Надіслати свою гарну роботу до бази знань просто. Використовуйте форму нижче
Студенти, аспіранти, молоді вчені, які використовують базу знань у своєму навчанні та роботі, будуть вам дуже вдячні.
Розміщено на http://www.allbest.ru/
Вступ
Зростаючи кількість автомобілів, і як наслідок збільшення їх числа на дорогах великих міст ставати все більш і більш важливою проблемою на сьогоднішній день. Велике скупчення центрів тяжіння людських мас у центрі більшості мегаполісів веде до ускладнення управління УДС та подорожчання її змісту. Багато міст світу не справляються з щоденними транспортними викликами і стоять у багатокілометрових пробках з кожним днем.
При цьому потреба населення в транспортному забезпеченні продовжує зростати. Отже, без належних заходів ситуація рухається до тупикового фіналу. УДС спроектовані під менше навантаження не справляються і потребують модернізації та оптимізації. На сьогоднішній день місту потрібні не тільки хороші, грамотно змодельовані, а потім збудовані дороги, а й їхнє якісне управління. Так само багато в чому, колишні способи керування дорожнім рухом старіють, і не встигають за містом, що зростає, а різноспрямованість потоків вимагає динамічного управління та інтеграції інноваційних систем для поліпшення транспортної обстановки, і зокрема в Москві. Вся система будівництва УДС та її управління потребує зміни за допомогою нових технологій, у тому числі й математичного моделювання, що дозволяє прогнозувати поведінки УДС, вносити коригування в її конфігурацію та багато іншого. Саме тому різко зростає потреба в альтернативних, а також у будь-яких додаткових джерелах інформації про стан дорожнього руху. Вже сьогодні впроваджуються нові комплекси та системи зі збору та обробці даних.
У першому розділі наводиться короткий аналіз транспортної ситуації, що склалася в місті Москві, аналіз отримання та використання метричних даних автомобілів за допомогою сервісу «Яндекс.Пробки», проведений аналіз корисності таких даних та можливості їх використання. Наприкінці глави наведено теоретичні відомості про дороги, їх класифікацію, а також про те, що таке транспортні потоки та їх основні характеристики, а також проведена постановка задачі
У другому розділі зроблено вибір «піддослідної» ділянки УДС, розглянуто її основні проблеми за допомогою теплової карти «Яндекс.Пробки», а також виходячи з постановки завдання, запропоновано заходи щодо покращення транспортної обстановки на даній ділянці УДС.
У третьому розділі викладено докладне обґрунтування запропонованих змін за допомогою комп'ютерного моделювання та порівняння двох моделей УДС та їх параметрів. Створено комп'ютерну модель на основі реально обраної ділянки, проаналізовано проблеми та дані, після чого створено комп'ютерну модель із внесеними змінами, запропонованими у другому розділі. Проведено порівняльний аналіз даних двох моделей, що дозволяє зробити висновок про те, що внесені зміни призведуть до поліпшення руху на цій ділянці.
Об'єктом дослідження є транспортні потоки на вулично-дорожній мережі міст.
Предметом дослідження є можливість використання комп'ютерного моделювання на вирішення реальних практичних завдань.
Наукова гіпотеза полягає в припущенні про можливість застосування реальних даних у комп'ютерній моделі, з подальшою її (моделі) модернізацією, та отримання результатів поліпшення, які з високою ймовірністю є достовірними та застосовними на практиці.
Метою дослідження є розгляд однієї з проблемних радикальних магістралей Москви, створення її комп'ютерної моделі, порівняння поведінки моделі з картиною на практиці, внесення покращень та змін до структури УДС та подальше моделювання зміненої УДС, з метою підтвердження покращення обстановки на цій ділянці.
Достовірність результатів проведених у роботі досліджень забезпечується експериментальним підтвердженням основної гіпотези, узгодженістю результатів теоретичних досліджень, одержуваних виходячи з аналізу розроблених математичних моделей до розрахунку основних параметрів УДС, з результатами проведених досліджень.
1 Аналіз поточного положення та постановка задачі
1.1 Обґрунтування актуальності проблеми
Ні для кого не секрет, що багато великих мегаполісів світу зазнають величезних проблем у транспортній сфері. Транспорт у мегаполісі відіграє величезну сполучну роль, саме тому транспортна система мегаполісу має бути збалансованою, легко керованою та швидко реагує на всі зміни в трафіку руху в межах міста. Фактично, мегаполіс це міська агломерація з величезною концентрацією машин і людей, в якій автомобільний транспорт (особистий та громадський) відіграє величезну роль, як у переміщенні самого населення, так і у загальній логістиці. Саме тому грамотне керування транспортною системою мегаполісу відіграє величезну роль у його діяльності.
З кожним днем зростає потреба населення у транспортному забезпеченні як за допомогою громадського транспорту, так і особистих автомобілів. Логічно припустити, що зі збільшенням кількості транспорту в мегаполісі має пропорційно зростати кількість доріг, розв'язок і паркінгів, проте розвиток вулично-дорожньої транспортної мережі (УДС) не встигає за темпами автомобілізації.
Нагадаємо, що за даними статистики, кількість автомобілів на душу населення неухильно зростає (Малюнок 1.1).
автомобільний транспортний потік комп'ютерний
Малюнок 1.1 Кількість автомобілів на 1000 чоловік у Москві
При цьому УДС Москви не готові до таких темпів зростання автомобілізації в місті. Крім особистого транспорту у місті, має бути вирішена проблема громадського транспорту та пасажироперевезень у Москві. За даними державної транспортної програми всього 26% пасажиропотоку припадає на особистий транспорт і 74% на транспорт громадський. При цьому загальний річний обсяг перевезень у 2011 р. становив 7.35 млрд. пасажирів, і за прогнозами зростатиме, і в 2016 році становитиме до 9.8 млрд. пасажирів на рік. При цьому планується, що лише 20% від цієї кількості пасажирів використовуватимуть особистий транспорт. При цьому сумарно на особистий та надземний громадський транспорт припадає понад половина пасажироперевезень у Москві. Це означає, що вирішення проблем автомобільного транспорту у мегаполісі відіграє велику роль для його нормального функціонування та комфортного проживання його мешканців. Ці дані означають, що без вживання адекватних заходів до поліпшення транспортної обстановки в Москві наш чекає транспортний колапс, який повільно назріває в Москві останні роки.
Також варто зауважити, що крім проблем пов'язаних з внутрішньоміським переміщенням пасажирів, чітко видно проблему транспортних потоків маятникової трудової міграції, і потоку автотранспорту (переважно вантажного), що йде крізь місто. І якщо проблема транзитного вантажного транспорту частково вирішується, шляхом заборони на в'їзд і переміщення в денний час у межах міста вантажівок вантажопідйомністю понад 12 тонн, то проблема переміщення пасажирів з області в межу набагато глибша і важка у своєму рішенні.
Цьому сприяють кілька факторів, насамперед розташування центрів тяжіння людських мас у межах міста. Зокрема розташування величезної кількості робочих місць та офісів великої кількості компаній, розташування великої кількості об'єктів інфраструктури, культури та обслуговування (зокрема торгових центрів, проте тенденція до їх будівництва у межах неухильно знижується на користь їх розташування за МКАДом). Все це призводить до того, що величезні людські потоки щодня в ранковий час пік переміщаються з області в межах міста і у вечірній час тому, в область. Особливо гостро ця проблема стоїть у будні, коли величезна кількість людей у ранковий час пік поспішають на роботу, а у вечірній додому. Все це призводить до колосального навантаження для вильотних магістралей, що використовуються в цей час величезною кількістю пасажирів, що переміщаються як громадським транспортом, так і особистим. Крім того, в літній період до них додаються дачники, кожні вихідні створюють величезні затори на магістралях в область, а після вихідних з неї.
Всі ці проблеми вимагають негайного вирішення шляхом будівництва нових доріг і розв'язок, перенесення центрів тяжіння людських мас та оптимізації управління вже існуючою структурою УДС. Всі ці рішення просто не можливі без ретельного планування та моделювання. Так як за допомогою прикладних програм і засобів моделювання ми можемо побачити, якого ефекту ми зможемо досягти, наводячи в життя ті чи інші рішення, і вибирати найбільш відповідні виходячи з їхньої вартісної оцінки та позитивного ефекту впливу на УДС.
1.2 Аналіз поточного транспортного стану в Москві за допомогою веб-сервісу Яндекс Пробки
Розглядаючи детальніше проблеми, викладені вище, ми маємо звернутися до існуючих телеметричних систем збору інформації про транспортну обстановку в Москві, яка б могла наочно показати проблемні зони нашого мегаполісу. Однією з найбільш просунутих та корисних систем у цій галузі, що зарекомендувала себе своєю ефективністю, є веб-сервіс «Яндекс Пробки», що доказав свою ефективність та інформативність.
Аналізуючи дані, що надаються сервісом у відкритому доступі, ми можемо провести аналіз даних та надати фактичне обґрунтування проблем викладених вище. Таким чином, ми можемо наочно побачити зони з напруженою транспортною обстановкою, наочно розглянути тенденції до утворення заторів та запропонувати вирішення проблеми шляхом вибору найбільш оптимальної математичної моделі для вирішення задачі моделювання конкретної проблемної галузі, з подальшим отриманням результатів на підставі яких можна зробити висновки щодо можливості покращення транспортної обстановки у цьому конкретному випадку. Таким чином, ми можемо поєднати теоретичну модель та реальну проблему, надавши її вирішення.
1.2.1 Коротка довідка про веб-сервіс «Яндекс пробки»
Яндекс пробки - веб-сервіс, що займається збором та обробкою інформації про транспортну ситуацію в Москві та інших містах Росії та світу. Аналізуючи отриману інформацію, сервіс надає інформацію про транспортну обстановку (а для великих міст ще й виставляє «бал» завантаженості транспортної мережі), дозволяючи автомобілістам правильно скласти маршрут поїздки та оцінити передбачуваний час у дорозі. Так само сервіс надає короткостроковий прогноз про передбачувану транспортну обстановку в конкретний час, у конкретний день тижня. Таким чином, сервіс частково бере участь у оптимізації ТП, дозволяючи водіям вибирати маршрути об'їзду, не охоплені затором.
1.2.2 Джерела даних
Для наочності уявімо, що ми з вами - ДТП на Страсному бульварі перед Петрівкою (невелике і без жертв). Своєю появою ми перегородили, припустимо, два ряди з трьох. Автомобілісти, які рухалися нашими рядами, змушені об'їжджати нас, а водії, які переміщалися по третьому ряду, - пропускати тих, хто об'їжджає. Деякі з цих автомобілістів - користувачі додатків Яндекс.Карти та Яндекс.Навігатор, та їх мобільні пристрої передають Яндекс.Пробкам дані про рух автомобіля. У міру наближення машин користувачів до нашої ДТП їхня швидкість буде зменшуватися, і пристрої почнуть «повідомляти» сервіс про затор.
Щоб брати участь у зборі даних, автомобілістові необхідний навігатор та мобільний додаток «Яндекс.Пробки». Наприклад, якщо на дорозі станеться ДТП, то якийсь свідомий водій, побачивши нашу ДТП, може попередити про нього інших автолюбителів, поставивши відповідну точку в мобільних Яндекс.Картах.
1.2.3 Технологія обробки треків
GPS-приймачі допускають похибки при визначенні координат, що ускладнює побудову треку. Похибка може «змістити» автомобіль на кілька метрів у будь-який бік, наприклад, на тротуар або дах поруч будівлі, що стоїть. Координати, що надходять від користувачів, потрапляють на електронну схему міста, де дуже точно відображені всі будівлі, парки, вулиці з дорожньою розміткою та інші міські об'єкти. Завдяки цій деталізації програма розуміє, як насправді рухався автомобіль. Наприклад, у тому чи іншому місці машина не могла виїхати на зустрічну смугу або поворот був здійснений по дорожній розмітці, не зрізуючи кут. (Малюнок 1.2)
Рисунок 1.2 Технологія обробки треків
Отже, що більше користувачів у сервісу, то точніша інформація про дорожню ситуацію.
Після об'єднання перевірених треків алгоритм аналізує їх та виставляє «зелені», «жовті» та «червоні» оцінки відповідним ділянкам доріг.
1.2.4 Об'єднання даних
Далі відбувається агрегація - процес об'єднання інформації. Кожні дві хвилини програма-агрегатор збирає як мозаїку інформацію, отриману від користувачів мобільних Яндекс.Карт в одну схему. Ця схема відображається на шарі "Пробки" (Малюнок 1.3) Яндекс.Карт - і в мобільному додатку, і на веб-сервісі.
Малюнок 1.3 Відображення пробок у Яндекс.Картах
1.2.5 Шкала балів
У Москві, Санкт-Петербурзі та інших великих містах сервіс Яндекс.Пробки оцінює ситуацію за 10-бальною шкалою (де 0 балів – вільний рух, а 10 балів – місто «коштує»). За допомогою цієї оцінки водії можуть швидко зрозуміти, скільки приблизно часу вони втратять у пробках. Наприклад, якщо середній бал по Києву дорівнює семи, то дорога займе приблизно вдвічі більше часу, ніж за вільного руху.
Шкала балів налаштована по-різному для кожного з міст: те, що в Москві – невелика скрута, в іншому місті – вже серйозна пробка. Наприклад, у Санкт-Петербурзі за шести балів водій втратить приблизно стільки ж часу, скільки в Москві вже за п'ять. Бали розраховуються так. По вулицях кожного міста заздалегідь складені маршрути, що включають основні шосе і проспекти. Для кожного маршруту є еталонний час, за який його можна проїхати вільною дорогою, не порушуючи правил. Після оцінки загальної завантаженості міста програма-агрегатор розраховує, наскільки відрізняється реальний час від еталонного. На основі різниці по всіх маршрутах обчислюється завантаженість у балах. (Малюнок 1.4)
Малюнок 1.4 Узагальнена схема роботи порталу Яндекс.Пробки
1.3 Використання інформації, отриманої за допомогою веб-сервісу ЯндексПробки для знаходження проблемних зон в УДС
Узагальнюючи отриману інформацію, ми можемо дійти висновку про те, що сервіс надає дуже корисну інформацію (як режим онлайн, так і в режимі прогнозу) про транспортну обстановку в Москві та інших регіонах, яку можна використовувати в наукових цілях, зокрема для ідентифікації проблемних зон, вулиць та магістралей, прогнозування заторів. Таким чином, ми можемо виявити первинні проблеми як у всій УДС загалом, так і на окремих її ділянках, обґрунтувати існування тих чи інших транспортних проблем в УДС шляхом аналізу інформації, отриманої за допомогою даного веб-сервісу. З даних первинної аналітики, ми можемо побудувати первинну картину труднощів на УДС. Потім, використовуючи вже засоби моделювання та конкретні дані підтвердити чи спростувати наявність тієї чи іншої проблеми, а потім спробувати побудувати математичну модель УДС із внесеними до неї змінами (змінити фази світлофора, змоделювати нову розв'язку на проблемній ділянці тощо) та запропонувати варіант (и) поліпшення ситуації на заданій ділянці. Після чого вибрати найбільш відповідне з точки зору співвідношення ефективності та вартісної оцінки рішення.
1.4 Пошук та класифікація проблем за допомогою веб-сервісу Яндекс.Пробки
Даний веб-сервіс можна розглядати як один із методів покращення управління дорожнім рухом (далі УДД) у Москві. На основі інформації порталу ми постараємося оцінити проблемні зони в УДС Москви та запропонувати системні рішення щодо покращення УДД, а також виявити тенденції до утворення заторів.
Розглядаючи дані порталу, ми маємо провести добову аналітику зміни завантаженості доріг у Москві та виявити найбільш проблемні зони. Найбільш підходящим для цих цілей є годинник пік, коли навантаження на УДС максимальне.
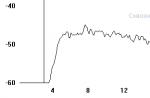
Рисунок 1.5 Середня завантаженість основних радіальних магістралей Москви щогодини у робочі дні
Для підтвердження гіпотези про перевантаженість УДС та наявність проблеми трудової маятникової міграції ми проведемо аналіз даних як загального ген. плану Москви з нанесеним «шаром» пробок, і окремих проблемних ділянок і розглянемо динаміку їх руху.
Переважна більшість робочих місць у Москві починає трудову діяльність в 8-00 - 10-00 за Московським часом, відповідно до трудового кодексу тривалість робочого дня при п'ятиденному робочому тижні (найпоширеніший варіант) становить 8 годин, таким чином ми можемо припустити, що основне навантаження на УДС, відповідно до гіпотези про маятникову трудову міграцію (МТМ) повинні припадати на відрізки часу, в ранкові години: з 6-00 (область - МКАД) і до 10-00 (ближче до основних місць зосередження робочих місць у Москві) ) та з 16-00 - 18-00 (центр) до 20-00 (радіальні магістралі на виліт) у вечірні.
Малюнок 1.6 О 6-00 труднощів на УДС немає
Малюнок 1.7 Наявність труднощів під час під'їзду до Москви
Виходячи з аналітики, о 7-00 ми маємо складнощі на під'їзді до міста на основних радикальних магістралях до центру.
Рисунок 1.8 Труднощі на півдні Москви
Рисунок 1.9 Труднощі на південному заході
Схожа картина спостерігається на всіх радіальних магістралях столиці. Максимального балу вранці було досягнуто о 9:56 за московським часом, затори на той час перемістили з околиць міста до його центру.
Малюнок 1.10 9-00 - 9-56 ранковий пік навантаження на УДС
Малюнок 1.11 ТТК о 16-00
Поліпшення транспортної обстановки загалом спостерігалося до 15-40 по МСК., обстановка « у центр» погіршень мала до кінця дня. Загальна ситуація мала тенденції до початку погіршень з 16-00, поліпшення ж ситуації почалися приблизно з 20-00 по МСК. (Додаток А). У вихідні проблеми на УДС практично не спостерігаються, а по градації порталу Яндекс.Пробки «балл» не перевищив «3» за весь час добового спостереження. Таким чином, ми з упевненістю можемо констатувати перевантаженість міста внаслідок зосередження центрів тяжіння людських мас (робочих місць) у його центрі, та значно кращу картину у вихідні дні, коли проблема МТМ відсутня.
Роблячи проміжні висновки, ми можемо з упевненістю сказати, що основним напрямом роботи має стати скорочення числа центрів тяжіння людських мас у центрі міста та обмеження проїзду до цієї зони, а також збільшення пропускної спроможності основних радіальних магістралей. Вже зараз урядом Москви робляться кроки в цьому напрямку шляхом введення платного паркування в центрі Москви та введення пропускної системи в'їзду до центру міста транспортних засобів (далі ТЗ) загальною масою понад 3.5 тонни.
Малюнок 1.12 Зона платного паркування у Москві
Аналізуючи отримані ми можемо зробити висновок про те, що дорожні труднощі мають односпрямований формат у будні дні та однакову динаміку початку та кінця (вранці з області, поступово зміщуючись у центр міста, і навпаки у вечірні - з центру у напрямку в область).
Отже, розглядаючи цю тенденцію, ми можемо зробити висновок у тому, що запровадження динамічного управління УДС життєво необхідно, оскільки завантаженість доріг має односпрямований характер. За допомогою інтелектуальних систем ми можемо змінювати пропускну здатність дороги в тому чи іншому напрямку (наприклад, за допомогою смуги реверсивного руху «включаючи» її у бік, що має недостатню пропускну здатність), змінювати та підлаштовувати фази світлофорів для досягнення максимальної пропускної спроможності на ділянках із утрудненнями . Такі системи та способи набувають все більшого поширення (наприклад, реверсивна смуга на Волгоградському проспекті). Водночас «сліпо» збільшувати пропускну спроможність проблемних ділянок не можна, оскільки ми можемо просто відсунути затор до першого місця з недостатньою пропускною спроможністю. Тобто рішення транспортних проблем має нести комплексний характер, а моделювання проблемних ділянок не повинно відбуватися у відриві від усієї системи УДС і проводитися комплексно. Таким чином, однією з цілей нашої роботи має стати моделювання та оптимізація однієї із проблемних радіальних магістралей Москви.
1.5 Теоретичні відомості
1.5.1 Класифікація доріг у Росії
Постановою Уряду Російської Федерації від 28 вересня 2009 року N 767 затверджено Правила класифікації автомобільних доріг у Російській Федерації та їх віднесення до категорій автомобільних доріг.
Автомобільні дороги за умовами руху та доступу до них поділяються на такі класи:
· Автомагістраль;
· Швидкісна автомобільна дорога;
· Звичайна автомобільна дорога (не швидкісна автомобільна дорога).
1.5.2 Автомобільні дороги, залежно від розрахункової інтенсивності руху
Відповідно до СНиП 2.05.02 - 85 станом на 1 липня 2013 року поділяються на такі категорії (таблиця 2):
Таблиця 2
|
Розрахункова інтенсивність руху, наведених од./добу. |
|||
|
IА (автомагістраль) |
|||
|
IБ (швидкісна дорога) |
|||
|
Звичайні дороги (нешвидкісні дороги) |
|||
|
Св. 2000 до 6000 |
|||
|
Св. 200 до 2000 |
|||
1.5.3 Основні параметри ТП та їх взаємозв'язок
Транспортний потік (ТП) - це сукупність транспортних засобів, які одночасно беруть участь у русі на певній ділянці вулично-дорожньої мережі
Основними параметрами транспортного потоку є:
швидкість потоку?, Інтенсивність потоку л, щільність потоку с.
Швидкість? транспортного потоку (ТП) прийнято вимірювати у км/год чи м/с. Найчастіше застосовують одиницю виміру км/год. Швидкість потоку вимірюють у двох напрямках, а на багатосмуговій дорозі швидкість вимірюють у кожній смузі. Для вимірювання швидкості потоку на дорозі проводять перерізи. Перетин дороги є лінією, перпендикулярною осі дороги, що проходить через її ширину. Швидкість ТП вимірюють на ділянці або перерізі.
Ділянка є відрізок дороги, укладений між двома перерізами. Відстань L м між перерізами вибирають таким чином, щоб забезпечити прийнятну точність вимірювання швидкості. Вимірюють час t, з проходження автомобілем ділянки - часовий інтервал. Вимірювання проводять для заданого числа n автомобілів та обчислюють середній часовий інтервал?
Обчислюють середню швидкість дільниці:
V = L/?.
Тобто, швидкість транспортного потоку є середньою швидкістю автомобілів, що рухаються в ньому. Для вимірювання швидкості ТП у перерізі використовують дистанційні вимірювачі швидкості (радар, лампа – фара) або спеціальні детектори швидкості. Вимірюють швидкості V для n автомобілів та обчислюють середню швидкість на ділянці:
Використовують такі терміни:
Середня тимчасова швидкість V – середня швидкість руху автомобілів у перерізі.
Середня просторова швидкість? - Середня швидкість проїзду автомобілями значної ділянки дороги. Вона характеризує середню швидкість транспортного потоку дільниці деякий час доби.
Час поїздки - час, потрібний автомобілю на проходження одиниці довжини дороги.
Сумарний пробіг - це сума всіх шляхів автомобілів на ділянці дороги за заданий інтервал часу.
Також швидкість руху можна підрозділити на:
Миттєву Va - швидкість, що фіксується в окремих типових перерізах (крапках) дороги.
Максимальну Vм – найбільша миттєва швидкість руху, яку може розвинути транспортний засіб.
Інтенсивність руху л дорівнює кількості автомобілів, що проходять переріз дороги за одиницю часу. При високих інтенсивностях руху використовує коротші інтервали часу.
Інтенсивність руху вимірюється шляхом підрахунку числа n автомобілів, що проходять через переріз дороги за задану одиницю часу T, після чого обчислюють часткове л = n/T.
Додатково використовують такі терміни:
Обсяг руху - кількість автомобілів, що перетнули перетин дороги в задану одиницю часу. Об'єм вимірюється числом автомобілів.
Часовий обсяг руху - кількість автомобілів, що пройшли через перетин дороги протягом години.
Щільність із транспортного потоку дорівнює числу автомобілів, розташованих на ділянці дороги заданої довжини. Зазвичай використовуються ділянки розміром 1 км, одержують густину автомобілів на кілометр, іноді використовують більш короткі ділянки. Щільність зазвичай розраховують за швидкістю та інтенсивністю руху транспортного потоку. Однак густину можна виміряти експериментально, використовуючи аерофотозйомку, вежі або високі будівлі. Використовують додаткові параметри, що характеризують густину транспортного потоку.
Просторовий інтервал або коротко інтервал lп, м - відстань між передніми бамперами двох, що йдуть один за одним, автомобілів.
Середній просторовий інтервал lп.ср – середнє значення інтервалів lп на ділянці. Інтервал lп.ср вимірюють у метрах на один автомобіль.
Просторовий інтервал l п.ср м легко розрахувати, знаючи щільність с, авт./км потоку:
1.5.4 Взаємозв'язок між параметрами транспортного потоку
Співвідношення між швидкістю, інтенсивністю та щільністю потоку називається основним рівнянням транспортного потоку:
V?с
Основне рівняння пов'язує між собою три незалежні змінні, які є середніми значеннями параметрів транспортного потоку. Однак у реальних дорожніх умовах змінні пов'язані між собою. При збільшенні швидкості транспортного потоку інтенсивність руху спочатку зростає, досягає максимуму, а потім знижується (Малюнок 1.13). Зниження обумовлено збільшенням інтервалів lп між автомобілями та зниженням щільності транспортного потоку. При великій швидкості автомобілі швидко проходять ділянки, але розташовані далеко один від одного. Метою управління рухом є досягнення максимальної інтенсивності потоку, а чи не швидкості.
Малюнок 1.13 Взаємозв'язок між інтенсивністю, швидкістю та щільністю ТП: а) залежність інтенсивності ТП від швидкості; б) залежність густини ТП від швидкості
1.6 Методи та моделі транспортного моделювання
Математичні моделі, що використовуються для аналізу транспортних мереж, можна класифікувати, ґрунтуючись на функціональній ролі моделей, тобто на тих завданнях, у вирішенні яких вони застосовуються. Умовно серед моделей можна виділити 3 класи:
· Прогнозні моделі
· Імітаційні моделі
· Оптимізаційні моделі
Прогнозні моделі використовуються тоді, коли відома геометрія та характеристики УДС та розміщення потокоутворюючих об'єктів у місті, і потрібно визначити, якими будуть транспортні потоки в цій мережі. Детально, прогноз завантаження УДС включає розрахунок середніх показників руху, таких як обсяги міжрайонних переміщень, інтенсивність потоку, розподіл пасажиропотоків і т.д. За допомогою таких моделей можна прогнозувати наслідки змін у транспортній мережі.
На відміну від прогнозних моделей, імітаційне моделювання має на меті змоделювати всі деталі руху, включаючи розвиток процесу у часі.
Цю відмінність можна сформулювати дуже просто, якщо прогнозне моделювання відповідає питанням «скільки й куди» переміщатимуться ТЗ у мережі, а імітаційні моделі відповідають питанням у тому, як детально відбуватиметься рух, якщо відомо «скільки й куди». Таким чином, ці два напрями транспортного моделювання взаємодоповнюють. З вище сказаного випливає, що до класу імітаційних моделей за їх цілями і завданнями, що виконуються, можна віднести широкий спектр моделей, відомих під назвою моделі динаміки транспортного потоку.
Для динамічних моделей характерна деталізація опису руху. Область практичного застосування таких моделей - поліпшення організації руху, оптимізація світлофорних фаз тощо.
Моделі прогнозу потоків та імітаційні моделі ставлять основною метою наближене до реального відтворення поведінки транспортних потоків. Також існує велика кількість моделей призначених для оптимізації функціонування транспортних мереж. У цьому вся класі моделей вирішуються завдання оптимізації маршрутів пасажирських перевезень, вироблення оптимальної конфігурації транспортної мережі тощо.
1.6.1 Динамічні моделі транспортного потоку
Більшість динамічних моделей транспортних потоків умовно можна поділити на 3 класи:
· Макроскопічні (гідродинамічні моделі)
· Кінетичні (газодинамічні моделі)
· Мікроскопічні моделі
Макроскопічними моделями називають моделі, що описують рух автомобілів у усереднених термінах (щільність, середня швидкість та інші). У таких моделях транспортних потік подібний до руху рідини, тому такі моделі називають гідродинамічними.
Мікроскопічними моделями є моделі, в яких явно моделюється рух кожного автомобіля.
Проміжне місце займає кінетичний підхід, у якому транспортний потік описується як щільність розподілу автомобілів фазовому просторі. p align="justify"> Особливе місце в класі мікромоделей займають моделі типу клітинних автоматів, завдяки тому, що в даних моделях прийнято сильно спрощене дискретне в часі і просторі опис рух автомобілів, через це досягається висока обчислювальна ефективність даних моделей.
1.6.2 Макроскопічні моделі
Перша з моделей заснована на гідродинамічній аналогії.
Основним рівнянням даної моделі є рівняння безперервності, що виражає «закон збереження кількості автомобілів» на дорозі:
Формула 1
Де - густина, V(x,t) - середня швидкість автомобілів у точці дороги з координатою x в момент часу t.
Передбачається, що середня швидкість є детермінованою (зменшуваною) функцією щільності:
Поставляючи (1) отримуємо наступне рівняння:
Формула 2
Це рівняння описує поширення нелінійних кінематичних хвиль зі швидкістю перенесення
Насправді щільність автомобілів, як правило, не змінюється стрибками, а є безперервною функцією координат та часу. Для усунення стрибків у рівняння (2) був доданий член другого порядку, що описує дифузію густини, що призводить до згладжування профілю хвилі:
Формула 3
Однак використання даної моделіне адекватно реальності в описах нерівноважних ситуацій, що виникають поблизу неоднорідностей дороги (з'їзди і виїзди, звуження), соціальній та умовах так званого «stop-and-go» руху.
Для опису нерівноважних ситуацій замість детермінованого співвідношення (3) було запропоновано використовувати диференціальне рівняння для моделювання динаміки середньої швидкості.
Недоліком моделі Пейна є стійкість до малих збурень при всіх значеннях густини.
Тоді рівняння швидкості при такій заміні набуває вигляду:
Для запобігання розривам у праву частину додається дифузійний член, аналог в'язкості в рівняннях гідродинаміки
Нестійкість стаціонарного однорідного рішення при значеннях густини, що перевищують критичне, дозволяє ефективно моделювати виникнення фантомних заторів - режимів stop-and-go в однорідному потоці, що виникають внаслідок малих збурень.
Описані макроскопічні моделі сформульовані в основному на основі аналогій з рівняннями класичної гідродинаміки. Існує спосіб виведення макроскопічних моделей з опису процесу взаємодії автомобілів на мікрорівні з використанням кінетичного рівняння.
1.6.3 Кінетичні моделі
На відміну від гідродинамічних моделей, сформульованих у термінах густини та середньої швидкості потоку, кінетичні моделі засновані на описі динаміки фазової густини потоку . Знаючи еволюцію в часі фазової густини, можна розрахувати також і макроскопічні характеристики потоку - густину, середню швидкість, варіацію швидкостей та інші характеристики, які визначаються моментами фазової густини за швидкостями різного порядку.
Позначимо фазову густину як f (x, v, t). Звичайна (гідродинамічна) щільність (x, t), середня швидкість V (x, t) і варіація швидкостей І (x, t) пов'язані з моментами фазової щільності співвідношеннями:
1) Диференціальне рівняння, що описує зміну фазової щільності з часом, називається кінетичним рівнянням. Вперше кінетичне рівняння для транспортного потоку було сформульовано Пригожиним та співавторами у 1961 р. у наступному вигляді:
Формула 4
Це рівняння є рівнянням безперервності, що виражає закон збереження автомобілів, але тепер уже у фазовому просторі.
Згідно з Пригожин під взаємодією двох автомобілів на дорозі розуміється подія, при якому більш швидкий автомобіль наздоганяє більш повільний автомобіль, що рухається попереду. Вводяться такі спрощувальні припущення:
· можливість для обгону знаходиться з деякою ймовірністю p, в результаті обгону швидкість автомобіля, що обганяє, не змінюється;
· Швидкість попереду автомобіля в результаті взаємодії в будь-якому випадку не змінюється;
· Взаємодія відбувається в точці (розмірами автомобілів і відстанню між ними можна знехтувати);
· Зміна швидкості в результаті взаємодії відбувається миттєво;
· Розглядаються лише парні взаємодії, одночасні взаємодії трьох та більше автомобілів виключаються.
1.7 Постановка задачі
У ході поточного дослідження як основна інформація ми використовуємо статичні дані про заторів за допомогою сервісу «Яндекс.Пробки». Аналізуючи отриману інформацію, ми приходимо до висновку, що УДС міста Москви не справляється з транспортним трафіком. Труднощі, що виявляються на стадії аналізу отриманих даних, дозволяють, зроблять висновок про те, що більшість труднощів на УДС мають місце бути виключно в будні дні, і безпосередньо пов'язані з феноменом «МТМ» (маятникової трудової міграції), оскільки в ході аналізу труднощів у вихідні та святкові дні виявлено не було. Труднощі ж у будні дні несуть вигляд лавини, що розтікається з околиць міста до його центру, і зворотного ефекту в другій половині дня, коли «лавина» йде від центру в область. У ранкові години скрути починають спостерігатися на околицях Москви, поступово розтікаючись у місто. Також варто зауважити, що «розв'язка» радіальних магістралей не призведе до бажаного ефекту, оскільки, як видно з аналізу, «вхід» до міста стримує затори на певному часовому інтервалі, завдяки чому центральна частина міста ще певний час їде в оптимальному режимі . Потім, за наявності тих же труднощів, затори утворюються в зоні «МКАД-ТТК», при цьому затори на входах продовжують збільшуватися. Така тенденція має бути весь ранковий час. У той же час протилежний напрямок руху повністю вільний. З цього випливає висновок про те, що система управління світлофорним господарством та напрямом руху має бути динамічною, змінюючи свої параметри під поточну ситуацію на дорозі.
Постає питання про раціональне використання дорожнього ресурсу та реалізацію таких можливостей (зміна світлофорних фаз, реверсивні смуги та ін.).
При цьому цим неможливо обмежитися, оскільки цей «глобальний затор» не має кінцевої точки. Дані дії мають бути втілені в життя тільки разом з обмеженням в'їзду до Москви і центру, зокрема для жителів Підмосков'я. Оскільки, фактично виходячи з аналізу, всі проблеми зводяться до МТМ потоків, вони мають бути грамотно перерозподілені з особистого транспорту на громадський транспорт, роблячи його привабливішим. Такі заходи вже запроваджуються у центрі Москви (платне паркування тощо.). Це дозволить розвантажити дороги міста у години пік. Таким чином, всі мої теоретичні припущення будуються з «доробком на майбутнє», і тією умовою, що затор стане кінцевим (зменшитися кількість пасажиропотоків у центр), пасажиропотік стане більш мобільним (один автобус зі 110 пасажирами займає 10-14 метрів дорожнього полотна, проти 80 -90 одиниць особистого транспорту, з аналогічною кількістю пасажирів, що займають 400-450 метрів). У ситуації, коли кількість тих, хто в'їжджає, буде оптимізована (або хоча б зменшена максимально виходячи з економічних та соціальних можливостей) ми зможемо застосувати два припущення про те, як поліпшити управління УДС у Москві без вкладення великих коштів та обчислювальних потужностей, а саме:
· Використовувати аналітичні та модельні дані для виявлення проблемних зон
· Розробка способів покращення УДС та її управління в проблемних зонах
· Створення математичних моделей із запропонованими змінами та їх подальших аналіз на предмет ефективності та економічної доцільності, з подальшим введенням у практичне використання
Виходячи з вищесказаного, за допомогою математичних моделей ми можемо оперативно реагувати на зміни в УДС, прогнозувати її поведінку та підлаштовувати її структуру під них.
Таким чином, на радіальній магістралі ми зможемо зрозуміти причину того, чому вона працює в ненормальному режимі і має на своїй протяжності пробки та затори.
Таким чином, постановка задачі виходячи з проблеми складається з:
1. Аналізу однієї з радіальних магістралей щодо наявності труднощів, зокрема і години пік.
2. Створення моделі частини цієї радіальної магістралі у місці найбільших труднощів.
3. Введення в цю модель покращень на основі аналітики УДС за допомогою реальних даних та даних моделювання, та створення моделі із внесеними змінами.
2 Створення покращеного варіанту УДС
Виходячи з постановки завдання та аналізу транспортних труднощів у Москві, для створення практичної моделі я обрав ділянку відгалуження однієї з радіальних магістралей (Каширського Шосе), на ділянці від перетину Проспекту Андропова та Коломенського проїзду до зупинки «Торговий центр». Причиною вибору є безліч факторів і зокрема:
· Тенденція до утворення заторів в тих самих місцях з однаковою тенденцією
· Яскрава картина «МТМ» проблем
· Наявність розв'язуваних точок та можливості моделювання світлофорного регулювання на даній ділянці.
Малюнок 1.14 Вибрана ділянка
Вибрана ділянка має характерні проблеми, що піддаються моделюванню, а саме:
· Наявність двох проблемних точок та їх перехресного впливу
· Наявність проблемних точок, при зміні яких ситуація не покращиться (можливість застосування синхронізації).
· Чітка картина впливу проблеми МТМ.
Малюнок 1.15 11-00 проблеми у центр
Малюнок 1.16 Проблеми із центру. 18-00
Таким чином, на даній ділянці ми маємо такі проблемні точки:
· Два пішохідні переходи обладнаних світлофорною сигналізацією в нагатинській заплаві
· Світлофор на перетині проспекту Андропова та вулиці Нагатинська
· Нагатинський метроміст
2. Створення покращеного варіанту УДС
2.1 Аналітика ділянки
Довжина заторів на проспекті Андропова – 4-4,5 км у кожному з 2-х напрямків (вранці у центр – від Каширського шосе до другого пішохідного переходу в Нагатинській заплаві, увечері в область – від Новоостапівської вулиці до Нагатинської вулиці). Другий показник, швидкість руху в години пік, тут не перевищує 7-10 км/год: на проїзд ділянки 4,5 км у години пік треба близько 30 хвилин. Що стосується тривалості, пробки в центр на проспекті Андропова починаються о 7-й ранку і тривають до 13-14 годин, а пробки в область зазвичай починаються о 15-й і тривають до 21-22 години. Тобто тривалість кожного з «годин пік» на Андропова становить 6-7 годин у кожному з 2-х напрямків - позамежний рівень навіть для звичної до пробок Москви.
2.2 Дві основні причини утворення пробок на проспекті Андропова
Причина перша: проспект перевантажений зайвим "перепробіговим" трафіком. Від метро «Нахімівський проспект» до центру житлової частини Друкарів прямий 7,5 кілометрів. А дорогами 3 маршрути від 16 до 18 кілометрів. Причому два із трьох маршрутів проходять через проспект Андропова.
Малюнок 2.1
Всі ці проблеми викликані тим, що між Нагатинським і Братеєвським мостами прямою 7 км, а по Москві-ріці - 14 км. Жодних інших мостів і тунелів у цьому проміжку просто немає.
Причина друга: мала пропускна спроможність самого проспекту. Насамперед рух сповільнює виділена смуга, створена кілька років тому, після чого для руху в кожному напрямку залишилося лише по 2 смуги. Дуже сприяють заторам і 3 світлофори (транспортний перед Нагатинською вулицею та два пішохідні у Нагатинській заплаві).
2.3 Стратегічні рішення на проспекті Андропова
Щоб вирішити проблему перепробігів, треба побудувати 2-3 нові зв'язки між Нагатинським та Братіївським мостами. Ці транспортні зв'язки усунуть перепробіги та дозволять керувати трафіком, стимулюючи не потік «центр – периферія», а потік «периферія – периферія».
Проблема в тому, що будувати такі об'єкти дуже довго та дорого. І коштуватиме кожен із них мільярди рублів. Таким чином, якщо ми хочемо щось покращити тут не через 5 років, а вже через рік-два, єдиний спосіб працювати з пропускною спроможністю проспекту Андропова. На відміну від будівництва нових мостів і тунелів, це в рази швидше (0,5-2 роки) та на 2 порядки дешевше (50-100 мільйонів рублів). Тому що збільшити пропускну спроможність проспекту можна недорогими локальними "тактичними" заходами у найпроблемніших місцях. Це дозволить забезпечити попит, покращити всі показники руху: знизити довжину пробок, скоротити тривалість годин пік, підвищити швидкість.
2.4 Тактичні заходи на проспекті Андропова: 4 групи
2.4.1 Етап 1. Світлофорне регулювання
На проблемній ділянці 3 світлофори: два пішохідні у Нагатинській заплаві та один транспортний на перехресті Андропова з вул. Новинки та Нагатинської.
Два пішохідні світлофори в Нагатинській заплаві вже працюють у максимально «протягнутому» режимі (150 секунд транспорту, 25 пішоходам). Додаткове подовження циклу навряд чи буде ефективним для транспорту, але збільшить і так чимало очікування пішоходами. Єдине, що можна і потрібно зробити світлофорним регулюванням - синхронізувати обидва пішохідні світлофори, щоб транспорт витрачав менше часу на розгін-гальмування. Це матиме невеликий ефект у бік центру в ранковий час пік. На трафік в обидві сторони в решту часу та у бік області ввечері пішохідні світлофори не мають великого впливу. А ось зі світлофором на перехресті Андропова з вул. Новинки та Нагатинська ситуація цікавіша. Він явно тримає потік у бік області у вечірній час пік. Далі транспорт роз'їжджається масою альтернативних вулиць (Нагатинській набережній, вулиці Новинки, Нагатинській вулиці, Коломенському проїзду, Каширському шосе та Пролетарському проспекту).
Розглянемо поточний режим роботи світлофора та подумаємо, що можна зробити.
Малюнок 2.2 Світлофорні фази
Малюнок 2.3 Поточний режим роботи світлофора
По-перше, дуже короткий цикл для перехрестя з магістральною вулицею - всього 110-120 секунд. На більшості магістралей час циклу в години пік 140-180 секунд, Ленінський за 200.
По-друге, режим роботи світлофора час від часу змінюється вкрай несуттєво. Тим часом, вечірній потік принципово відрізняється від ранкового: прямохідний потік по Андропову з області набагато менше, а лівоповоротний потік з Андропова з центру набагато більший (народ повертається додому до Нагатинської затоки).
По-третє, навіщось скорочено час прямохідної фази вдень. Який у цьому сенс, якщо прямохідний потік Новинкою та Нагатинською і в години пік не має серйозних проблем, а вже вдень і поготів?
Рішення напрошується само собою: денний режим прирівняти до ранкового, а у вечірній - трохи «протягнути» фазу 3 (Андропова в обидва боки), і сильно протягнути «віяльну» фазу 4 (Андропова з центру прямо, праворуч і ліворуч). Це дозволить ефективно звільняти і прямий хід Андропова, і «кишеню» для тих, хто чекає на поворот.
Рисунок 2.4 Пропонований погодинний режим роботи світлофора
Щодо ранкової години пік, «протягувати» Андропова на цьому перехресті вранці в центр зараз безглуздо. Потік не використовує всю довжину "зеленої фази", оскільки не може швидко проїхати перехрестя через пробку перед звуженням на мосту з 4 смуг в 2.
2.4.2 Перерозмітка
З розміткою на Андропова дві проблеми:
- виділена смуга на 3-х смугових ділянках проспекту Андропова
- неправильна розмітка на перехресті з Нагатинською вулицею та вулицею Новинки
Ні для кого не секрет, що виділена смуга різко зменшила пропускну спроможність проспекту Андропова. Це стосується руху і до центру, і до області. Причому пасажиропотік виділеною смугою мінімальний і не перевищує кількох сотень людей навіть у години пік. Це не дивно: виділена смуга йде вздовж «зеленої» гілки метро, а точок тяжіння на відстані від метро вздовж самого проспекту майже немає. Провізна здатність кожної зі смуг загального користування близько 1200 чоловік на годину. Це означає, що виділена смуга, попри своє завдання, не підвищила, а знизила провізну спроможність проспекту Андропова.
Додам: пасажиропотік наземного транспорту на проспекті Андропова має шанси знижуватись і надалі. Адже вже у 2014 році у Нагатинській заплаві планують відкрити станцію метро «Технопарк». Це дозволить більшій частині відвідувачів ТЦ «Мегаполіс» та працюючим у Технопарку користуватися метро без пересадки на наземний транспорт.
Здавалося б, скасувати всю виділення на Андропова, і річ із кінцем. Але аналіз та багаторічні спостереження показали: виділена смуга на проспекті Андропова заважає не скрізь, а лише на тих ділянках, де в один бік 3 смуги (2+А) і де це створює «пляшку». Там же, де 4 смуги в один бік (3+А), виділена смуга не заважає, а навіть дозволяє підвищити рівномірність транспортних потоків та виконує функцію смуги для правого повороту, розгону-гальмування.
Тому в першочерговому порядку я пропоную скасувати виділену смугу на вузьких ділянках, де вона створює найбільші проблеми:
· у бік області на Сайкінському шляхопроводі та Нагатинському мосту, вулиці Сайкіна
· У бік центру по всій ділянці від в'їзду на Нагатинський міст до Сайкінського шляхопроводу включно.
Малюнок 2.5 Місця, де потрібне скасування виділеної смуги
Рисунок 2.6 Перерозмітка проспекту Андропова
Ще потрібно буде скасувати виділену смугу у бік області на ділянці від Нагатинської вулиці до Коломенського проїзду: потік, що збільшився, у бік області не зможе уміститися в існуючі 2 смуги. До речі, в'їзд на виділену смугу тут дозволено і зараз, але тільки для паркування.
Крім виділеної смуги, проблеми створює бездарна розмітка проспекту Андропова у зоні перехрестя з Нагатинською вулицею та вулицею Новинки.
По-перше, ширина смуг велика, а їх кількість – недостатня. При такій ширині проїжджої частини з кожного боку легко додати смугу.
По-друге, розмітка, незважаючи на розширення створу перехрестя, навіщось веде весь трафік у лівоповоротні ряди, звідки їдуть прямо доводиться «продиратися» правіше.
Втім, невмілість проектувальників є пробачливою: вузол складний, ширина проїжджої частини «гуляє». Це рішення для цього перехрестя також з'явилося не одразу. Воно дозволяє число рядів у зоні перехресть збільшити, а тих, хто їде прямо - залишити у своїх смугах, «відводячи» прямий хід трохи правіше. Як результат, кількість перебудов знизиться, швидкість проїзду перехрестя підвищиться в обох напрямках.
Малюнок 2.7 Запропонована схема організації руху на перехресті Андропова – Нагатинська – Новинки
Малюнок 2.8 Запропонована схема руху на перехресті
Локальні розширення
Наступним етапом пропонується виконати найнеобхідніше нині розширення у бік центру дільниці від Нагатинського метромоста до з'їзду вулицю Трофимова. Це дозволило б повернути особистому транспорту 3 смуги, віддавши 4-му транспорту громадському - так само, як зроблено у бік області на цій ділянці.
Малюнок 2.9 Локальні розширення
2.4.3 Будівництво 2-х позавуличних переходів у Нагатинській заплаві
Нещодавно розпочато будівництво надземного переходу в районі зупинки ВІД «Південний річковий вокзал» біля самого Нагатинського метромосту. Після його будівництва пішохідний світлофор демонтують.
Малюнок 2.10 План будівництва надземного переходу
Це могло б стати чудовою новиною, але радіти нема чому: за 450 метрів на північ є ще один перехід навпроти ТЦ «Мегаполіс». Одночасне будівництво 2-х переходів зі зняттям обох пішохідних світлофорів дало б відмінний ефект для направлення до центру: пропускна спроможність за тієї ж ширини зросла б на 30-35% за рахунок скасування розгону-гальмування перед світлофорами. Але навпроти ТЦ «Мегаполіс» позавуличний перехід будувати не збираються, а отже, другий світлофор не знятиме. А ефект від одного надземного переходу буде незначним – не більше ніж від простої синхронізації двох світлофорів. Тому що в обох випадках розгін-гальмування зберігається.
3 Обґрунтування запропонованих рішень
На основі аналітики ми обчислюємо проблемні точки у тій чи зоні УДС і, відштовхуючись від фактично можливих рішень, застосовуємо їх. Оскільки програма дозволяє нам не робити громіздких обчислень вручну, ми можемо з її допомогою визначити оптимальні параметри тих чи інших проблемних місць в УДС, та після їх оптимізації отримати результат комп'ютерного моделювання, яке може відповісти на питання, чи покращать пропускну спроможність запропонованих змін. Таким чином, застосовуючи комп'ютерне моделювання, ми можемо перевірити, чи відповідають запропоновані зміни на основі аналітики реальної ситуації, і чи зміниться очікуваний ефект.
3.1 Використання комп'ютерної симуляції
Використовуючи комп'ютерну симуляцію, ми можемо з великою ймовірністю спрогнозувати процеси, що відбуваються на УДС. Таким чином ми можемо провести порівняльний аналіз моделей. Змоделювати поточну структуру УДС з її особливостями, модернізувати та покращити її та створити нову модель, в основу якої ляже УДС із внесеними до неї коригуваннями. Використовуючи отримані дані, ми на стадії комп'ютерного моделювання можемо отримати відповідь, чи є сенс вносити ті чи інші зміни в УДС, а також використовувати моделювання для виявлення проблемних зон.
Подібні документи
Характеристика основних категорій автомобільних шляхів. Визначення пропускної спроможності дороги та коефіцієнта завантаження рухом. Розрахунок середньої швидкості руху транспортного потоку. Виявлення небезпечних місць дороги шляхом коефіцієнтів аварійності.
курсова робота , доданий 15.01.2012
Визначення необхідності коригування існуючої моделі управління та впровадження нових керуючих впливів та встановлення додаткових технічних засобів організації дорожнього руху. Розробка оптимальної моделі керування дорожнім рухом.
дипломна робота , доданий 16.05.2013
Аналіз транспортних систем за допомогою математичного моделювання. Локальні характеристики транспортних потоків. Моделювання транспортного потоку на околиці звуження вулично-дорожньої мережі. Стохастичне перемішування під час підходу до вузького місця.
практична робота , доданий 08.12.2012
Класифікація методів керування дорожнім рухом. Автоматизована система управління дорожнім рухом "Зелена хвиля" у Барнаулі. Принципи її побудови, структура, порівняльна характеристика. Кільцева автодорога у м. Санкт-Петербурзі.
контрольна робота , доданий 06.02.2015
Оцінка забезпеченості розрахункової швидкості, безпеки дороги, рівня завантаження дороги рухом, рівні покриття доріг. Визначення фактичного модуля пружності нежорсткого дорожнього одягу. Сутність утримання автомобільних шляхів та дорожніх споруд.
курсова робота , доданий 08.12.2008
Перехід до інноваційної моделі розвитку транспортної інфраструктури. Основні пункти транспортної стратегії Уряду до 2030 року. Аналіз та пошук найбільш оптимального вирішення транспортної проблеми. Зростання транспортного сектора у російській економіці.
стаття, доданий 18.08.2017
Особливості транспортної галузі. Сутність та завдання транспортної логістики. Організація транспортного господарства на ВАТ "НефАЗ". Планування діяльності транспортного господарства підприємства Аналіз та оцінка ефективності діяльності цієї організації.
курсова робота , доданий 14.01.2011
Визначення інтенсивності руху - кількості транспортних засобів, що пройшли контрольний переріз дорожнього об'єкта у всіх напрямках за одиницю часу (година, доба). Аналіз щільності транспортного потоку, його розподілу та коефіцієнта завантаження.
лабораторна робота , доданий 18.02.2010
Організація руху міського пасажирського транспорту під час роботи адаптивної системи управління дорожнім рухом. Порівняння тимчасово-залежної та транспортно-залежної стратегії. Розробка основи нечітких правил. Побудова функції власності.
курсова робота , доданий 19.09.2014
Аналіз заходів, вкладених у організацію транспортного ринку. Державне регулювання транспортної діяльності як складний комплекс заходів, спрямований забезпечення необхідного рівня транспортного обслуговування в усіх регіонах.
Міські проблеми, такі як пробки, можуть вирішуватися консервативним способом, тобто фізичним збільшенням пропускної спроможності доріг, або ж «розумним» (від анг. smart). У такому разі весь транспорт і люди об'єднуються в екосистему, і саме місто «приймає рішення», як розподіляти транспортні потоки. Про наше бачення подібної екосистеми ми розповідалина одному із форумів «Відкриті інновації». А в цій статті обговоримо, як саме працюють «розумні» системи керування трафіком і чому вони такі важливі для всіх нас.
Навіщо містам «розумна» транспортна система
За даними ВООЗ, понад 50 відсотків населення світу проживає у містах. Мегаполіси здебільшого страждають від транспортних проблем. Дорожні пробки - їх найявніший і найпоширеніший прояв. Вони негативно впливають на локальні економіки та якість життя всіх учасників дорожнього руху, тому, безумовно, потребують усунення.Як приклад розглянути типову причину утворення пробок - ремонтні роботи - консервативний підхіддо її вирішення полягатиме у перенаправленні руху на найближчі паралельні дороги. В результаті, найімовірніше, вони будуть перевантажуватися слідом за основною магістраллю, і поблизу дільниці, що ремонтується, в годину-пік не залишиться жодної вільної смуги руху.
Зрозуміло, влада намагатиметься вибудувати прогноз, на яких дорогах швидше виникне затор. Для цього вони враховуватимуть наявність світлофорів на перехрестях, середню завантаженість доріг та інші статичні фактори. Однак у той момент, коли 8-бальний затор паралізує центр міста, вже навряд чи вдасться щось зробити, крім «ручного управління» ситуацією, наприклад, за допомогою відключення світлофорів та термінової заміни їх службовцем-регулювальником.
Є й інший сценарій розвитку того самого сюжету. У «розумному» місті дані надходять не тільки з традиційних джерел, але і від датчиків і пристроїв як встановлених усередині самих автомобілів, так і елементами інфраструктури, що виступають. Відомості про розташування транспортних засобів дозволяють перерозподіляти дорожній рух у реальному часі, а додаткові системи, такі як «розумні» світлофори та паркування, забезпечують ефективне керування трафіком.
Розумний підхідстав вибором для низки міст і довів свою ефективність. У німецькому Дармштадті датчики допомагають забезпечувати безпеку пішоходів та відсутність пробок на дорогах. Вони виявляють великі групи людей, які мають намір перейти дорогу, і адаптують під них зміну фаз світлофора. До того ж вони визначають, чи поблизу потоку автомобілів немає, і «дають команду» переключити світло, тільки коли машини закінчать рух.
А система розподілу транспортного потоку в данському місті Орхус дозволила не лише скоротити пробки на дорогах, а й знизити загальну витрату палива. Інтелектуальна система Лондона повідомляє водіїв про перевантаженість окремих дорожніх ділянок. «Розумна» система управління трафіком допомогла Сінгапуру стати одним із найменш «завантажених» великих міст світу.
З чого складається «розумна» система управління рухом
Ключовий інструмент «розумного» міста – це дані. Тому серцем системи є платформа, яка об'єднує всі потоки інформації, що надходять у реальному часі, інтерпретує їх та приймає самостійне рішення про управління рухом (або допомагає ухвалити таке рішення відповідальній особі). Зазвичай, навколо платформи формується командний центр управління рухом.
Фото Highways England /
Географічна інформаційна система (ГІС) відкриває можливість зв'язку даних із конкретними точками на дорожній карті. Для безпосереднього управління рухом є окремі підсистеми. Їхня кількість, складність та рівні взаємодії один з одним можуть відрізнятися в різних моделях залежно від поставлених завдань.
Наприклад, у китайському Ланфані діють такі підсистеми: світлофорне регулювання, збирання інформації про рух, спостереження та оповіщення, геолокаційне позиціонування службових автомобілів та інші складові. У румунській Тімішоарі, окрім уже описаних елементів, реалізовано підсистеми пріоритизації громадського транспорту та розпізнавання номерних знаків.
Систему «розумного» розподілу транспортних потоків можна ускладнювати різними елементами, але головною в ній залишається платформа, яка керує всіма підсистемами на основі даних, що надходять. З цієї точки зору важливою складовою будь-якої моделі розумного міста є автомобілі. Вони не тільки здатні приймати інформацію (за допомогою таких пристроїв, як WayRay Navion) і адаптуватися під конкретну дорожню ситуацію, але й самі виступають постачальниками значних відомостей про завантаженість доріг.
Пропонуємо докладніше розглянути будову найважливіших підсистем «розумного» міста.
Інтелектуальна система моніторингу та реагування
Моніторинг – це основа роботи командного центру. Своєчасне виявлення інцидентів та реагування на них гарантує безпеку на дорогах та зниження пробок. Користувач найчастіше бачить результати моніторингу на карті із колірною схемою, що відображає завантаженість потоку в реальному часі.Джерелами даних виступають камери, які автоматично аналізують ситуацію на дорогах у міру руху автомобілів у зоні їхньої дії, а також п'єзоелектричні датчики. Ще один спосіб моніторингу в екосистемі «розумного» міста – трекінг потоку на основі бездротового сигналу, наприклад, від Bluetooth-пристроїв.
«Розумні» світлофори
Принцип роботи цієї підсистеми простий: звані «адаптивні» світлофори використовують засоби виміру обсягу трафіку, які сигналізують необхідність зміни фаз. При утрудненому транспортному потоці зелена фаза світлофора для автомобілів активна довше, ніж зазвичай. Під час пікових періодів світлофори на перехрестях синхронізують свої фази так, щоб забезпечити зелені коридори для транспорту.У розумному місті система ускладнюється за рахунок комплексу датчиків, які передають алгоритмам дані для аналізу. У Тайлері, штат Техас, таке рішення у складі інтегрованої системи управління трафіком від Siemens зменшило затримку руху на 22%. Час у дорозі однією з головних магістралей міста Бельвю, штат Вашингтон, скоротився на 36% протягом години-пік з моменту встановлення адаптивних світлофорів.
Так функціонує ця підсистема у своєму базовому втіленні: інфрачервоні датчики, встановлені в одному з елементів дорожньої інфраструктури, наприклад, світлових опорах, виявляють виникнення або відсутність автомобільного потоку. Ці дані є вхідним сигналом для системи, яка генерує вихідні сигнали для червоної, зеленої та жовтої фаз і контролює тривалість циклу, враховуючи кількість транспортних засобів на кожній дорозі.
Та ж інформація як вихідний сигнал може передаватися учаснику дорожнього руху. Адаптивні світлофори здатні працювати і в аварійному режимі, коли засоби відеофіксації розпізнають транспортний засіб, що рухається, як машину швидкої допомоги або поліцейський автомобіль з включеними сигнальними маячками. У такому разі для автомобілів, які перетинають маршрут проходження службової машини, сигнали світлофора зміняться на червоні.
Джерелами вхідних даних для системи можуть бути камери, що розпізнають обсяг трафіку. У комплексній моделі «розумного» міста інформація від камер про ситуацію на дорозі передається одночасно до програмного середовища для алгоритмічної обробки та системи управління, де вона візуалізується і виводиться на екрани в командному центрі.
Існують і варіації «розумних» світлофорів. Наприклад, технології штучного інтелекту покращують координацію дорожніх сигналів у єдиній екосистемі. У цьому випадку цикл також запускають датчики та камери. Алгоритми ІІ використовують отримані дані для створення таймінгу циклів, ефективного проходження потоку траєкторією і повідомляють інформацію наступним світлофорам. Втім, така система залишається децентралізованою, і кожен світлофор «приймає свої власні рішення» за тривалістю фаз.
Дослідники Наньянського технологічного університету цього року представили алгоритм розподілу трафіку, що ґрунтується на машинному навчанні. Маршрутизація в даному випадку має кілька нюансів: враховується поточне навантаження на транспортну систему та прогнозована невідома величина, яка відповідає за додаткове навантаження, яке може потрапити до мережі у будь-який момент часу. Далі алгоритм відповідає за розвантаження мережі на кожному вузлі або, інакше кажучи, перехресті. Така система у поєднанні зі світлофорами зі штучним інтелектом може стати рішенням для найпоширеніших міських проблем.
"Розумні" світлофори відіграють важливу роль для водіїв не тільки завдяки очевидному ефекту - зниженню кількості пробок, - але і через зворотний зв'язок, що надходить на пристрої, такі, як WayRay Navion. Наприклад, водії в Токіо отримують сигнали від інфрачервоних датчиків прямо на навігатори, які на основі цього вибудовують оптимальний маршрут.
«Розумні» паркування
Відсутність паркувальних місць або їхнє неефективне використання - не просто побутова проблема, але виклик для міської інфраструктури та ще одна причина завантаженості доріг. Згідно з Navigant Research, кількість «розумних» паркувальних місць у світі, як очікується, досягне 1,1 млн до 2026 року. Від звичайних паркувань їх відрізняють автоматизовані системи пошуку вільних місць та інформування користувачів.Як один із вирішень проблеми команда Університету Райса розробила модель, в якій для пошуку вільних місць використовується камера, яка робить щохвилини фотографії. Після цього проводиться їх аналіз за допомогою алгоритму виявлення об'єктів. Однак у рамках екосистеми «розумного» міста це рішення не є оптимальним.
«Розумна» система паркування має не тільки знати статус кожного місця («зайнято/вільно»), а й вміти направляти користувача до нього. Деваврат Кулкарні (Devavrat Kulkarni), старший бізнес-аналітик в IT компанії Maven Systems, пропонує використовувати для цього мережу датчиків.
Інформація, отримана від них, може бути оброблена алгоритмом і представлена кінцевому користувачеві через додаток або інший інтерфейс користувача. У момент паркування додаток зберігає інформацію про місцезнаходження транспортного засобу, що полегшує пошук автомобіля надалі. Це рішення можна назвати локальним, придатним, наприклад, окремих торгових центрів.
Справді, масштабні проекти в цій галузі реалізуються прямо зараз у деяких містах США. Ініціатива щодо розгортання єдиної мережі «розумних» парковок LA Express Park проводиться у Лос-Анджелесі. Стартап StreetLine, що відповідає за втілення ідеї в життя, використовує методи машинного навчання для об'єднання кількох джерел даних - сенсорів та камер спостереження - у єдиний канал передачі відомостей про зайнятість місць для паркування.
Ці дані розглядаються в контексті паркувальної системи в масштабах усього міста та надходять до відповідальних осіб. StreetLine надає SDK, систему автоматичного розпізнавання номерних знаків та API для роботи з усіма джерелами даних, пов'язаними з паркуванням.
Інтелектуальні паркувальні системи можуть бути корисні і для керування щільністю руху. В основі такого рішення заздалегідь закладено інструмент регулювання трафіку – зміну тарифних ставок у платних зонах паркування. Це дозволяє розподіляти завантаженість місць для паркування в певні дні, тим самим знижуючи пробки на дорогах.
Для кінцевих користувачів дані про вільні місця і більш дешеві тарифи допомагають планувати поїздку і в цілому якісно підвищують водійський досвід - за допомогою пристроїв, що носяться або вбудовані в автомобіль, користувач отримує практичні вказівки з пошуку паркувального місця в реальному часі.
Майбутнє управління рухом
Три основні елементи, які ми розглянули, - це вже готова екосистема, здатна значно полегшити ситуацію на дорогах сучасного міста. Однак інфраструктура майбутнього створюється насамперед для транспорту майбутнього. Автоматизовані системи моніторингу, паркінгу та управління полегшують перехід до використання безпілотних автомобілів.Однак і тут не все так однозначно: інфраструктура, яка використовується у «розумних» містах зараз, безпілотникам може просто не потрібна. Наприклад, якщо сьогодні в зміні фаз світлофора ще є сенс, то, за версією дослідників Массачусетського технологічного інституту, безпілотним автомобілям звичні нам сигнали не будуть потрібні зовсім - швидкість транспортних засобів і зупинка на перехрестях автоматично здійснюватиметься за допомогою сенсорів.
Ймовірно, навіть найрозвиненіші системи керування трафіком переживуть глобальну модернізацію після того, як безпілотники витіснять із доріг традиційні автомобілі, і ми побачимо новий світ без світлофорів, дорожніх камер та «лежачих поліцейських». Однак поки що повний перехід на безпілотні авто малоймовірний. А ось зростання числа «розумних» міст – це цілком реальна перспектива.
Зпізокзпродоращенійіпробпрознагоденій, взтречающіхзявтедозте
АРМ– автоматизоване робоче місце;
АСЗУД- Агрегатна система засобів управління дорожнім рухом;
АСУД- Автоматизована система управління дорожнім рухом;
АСУД- З– АСУД з урахуванням ПЕОМ;
УПУ- Виносний пульт управління;
ГПроРПроД,ГПроРПроД- М, ГПроРПроД- М1 - Назви автоматизованих систем управління дорожнім рухом із застосуванням ЕОМ;
ПК- дорожній контролер;
ДПЗУ– дисплейний пульт оперативного керування;
ДП– диспетчерський пункт;
ДТП- дорожньо-транспортна пригода;
ДТЗ- дорожньо-транспортна мережа;
ДП– детектор транспорту;
ДК- Диспетчерське управління;
ІП- Інженерний пульт; ІР- Індуктивна рамка; ІЦ- Імітатор центру;
КДА- Контрольно-діагностична апаратура;
ДоРЦ- Контролер районного центру; ДоТЗ- Комплекс технічних засобів; КУ- Координоване управління; МнЗх- мнемосхема;
ПДо- Програма координації;
ПКУ– пульт контролю та управління;
ПЕУМ- Персональна електронно-обчислювальна машина;
РУ- ручне керування;
ЗМЕП– спеціалізований монтажно-експлуатаційний підрозділ;
ЗПро- Світлофорний об'єкт;
ТБП- Табло виклику пішохідне;
ТЕ- Транспортна одиниця (автомобіль);
ТІ- Телевимірювання;
ТКП- Табло колективного користування;
ТП- Транспортний потік;
ТЗ- Телесигналізація;
ТСКУ- Телемеханічна система координованого управління;
ТУ- Телеуправління;
УУДо- Керівник обчислювальний комплекс;
УДС- Вулично-дорожня мережа;
УЗН- Керований дорожній знак;
УНІТП– будову накопичення інформації з транспортних потоків;
УП- Керуючий пункт;
УЗДо– покажчик рекомендованої швидкості руху;
ЦУП- Центральний керуючий пункт.
1. Основи управління дорожнім рухом
1.1. Транспортний потік як об'єкт керування
Об'єктом управління АСУД є транспортний потік, що описується сукупністю ознак, що характеризують процес руху: інтенсивністю, швидкістю, складом потоку, інтервалами в потоці та деякими іншими показниками.
Транспортному потоку притаманні цілком певні властивості, які мають бути враховані під час виборів управління у системі. Тому розглянемо деякі найважливіші особливості транспортного потоку.
1 . 1 . 1. Звойства транспіртнпрогпро потпродоа
По-перше, натурні обстеження руху транспортних засобів у містах показують, що характеристики транспортних потоків зазнають протягом доби значних змін, що виникають через нерівномірність надходження автомобілів до транспортної мережі. У цьому полягає динамічний характер поведінки об'єкта управління.
По-друге, щоденний періодичний вимір тих самих параметрів потоку у фіксовані інтервали часу доби показує статистичний характер процесу руху транспортних засобів. Імовірнісна поведінка об'єкта управління обумовлена тим, що транспортний потік формується з індивідуальних учасників руху, які використовують різні типи транспортних засобів і мають мету поїздки (у часі та просторі).
По-третє, ці статистичні закономірності руху мають стійкий характер через наявність детермінованих тенденцій у русі транспортних засобів. Справді, переважна більшість поїздок має періодичний характер і часто
здійснюється за постійними маршрутами (ділові поїздки, робота громадського маршрутизованого транспорту, вантажні перевезення). p align="justify"> Колективна поведінка потоку, що є результатом взаємодії учасників з різними цілями і різними психофізіологічними характеристиками, підпорядковується закону великих чисел і робить стабільними ймовірнісні характеристики руху транспортних засобів. Саме відсутність хаосу в транспортній мережі уможливлює функціонування АСУД, яка, у свою чергу, сприяє ще більшій стабілізації процесів руху.
По-четверте, найважливішим властивістю транспортних потоків, багато в чому визначальним принципи управління, є їхню інерційність. Під інерційністю розуміється властивість об'єкта управління безперервно
переходити зі стану в стан у часі та просторі. Дійсно, параметри руху транспортних одиниць, виміряні в певний момент часу, не можуть істотно змінитись за малий проміжок часу через те, що кожна одиниця має кінцеву, цілком певну швидкість і може бути виявлена в цьому проміжку в межах обмеженої ділянки транспортної мережі. Ця властивість проявляється, перш за все, у тому, що середні параметри потоків (інтенсивність, швидкість, щільність, інтервали) змінюються у часі та просторі безперервно. Наявність «пачок» у потоках є результатом малої мінливості структури потоку за його проходження суміжних перехресть, тобто. наслідком інерційності у зміні інтервалів між послідовними автомобілями. Інерційність об'єкта управління свідчить про можливості прогнозування змін його характеристик у невеликих інтервалах.
По-п'яте, всі ці властивості проявляються як результат взаємозалежного руху транспортних засобів. Ця взаємозалежність виявляється головним чином у тому, що часом малі зміни умов руху на окремих магістралях та перехрестях (звуження проїжджої частини, зміна погодних умов, порушення режиму світлофорної сигналізації) призводять до різкої зміни характеру руху не тільки на даній ділянці, а й на віддалених магістралях та перехрестях міста. Особливо сильно зв'язок регульованих транспортних вузлів позначається в режимах насичення мережі, коли транспортний затор, що виник на окремому перехресті, поширюється на значну ділянку мережі. Зв'язність у мережі носить складний, часом непередбачуваний характер. Чим сильніша властивість зв'язності, тим більші ділянки мережі необхідно розглядати, вирішуючи завдання управління, і тим складніше це завдання, оскільки під об'єктом управління доводиться розуміти не окремі перехрестя, а пов'язані між собою транспортні вузли.
Фактор взаємозалежності проявляється також і в умовах стисненого руху транспортних засобів по перегонах і через перехрестя мережі. Для того щоб забезпечити безпечний та швидкий рух автомобілів у транспортному потоці, водії змушені робити різні маневри, зумовлені реальною дорожньою ситуацією. Внаслідок цього закономірності руху окремих транспортних засобів можна розглядати як наслідок сумарних взаємодій у потоці. Характеристики результуючого взаємодії є тими вихідними для системи параметрами, якими вирішується питання про призначення тієї чи іншої управління
рухом.
1 . 1 . 2. Зпростоянія транспіртнпрогпро потпродоа
Зупинимося докладніше на типових випадках дорожнього руху. Експериментальні та теоретичні дослідження дають підстави виділити три якісно різні стани, які ми умовимося називати звпробпродным, групповим і винуждвінным .
При малій інтенсивності потоку, коли пропускна спроможність дороги не є фактором, що обмежує безперешкодний рух, швидкість руху транспортних засобів близька до швидкості вільного руху. Взаємодія між транспортними одиницями в режимі вільного руху настільки мала, що їх можна знехтувати. Стан вільного транспортного потоку характеризується як незалежним рухом окремих транспортних одиниць, а й тим, які інтервали між одиницями у потоці складаються у своїй. Численні експериментальні роботи, а також граничні теореми
масового обслуговування говорять про те, що розподіл інтервалів у вільному потоці близький до експоненційного і, отже, кількість прибуття транспортних одиниць потоку в деякому інтервалі в часі чи просторі описується законом Пуассона. Вільний стан потоку спостерігається в реальній транспортній мережі на перегонах з рідкісним рухом у перерізах, віддалених більш ніж на 800 м від перехрестя живлення.
Інша картина виникає, якщо розглядати груповий режим руху. Груповий рух транспортних засобів складається при дещо більших інтенсивностях руху, коли пропускна спроможність дороги та перехрестя вже істотно впливає на умови руху. Для того, щоб зберегти швидкість, водії швидкохідних автомобілів змушені здійснювати обгони, перебудови
та інші маневри. У режимі вільного руху обгони у потоці здійснюються практично без взаємодії між транспортними одиницями. Груповий рух характеризується максимальною взаємодією одиниць під час руху, максимальною інтенсивністю вимушених маневрів. Внаслідок цього весь транспортний потік поділяється на сукупність черг, що мають швидкість тихохідних головних автомобілів. Швидкості швидкохідних транспортних одиниць у своїй падають. Тепер рух транспортних засобів може бути описано законом Пуассона, оскільки відстані між послідовними автомобілями в чергах близькі до відстаней безпеки, тобто. не підкоряються експоненційному розподілу. Характерним прикладом групового потоку є рух транспортних засобів, що спостерігається в перерізі перегону, розташованого в 20 - 30 м за живильним його перехрестям. Пачки в потоці, що виникають
після проходження транспортних одиниць через перехрестя, у міру руху по перегону «розвалюються» порівняно повільно, і потік у перерізі має ще яскраво виражену групову форму.
Коли інтенсивність руху збільшується і досягає пропускної спроможності дороги, умови обгонів швидкохідних автомобілів тихохідних утрудняються, черги, утворені при груповому режимі руху, подовжуються і практично зливаються в єдину чергу. При цьому швидкості транспортних засобів у потоці вирівнюються і виявляються близькими до швидкостей тихохідних автомобілів, інтервали між транспортними одиницями в потоці стають близькими до детермінованих, рівних відстаней безпечного руху. Цей режим руху називатимемо вимушеним.
Ще однією особливістю об'єкта управління є у ньому тенденції розвитку. Кількісні зміни об'єкта управління
пов'язані з природним зростанням автомобілізації, спорудженням нових регульованих перехресть, будівництвом розв'язок у різних рівнях, поліпшенням динамічних характеристик транспортних засобів, з переглядом організації руху в регульованому районі (введення та скасування поворотних рухів, введення вулиць з одностороннім рухом, заборона проїзду деякими вулицями вантажному транспорту , заборона та дозвіл стоянок та ін.). Ці кількісні зміни призводять, як правило, до зміни структури потоків, ступеня зв'язаності окремих перехресть мережі, масштабів регульованої мережі, що може вимагати якісного переналаштування керуючого органу і призвести до перегляду виду алгоритмів управління для того чи іншого перехрестя. Таким чином, система управління рухом обов'язково має бути "гнучкою" по відношенню до об'єкта управління.
1 . 1 . 3. Разпределвініє временых інтервалів
Більшість дослідників, розглядаючи транспортний потік на відрізку магістралі значної довжини, користуються для опису часових інтервалів складовими розподілами виду
F (d t ) =
A L- b 1 S +
B L- b 2 S
+ C L- b 3 S
де кожне з трьох складених описів описує певну частину потоки:
ü A L- b 1 S
ü B L- b 2 S
- вільно рухається;
– частково з в'язання;
ü CL- b 3 S - Пов'язана частина ТП.
Кожен із трьох коефіцієнтів А, У, З означає частку інтенсивності руху, що у одному з трьох станів, тому їх сума
Розподіл (1.1) досить добре описує ТП на магістралях безперервного руху. Розглядаючи завдання опису ТП на міських
вулицях, оснащених світлофорами, доцільніше аналізувати
розподіл тимчасових інтервалів усередині пачок автомобілів у міру видалення регульованого перехрестя. Такий підхід тісно пов'язаний із вирішенням питання про поступовий розпад пачок, а отже, можливості організації координованого управління рухом транспорту.
Експерименти, поставлені деякими дослідниками, показують, що найбільш підходящим для опису часових інтервалів усередині пачок є нормований розподіл Ерланга.
F (d t ) =
l ( K + 1)
k
L l ( K + 1) d t . (1.2)
C матема т і чес к им очікуванням:
З дисперсією:
M k
D k =
1 . (1 . 3)
1 . (1 . 4)
l 2 ( K + 1)
На користь даного розподілу говорить той факт, що, задаючись різними Kможна отримати будь-який ступінь наслідку, отже, відобразити ступінь зв'язаності потоку всередині пачки. Ефект розпаду пачок обумовлює залежність середньої інтенсивності руху всередині пачок l та порядку розподілу K від відстані пачки до вихідного перехрестя. Експериментальні дослідження показали, що зменшення l і K у міру видалення пачки від перегону добре апроксимується експоненційною залежністю
- H L
l n (L n ) = l + ( l н ас
L c ) L 1
n . (1.5)
K = [
K c + (K
на з
- K c
) L - H 2 L n
де l - Середня інтенсивність руху по всьому потоку;
l н а з –
інтенсивність усередині пачки при виході її з перехрестя;
L n – р ас т о я н я
пачки від перехрестя;
K н а з – ма к с і ма ль ний по рядок розпи д е л е ня
Ерл а н га д ля п а чк і, т о л к о ч ч о т о в о д о д ший з пе ре к рістка; K c
- Порядок
роз ділення Е рл а н га по пот о к у п о с л о к ч ча т е л ь л о го роз ділення та
злиття пачок;
H 1 , H 2 – до ефф іці е н ти р а с д е н ня ч о к д ля
l n (l n )
і K ;
у квадратних дужках – ціла частина виразу.
Експерименти показують, що для пачки, що тільки-но вийшла з перехрестя, величина K=9.
Практичні дослідження з використанням АСУД у містах: Харкові, Мінську, Красноярську, Нижньому Новгороді та ін., проведені у
80 - 90 рр.., Дозволили отримати представницькі статистичні дані про транспортний потік.
Аналіз розподілу інтервалів за різних інтенсивностей, а також мінімально допустимі інтервали між автомобілями вказують на існування трьох груп автомобілів у транспортному потоці:
üавтомобілі, що рухаються вільно, не впливають один на одного при інтервалах більше 8 с;
üчастково пов'язані автомобілі, що рухаються з інтервалом 1,5 –
8,0; розподіл інтервалів такий, що водії окремих автомобілів мають можливість маневрувати всередині потоку;
üпов'язана частина потоку; у цьому випадку протягом усього часу
спостерігаються лише малі інтервали порядку 1,0 – 1,3 с.
На практиці автомобілі, що рухаються вільно, спостерігаються при інтенсивності до 300 автомобілів на годину на смугу. Частково пов'язані автомобілі спостерігаються за інтенсивності близько 300 – 600 автомобілів на годину на смугу. Пов'язаний потік спостерігається за інтенсивності понад 600 автомобілів на годину на смугу.
Одним із важливих завдань транспортної системи є забезпечення максимальної ефективності керування транспортно-дорожнім комплексом. Для цього необхідно використовувати сучасні рішення, до яких відносяться засоби відображення інформації. У статті наведено опис кількох проектів, де для демонстрації відомостей про дорожній рух були використані пристрої від компанії Mitsubishi Electric.
Термін корисної експлуатації центру управління дорожнім рухом у середньому становить щонайменше 10 років. Очевидно, що за цей час розробники ITS неминуче зіткнуться з проблемою модернізації компонентів, що виробили свій ресурс. Адже існуючу інфраструктуру не так легко перебудувати. Створення універсальних пристроїв - це ключовий підхід, який дозволяє пристосуватися до правил гри, що змінюються, і розвитку технологій.
Яким чином можна реалізувати принцип універсальності у системах відображення інформації, що використовуються у центрах управління? Одним із рішень цього завдання є модульний підхід до обладнання: дисплей розглядається не як єдине ціле, а як підсистема, що складається із взаємозамінних компонентів.
В даний час у більшості сучасних центрів управління використовуються DLP-куби зворотної проекції, побудовані на основі технології DMD (розроблена компанією Texas Instruments).
Дотримуючись принципу універсальності, компанія Mitsubishi створила модельний ряд дисплеїв та супутнього обладнання, в якому використовуються новітні технології, що базуються на загальній архітектурі та однаковому наборі компонентів. Зокрема, системи 70-ї та 120-ї серій складаються з DLP-кубів та РК-дисплеїв з тонкою лицьовою панеллю різних розмірів та конфігурації. Як і в разі визначення конфігурації персонального комп'ютера, користувач при замовленні обладнання може вказати компоненти, з яких повинна складатися система, - з можливістю її модернізації в міру зміни потреб. Як приклад можна навести проекційний блок. Два роки тому Mitsubishi Electric запустила нову лінійку DLP-проекторів, які дають можливість замінити відеостіни, що знаходяться в експлуатації, з ртутними лампами на новітні світлодіодні системи підвищеної яскравості. Ця технологія дозволяє покращити якість зображення, суттєво продовжити термін служби діючих систем та мінімізувати витрати на технічне обслуговування.
Термін служби ртутних ламп становить середньому 6000 годин, т. е. менше року роботи у цілодобовому режимі. За середньої вартості лампи в €1000 це спричиняє значні експлуатаційні витрати. Навпаки, очікуваний термін служби світлодіодних кубів моделі 50PE78 виробництва Mitsubishi Electric складає 100 000 годин, тобто понад 10 років безперервної роботи у цілодобовому режимі. Застосування світлодіодних кубів у поєднанні з малошумними вентиляторами повітряного охолодження, також розрахованими на 100 000 годин роботи, практично усуває необхідність поточного технічного обслуговування дисплея протягом більшої частини експлуатаційного терміну. Крім того, DLP-куби зі світлодіодним підсвічуванням мають більш широку колірну гамму і зберігають постійну колірну температуру протягом усього терміну служби. Це, у свою чергу, означає покращення кольору та підвищену стабільність.
Реалізований в Італії проект дає гарний приклад того, як інженери використовують універсальні компоненти системи відображення інформації, щоби обійти інфраструктурні обмеження.
Компанія Autostrada del Brennero є оператором автомагістралі A22, що проходить від Модена до перевалу Бреннер (на кордоні Італії та Австрії). Вважаючи діючу аналогову систему відображення інформації в центрі управління застарілою і занадто дорогою в обслуговуванні, компанія вирішила її модернізувати з використанням новітніх цифрових технологій. Існуюча на той момент система контролю з 200 аналоговими камерами та призначена для керування нею програмна платформа були цілком працездатними. Крім того, компанія прагнула уникнути додаткових витрат та відриву операторів від роботи з метою їхньої перепідготовки. 3P Technologies, компанія з комплексування технічних та програмних засобів, розробила рішення, що поєднало в собі новітні технології відображення з системою контролю та програмною платформою.
Пункт управління автомагістралі A22 (рис. 1) знаходиться в самому центрі складної та високотехнологічної системи управління дорожнім рухом, що включає близько 200 камер відеоспостереження, моніторів і точок екстреного зв'язку, пов'язаних волоконно-оптичним кабелем, радіоканалами, а також лініями проводового зв'язку. Управління системою здійснюється за допомогою спеціально розробленої програмної платформи, яка у разі аварії дозволяє операторам контролювати вхідні дані або будь-яку інформацію, що завантажується з камер. Також в систему вбудована інноваційна функція автоматичної фіксації подій дорожнього руху (AID), яка дає можливість аналізувати дані, що надходять з камер і датчиків, і в автоматичному режимі реагувати на позаштатні ситуації. Крім подачі звукового сигналу, система здійснює запис події та реєструє події, що трапилися незадовго до нього. Це дозволяє операторам відновити інцидент, що стався, в динаміці.

Мал. 1. Диспетчерський пункт керування автомагістраллю А22
p align="justify"> При розробці проекту модернізації основна проблема полягала в дисплеї, що використовується для контролю системи. дисплей, Що Складається з аналогових РК-екранів, не в змозі обробляти інформацію необхідного типу і обсягу, а також був доріг в експлуатації. Діюча система була замінена відеостіною зі світлодіодних кубів Mitsubishi Electric 70-ї серії, що дозволило підвищити якість та ефективність керування, а також знизити витрати на технічне обслуговування.
Процесор X-Omnium компанії Bilfinger-Mauell, що використовується для управління дисплеями, забезпечив універсальність щодо способів і місця відображення контенту. Якщо раніше оператори були обмежені щодо вибору розмірів відображення, то тепер вони можуть організувати виведення контенту у вигляді вікон у будь-якому місці екрана. При цьому контролер із сенсорним екраном Crestron дозволяє операторам викликати готові сценарії за допомогою простого сенсорного інтерфейсу, розробленого компанією 3P Technologies.
П'ять декодерів Bilfinger-Mauell надають інтерфейс для існуючої системи аналогових відеокамер, що дає операторам можливість використовувати звичні елементи керування приводом нахилу/повороту та масштабування. Важливо, що контролер X-Omnium дозволяє керувати самим дисплеєм за допомогою наявного пакета програм контролю дорожнього руху.
Ще один приклад проекту – центр моніторингу дорожнього руху «Сенатра» (рис. 2), розташований в Андоррі, в районі східних Піренеїв на кордоні з Іспанією та Францією.

Мал. 2. Центр моніторингу дорожнього руху «Сенатра»
Князівство Андорра – одне з найпопулярніших зимових туристичних місць у Європі завдяки численним гірськолижним схилам. Високий транспортний потік (до 27 000 машин на день) і необхідність особливої пильності, зумовленої зимовими умовами, зробили дисплейну систему центру та 60 мережевих відеокамер життєво важливою умовою надійного контролю за безпекою на 100 км основної дороги та 150 км другорядних доріг, що знаходяться під центру. Для цього також було використано DLP-куби від Mitsubishi Electric.
Звернемося до іншого проекту. У 2015 р. Highways England розширила можливості Східного регіонального центру управління, розташованого у Південному Міммсі. Серед семи регіональних центрів компанії східний є одним із найбільших. Він відповідає за управління рухом на дорогах, що належать до найжвавіших в Європі, включаючи південну ділянку траси М25 і ряд ділянок трас M40, M1 і M4.
Центральне місце в диспетчерській залі (рис. 3), що містить 20 обладнаних робочих місць операторів, займає велика відеостіна. На ній оператори можуть бачити зображення з будь-якої з 870 камер спостереження за дорожньою мережею, а також переглядати відео та потоки даних, що отримуються від інших дорожніх агентств, та приймати трансляції безпосередньо з ефіру тимчасово встановлених камер.

Мал. 3. Диспетчерська зала Східного регіонального центру управління рухом
Східний регіональний центр управління працює у режимі 24/7. У рамках розширення центру було ухвалено рішення про модернізацію відеостіни, і для реалізації проекту було обрано фірму Electrosonic. Основною метою проекту, поряд із встановленням більш високопродуктивного дисплея, було впровадження новітніх технологій з метою суттєвого зниження витрат на експлуатацію відеостіни.
Реалізована система побудована на основі DLP-відеокубів Mitsubishi Electric моделі VS-67PE78 з діагоналлю 67″ у конфігурації 8×3. Вона дозволяє підвищити роздільну здатність головної відеостіни з XGA до SXGA+, поліпшити яскравість і значно збільшити термін служби - до 100 000 годин для світлодіодних джерел світла та інших компонентів.
Описані проекти показують, що будь-який проектуючий систему інженер повинен ставити в основу принцип універсальності - особливо з урахуванням майбутньої революції міжмашинної взаємодії.
Управління дорожнім рухом – комплекс заходів, спрямованих на формування оптимальних режимів дорожнього руху.
Будівельний словник.
Дивитись що таке "Управління дорожнім рухом" в інших словниках:
центр управління дорожнім рухом- Оперативний центр, що забезпечує єдине управління Олімпійськими транспортними потоками та координацію роботи ФНД «Транспорт», місцевих транспортних служб та правоохоронних органів. [Департамент лінгвістичних послуг Оргкомітету. Довідник технічного перекладача
Англ. Royal Bhutan Police Зона охоплення … Вікіпедія
ЦУДД- центр управління дорожнім рухом ЦУДД центральне управління дорожнім рухом Джерело: http://www.logistic.ru/news/2008/4/4/17/108201.html …
Робочий стіл QNX 6 (Neutrino) … Вікіпедія
– (ДААТ) (до 2003 року Донецький автомобільний коледж) приватний вищий навчальний заклад. Здійснює навчання за такими напрямами та спеціальностями: Напрямок «Автомобільний транспорт». Кваліфікація інженер механік.
Цей термін має й інші значення, див. Сідней (значення). Місто Сідней Sydney … Вікіпедія
Донецька академія автомобільного транспорту (ДААТ) (до 2003 року – Донецький автомобільний коледж) приватний вищий навчальний заклад. Виробляє навчання за такими напрямами та спеціальностями: Напрямок «Автомобільний транспорт».
- (вимовляється джи ді еф, рус. літер. Файли географічних даних) або GDF формат обміну географічними даними. На відміну від загальних форматів ГІС, GDF надає детальні правила для запису даних та їх подання, а також вичерпний… … Вікіпедія
Австралія- (Australia) Історія Австралії, державна символіка Австралії, культура Австралії Виконавча та законодавча влада Австралії, клімат Австралії, природні ресурси та жива природа Австралії, найбільші економічні центри Австралії… Енциклопедія інвестора
УДД- управління дорожнім рухом транспорт … Словник скорочень та абревіатур