけでなくドリルにも使用される場合にのみ、トルクに注意を払う価値があります。 また、市販されているすべてのモデルのコードレス ドライバーの最大出力は、電圧 36 V、トルク 60 Nm、容量 3000 mAh のデバイスであることも知っておく必要があります。 このような機器は非常に難しく、専門的な経験がなければ使用するのがあまり便利ではありません。 これは、ボッシュ、日立、マキタ、AEG、デウォルト、メタボなどの有名で信頼できるブランドが製造した、生産性の低いオプションを選択する必要があることを意味します。
ビデオ: ドライバーはどのようなものであるべきか。 力