長い間、AM に基づく非規制電気ドライブが産業界で使用されてきましたが、最近では、非同期モーターの速度調整。
ローターの回転数は、
![]()
この場合、同期回転速度は電圧周波数と極対の数に依存します。
これに基づいて、血圧の速度は、滑り、周波数、極対の数を変更することによって調整できると結論付けることができます。
主な調整方法を見てみましょう。
ローター回路内のアクティブ抵抗を変化させることによる速度制御
この速度制御方法は以下の用途に適用できます。巻線ローターを備えたモーター。 この場合、加減抵抗器がローター巻線回路に接続され、抵抗が徐々に増加する可能性があります。 抵抗が増加すると、エンジンのスリップが増加し、速度が低下します。 これにより、速度は本来の特性よりも下方に調整されます。
この方法の欠点は、滑りが増加するとローター回路の損失が増加し、エンジン効率が低下するため、不経済であることです。 また、エンジンの機械特性がよりフラットかつソフトになるため、シャフトにかかる負荷トルクのわずかな変化で回転速度が大きく変化します。

この方法での速度制御は効果的ではありませんが、それにもかかわらず、巻線ローターを備えたモーターで使用されます。
供給電圧を変更してモーター速度を調整する

この制御方法は、単巻変圧器を回路のステータの前、電源線の後に接続することによって実装できます。 同時に、単巻変圧器の出力電圧を下げると、エンジンは低下した電圧で動作します。 これにより、一定の負荷トルクではエンジン速度が低下し、エンジンの過負荷容量も低下します。 これは、電源電圧が低下すると、モーターの最大トルクが 2 乗で減少するためです。 さらに、このトルクはローター回路の電流よりも早く減少します。これは、モーターが加熱されて損失も増加することを意味します。
電圧を変更することによる調整方法は、エンジンの大きな損失、過熱、故障につながる可能性があるため、電圧を公称電圧よりも高くすることは不可能であるため、自然特性から下方にのみ可能です。
単巻変圧器に加えて、サイリスタ電圧調整器を使用することもできます。
電源周波数変更による速度制御

この制御方法では、周波数変換器 (FC) がモーターに接続されます。 ほとんどの場合、これはサイリスタ周波数コンバータです。 この場合、モーターの同期回転速度に影響を与えるため、速度制御は電圧周波数 f を変更することによって実行されます。
電圧周波数が低くなるとモータの過負荷耐量が低下するため、これを防ぐために電圧U1を高くする必要があります。 増やす必要がある値はドライブによって異なります。 シャフト上の一定の負荷トルクで調整が実行される場合、周波数の変化に比例して(速度が低下するにつれて)電圧を変更する必要があります。 速度を上げるときは、電圧を定格値に保つ必要があります。そうしないと、エンジンが損傷する可能性があります。
一定のエンジン出力で速度制御を実行する場合 (金属切断機など)、電圧 U 1 の変化は周波数 f 1 の変化の平方根に比例する必要があります。
ファン特性を備えた設備を調整する場合、供給電圧 U 1 を周波数 f 1 の変化の 2 乗に比例して変更する必要があります。
周波数変更による調整は、大幅な損失を発生させずに、モータの過負荷能力を低下させることなく、広範囲にわたる速度制御を提供するため、非同期モータにとって最も受け入れられるオプションです。
極対の数を変えることによる血圧速度の調整
この制御方法は、かご型ロータを備えた多速度非同期モータでのみ可能です。これは、このロータの極数がステータ極の数と常に等しいためです。
上で説明した式によれば、極対の数を変更することでモーターの速度を調整できます。 さらに、極の数は特定の値(1、2、3、4、5)のみを取るため、速度の変化は段階的に発生します。
極数の変更は、固定子巻線のコイル グループを切り替えることによって実現されます。 この場合、コイルは「スター-スター」または「スター-ダブルスター」などのさまざまな接続方式を使用して接続されます。 最初の接続図では、極数が 2:1 の比率で変化します。 これにより、切り替え中にエンジン出力が一定に保たれます。 2 番目の回路は、同じ比率で極の数を変更しますが、同時に一定のモーター トルクを提供します。
この制御方法の使用は、スイッチング中の効率と力率を維持することによって正当化されます。 欠点は、エンジンの設計がより複雑かつ大型になり、コストが増加することです。
スムーズな加速と制動には電気モーターが必要です。 このような装置は産業界で広く使用されています。 彼らの助けを借りて、ファンの回転速度が変更されます。 12 ボルトモーターは制御システムや自動車に使用されます。 誰もが車のストーブファンの回転数を変えるスイッチを見たことがあるでしょう。 レギュレーターの一種です。 スムーズに動作するように設計されていないだけです。 回転速度が段階的に変化します。
周波数変換器の応用
周波数コンバータは速度調整器および 380V として使用されます。 これらは、電流の特性 (信号の形状と周波数) を根本的に変更できるハイテク電子デバイスです。 これらは強力な半導体トランジスタとパルス幅変調器に基づいています。 デバイスのすべての動作はマイクロコントローラー ユニットによって制御されます。 エンジンローターの回転速度が滑らかに変化します。
したがって、それらは負荷のかかる機構で使用されます。 加速が遅いほど、コンベヤやギアボックスにかかる負荷は少なくなります。 すべての周波数発生器には、電流、負荷、電圧などに対するいくつかの段階の保護が装備されています。 周波数変換器の一部のモデルは単相から電力を供給され、それを三相に変換します。 これにより、複雑な回路を使用せずに、家庭で非同期モーターを接続できます。 また、このようなデバイスを使用するときに電力が失われることはありません。
レギュレーターはどのような目的で使用されますか?
非同期モーターの場合、速度コントローラーは次の目的で必要です。
- 大幅なエネルギー節約。 結局のところ、すべてのメカニズムで高いモーター回転速度が必要なわけではありません。場合によっては 20 ~ 30% 削減でき、これによりエネルギーコストが半分に削減されます。
- 機構や電子回路の保護。 周波数変換器を使用すると、温度、圧力、その他の多くのパラメーターを制御できます。 エンジンがポンプ駆動として動作する場合、空気または液体を送り込むコンテナに圧力センサーを取り付ける必要があります。 最大値に達すると、モーターは単にオフになります。
- ソフトスタートを実行する。 追加の電子機器を使用する必要はなく、周波数変換器の設定を変更するだけですべてを行うことができます。
- メンテナンスコストの削減。 このような 220V 電気モーター用の速度コントローラーの助けを借りて、ドライブや個々の機構の故障のリスクが軽減されます。

周波数変換器を構築するための回路は、多くの家庭用電化製品に広く普及しています。 同様のものは、無停電電源装置、溶接機、電圧安定装置、コンピュータ、ラップトップ、携帯電話の充電器用の電源、現代の液晶テレビやモニターのバックライトランプ用の点火装置などにも見られます。
ロータリーコントロールはどのように機能しますか?
電気モーターの速度コントローラーを自分の手で作ることもできますが、これを行うには、すべての技術的側面を勉強する必要があります。 構造的には、次のようないくつかの主要コンポーネントを区別できます。
- 電気モーター。
- マイクロコントローラー制御システムとコンバーターユニット。
- ドライブとそれに関連するメカニズム。
動作の開始直後、巻線に電圧が印加された後、モーターの回転子は最大出力で回転します。 非同期マシンを他のマシンと区別するのはこの機能です。 これに駆動される機構からの負荷が加わります。 その結果、初期段階では消費電力と消費電流が最大まで増加します。

多量の熱が発生します。 巻線とワイヤの両方が過熱します。 周波数変換器を使用すると、この問題を解決できます。 ソフトスタートを設定した場合、エンジンはすぐには最大速度 (これもデバイスによって調整され、1500 rpm ではなく 1000 rpm になる場合があります) まで加速しませんが、10 秒以内に加速します (毎秒 100 ~ 150 rpm ずつ増加します)。 )。 同時に、すべてのメカニズムとワイヤーにかかる負荷が大幅に減少します。
自作レギュレーター
12V 電気モーター用のスピード コントローラーを独自に作成できます。 これには、マルチポジションスイッチと巻線抵抗が必要になります。 後者の助けを借りて、供給電圧 (およびそれに伴って回転速度) が変化します。 同様のシステムを非同期モーターにも使用できますが、効率は低くなります。 何年も前には、ギアドライブまたはバリエータをベースとした機械式レギュレータが広く使用されていました。 しかし、それらはあまり信頼できるものではありませんでした。 電子的手段ははるかに優れたパフォーマンスを発揮します。 結局のところ、それらはそれほどかさばらず、ドライブを微調整することができます。

電気モーターの回転コントローラーを作成するには、店舗で購入するか、古いインバーターデバイスから取り外すことができるいくつかの電子デバイスが必要です。 VT138-600 トライアックは、このような電子機器の回路で優れた結果を示します。 調整するには、回路に可変抵抗器を組み込む必要があります。 これにより、トライアックに入力される信号の振幅が変化します。
管理システムの導入

最も単純なデバイスのパラメータを改善するには、電気モーターの速度コントローラー回路にマイクロコントローラー制御を組み込む必要があります。 これを行うには、センサー、ボタン、電子キーを接続するために、適切な数の入力と出力を備えたプロセッサーを選択する必要があります。 実験には、最も一般的で使いやすい AtMega128 マイクロコントローラーを使用できます。 このコントローラーを使用する多くのスキームがパブリック ドメインで見つかります。 自分でそれらを見つけて実際に適用することは難しくありません。 正しく動作させるには、特定のアクションに対する応答となるアルゴリズムを書き込む必要があります。 たとえば、温度が 60 度 (デバイスのラジエーターで測定) に達したら、電源を切る必要があります。
ついに
デバイスを自分で作成するのではなく、既製のデバイスを購入する場合は、電力、制御システムの種類、動作電圧、周波数などの主要なパラメータに注意してください。 モーター電圧レギュレーターを使用する予定の機構の特性を計算することをお勧めします。 周波数変換器のパラメータと比較することを忘れないでください。
旋盤の大規模なオーバーホールが進行中です。 メインエンジン - 2速
非同期モーター用の周波数コンバーターが贅沢品だった当時 (20 年以上前)、産業用機器では必要に応じて速度を調整できる DC モーターが使用されていました。
この方法は面倒だったので、同時に別のより単純な方法が使用されました。2 速度 (マルチスピード) モーターが使用され、ダーランダー回路に従って特定の方法で巻線が接続および切り替えられました。回転速度を変更します。
電子制御可変速 DC モーターは、高価値の産業用機器に使用されています。 しかし、2 速モーターは 1980 年代にソ連で製造された中価格帯の機械に搭載されています。 私自身も、混乱と情報不足のため、接続に問題がありました。
最新の例は特殊旋盤です。 処刑、製材所。 詳細は以下になります。
巻線の設計はデルタ接続に似ているため、スイッチングはスターデルタ接続に関連付けることができます。 そしてそれは混乱します。
「スターデルタ」回路はモーターの始動を容易にするために使用され(両方のモードの速度は同じです!)、巻線スイッチング付きの 2 速モーターは動作速度のスイッチングに使用されます。
2 つのエンジンだけでなく、さらに多くの速度を備えたエンジンもあります。 しかし、私が個人的に接続し、手に持ったものについて話します。

理論を減らして実践を増やしましょう。 いつものように、単純なものから複雑なものまで。
2速非同期電動機
2 速モーターの巻線は次のようになります。

2 速モーターの図
このようなモーターの端子 U1、V1、W1 を三相電圧に接続すると、減速された速度で「三角形」に接続されます。
また、端子 U1、V1、W1 が相互に接続され、端子 U2、V2、W2 に電力が供給されると、「星」(YY) が 2 つ獲得され、速度は 2 倍になります。
三角形 U1、V1、W1 の頂点と辺 U2、V2、W2 の中点の巻きを交換するとどうなるでしょうか? 名前の問題だけで何も変わらないと思います。 とはいえ、試したことはありません。 知っている人がいたら、記事のコメントに書いてください。
接続方式
非同期電気モーターを三相ネットワークに接続する方法に少し慣れていない方は、私の記事「電磁接触器を介したモーターの接続」を読むことを強くお勧めします。 読者は、電気モーターがどのようにオンになるのか、なぜ、どのようなモーター保護が必要なのかを知っていると思いますので、この記事ではこれらの質問を省略します。
(adsbygoogle = window.adsbygoogle || ).push());
理論的にはすべてが簡単ですが、実際には頭を悩ませる必要があります。
明らかに、巻線をオンにすることは、スイッチを介する方法と接触器を介する 2 つの方法で行うことができます。
スイッチで速度を変える
まず、PKP-25-2 タイプのスイッチを介した、より単純な回路を考えてみましょう。 さらに、これらは私が出会った唯一の概略図です。
スイッチには 3 つの位置があり、そのうちの 1 つ (中央) はエンジンの停止に対応します。 スイッチデバイスについては少し後です。

2 速モーターを接続します。 コントロールパネルのスイッチの図。
SA1 スイッチ位置の点線の×印は接点の閉状態を示します。 あれは、 位置 1 L1、L2、L3 からの電力が三角形 (ピン U1、V1、W1) に供給されます。 ピン U2、V2、W2 は未接続のままです。 エンジンは最初の減速された速度で回転します。
SA1切り替え時 位置2へピン U1、V1、W1 は相互に接続され、U2、V2、W2 に電源が供給されます。
コンタクタを使用したスイッチング速度
コンタクタの使用を開始すると、回路は次のようになります。

コンタクタを使用してさまざまな速度でモーターをオンにするスキーム
ここで、モーターは 1 速でコンタクタ KM1 をオンにし、2 速で KM2 をオンにします。 5 つの電源接点を一度に閉じる必要があるため、物理的に KM2 が 2 つのコンタクタで構成されている必要があることは明らかです。
実用化
実際には、PKP-25-2 スイッチ上の回路のみに遭遇しました。 これはソビエト交換機の普遍的な奇跡であり、接触の組み合わせは何百万通りもあり得る。 中にはカムが入っていて(形状のバリエーションもいくつかあり)、組み替えることができます。
これは、高い意識の集中を必要とする本物のパズルと判じ絵です。 各接点が小さなスロットから見えるので、いつ閉じているか開いているかがわかるのは良いことです。 さらに、ハウジングのこれらのスロットを通じて接点を洗浄できます。
複数の位置が存在する可能性がありますが、その数は写真に示されている停止位置によって制限されます。

バッチスイッチ PKP-25-2
PKP スイッチ 25. 誰でも楽しめるパズル。

バッチスイッチ PKP-25-2 - 接点
実用
すでに述べたように、私はソビエトの機械でそのようなエンジンに遭遇し、修復しました。
それは、2速非同期モーター4AM100L8/4U3を使用した円形木工機TsA-2A-1です。 その主なパラメータは、最初の速度(三角形)700 rpm、電流5.0 A、電力1.4 kW、星-1410 rpm、電流5.0 A、電力2.4 kWです。
木材や丸鋸の切れ味に合わせて、いくつかの速度を調整するように依頼されました。 しかし残念なことに、周波数変換器がなければこれを行うことはできません。
もう一人の老人は特別設計の旋盤 UT16P で、720/1440 rpm、8.9/11 A、3.2/5.3 kW のエンジンを搭載しています。

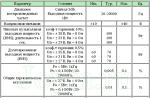
2速電動機11kW旋盤の銘板
切り替えもスイッチで行い、マシン図は次のようになります。

旋盤の電気図
この図には、まさに記事の主題に沿った誤りがあります。 まず速度切り替えはリレーP2ではなくスイッチB2で行います。 そして第二に(そして最も重要なことですが)、スイッチング図は現実にまったく対応していません。 そして彼女は私を混乱させたので、私はそれを使って接続しようとしました。 この図を作成するまで:

UT16P 旋盤の 2 速モータをオンにするための実際の回路図
さらに、電気回路要素の外観と位置。

旋盤図-外観

旋盤の電気図 - 要素の配置
それだけです。
友達! このようなマシンやエンジンに出会った人は、書いたり、経験を共有したり、質問したりしていただければ、私は喜びます。
ほぼすべての機械には、電気駆動装置として非同期モーターが装備されています。 シンプルなデザインと低コストが特徴です。 この点で、非同期モーターの速度を調整することが重要です。 ただし、標準的なスイッチング方式では、その速度は機械的な伝達システム (ギアボックス、プーリー) を使用してのみ制御できるため、必ずしも便利であるとは限りません。 ローター速度の電気制御には、非同期モーターの配線図が複雑になりますが、さらに多くの利点があります。
自動機器の一部のコンポーネントでは、非同期電動機シャフトの回転速度の電気制御が適しています。 これが、動作モードをスムーズかつ正確に調整する唯一の方法です。 周波数、電圧、電流形状を操作して回転速度を制御するには、いくつかの方法があります。 それらはすべて図に示されています。
図に示されている方法のうち、ローター速度を調整する最も一般的な方法は、次のパラメーターを変更することです。
ステータに供給される電圧、
・ローター回路の補助抵抗、
極のペアの数、
· 動作電流の周波数。
最後の 2 つの方法では、効率を大幅に低下させたりパワーを損失したりすることなく回転速度を変更できますが、残りの調整方法では、スリップ量に比例して効率が低下します。 しかし、どちらにも長所と短所があります。 かご型ローターを備えた非同期モーターは生産現場で最もよく使用されるため、これ以降の議論はすべてこの特定のタイプの電気モーターに関するものになります。
 のために 周波数調整主に半導体コンバータが使用されます。 それらの動作原理は、ステータ磁界の回転周波数が供給電圧の周波数に依存するという、非同期モータの動作の特殊性に基づいています。 ステータフィールドの回転速度は、次の式で決定されます。
のために 周波数調整主に半導体コンバータが使用されます。 それらの動作原理は、ステータ磁界の回転周波数が供給電圧の周波数に依存するという、非同期モータの動作の特殊性に基づいています。 ステータフィールドの回転速度は、次の式で決定されます。
n1 = 60f/p、ここで、n1 は界磁回転周波数 (rpm)、f は電源ネットワークの周波数 (Hz)、p は固定子極のペアの数、60 は寸法変換係数です。
非同期電動機を損失なく効率的に動作させるには、周波数とともに供給電圧を変更する必要があります。 負荷トルクに応じて電圧は変化します。 負荷が一定の場合、電圧は周波数に比例して変化します。
最新の周波数レギュレーターを使用すると、広範囲で速度を減速したり増加したりできます。 これにより、多接触溶接メッシュ機械など、制御されたブローチ加工を備えた装置で広く使用されるようになりました。 これらでは、巻取りシャフトを駆動する非同期モーターの回転速度は、半導体コンバーターによって制御されます。 この調整により、技術的操作が正しく実行されているかを監視するオペレータは、機械の調整に応じて速度を上げたり、速度を落としたりすることができます。
周波数変換器の動作原理をさらに詳しく見てみましょう。 これは二重変換の原理に基づいています。 レギュレータは、整流器、パルスインバータ、制御システムで構成されます。 整流器では、正弦波電圧が直流電圧に変換され、インバータに供給されます。 電力用三相パルスインバータには 6 個のトランジスタ スイッチが含まれています。 これらの自動スイッチを通じて、固定子巻線に定電圧が供給されるため、適切な瞬間に順電流または逆電流が 120°の位相シフトで対応する巻線に供給されます。 したがって、直流電圧は、必要な振幅と周波数の交流三相電圧に変換されます。
必要なパラメータは制御モジュールを介して設定されます。 キーの自動調整はパルス幅変調の原理に従って実行されます。 パワースイッチとしてパワーIGBTトランジスタを使用しています。 サイリスタと比較して、スイッチング周波数が高く、歪みを最小限に抑えてほぼ正弦波の電流を生成します。 このような装置の実用性にもかかわらず、中出力および高出力エンジンのコストは依然として非常に高いです。
 非同期モータの回転速度をこの方法で調整する 極対数の変化また、かご型ローターを使用して電気モーターを制御する最も一般的な方法も指します。 このようなモーターはマルチスピードと呼ばれます。 このメソッドを実装するには 2 つの方法があります。
非同期モータの回転速度をこの方法で調整する 極対数の変化また、かご型ローターを使用して電気モーターを制御する最も一般的な方法も指します。 このようなモーターはマルチスピードと呼ばれます。 このメソッドを実装するには 2 つの方法があります。
· ステータの共通スロットに、異なる数の極対を持つ複数の巻線を一度に配置します。
· 既存の巻線を必要な数の極ペアに切り替える機能を備えた特別な巻線の使用。
前者の場合、追加の巻線をスロットに取り付けるために、ワイヤの断面積を小さくする必要があり、これにより電動モーターの定格出力が低下します。 2 番目の場合、特に 3 速以上の場合、スイッチ装置が複雑になり、エネルギー特性も悪化します。 非同期モーターの速度を調整するこの方法と他の方法については、ページの下部からダウンロードできるアーカイブ ファイルで詳しく説明されています。
通常、多速度モーターは 2、3、または 4 の回転速度で製造され、2 速度モーターはステーターに 1 つの巻線を使用し、極対の数を 2:1 = p2:pt, 3 の比率で切り替えて製造されます。 - 速度モーター - ステーターに 2 つの巻線があり、その 1 つが 2:1 = Pr:Pi のスイッチングで実行されます。 4 速度モーター - ステーターに 2 つの巻線があり、それぞれの極対の数を切り替えて実行されます。 2:1の比率で。 多速度電気モーターは、さまざまな工作機械、貨物用および旅客用エレベーターに装備されており、ファンやポンプなどの駆動に使用されます。
3. 巻線ロータを備えた三相非同期モータの始動の非可逆制御のスキーム。
http://www.ngpedia.ru/pngs/016/0166rYE3L7C0J713C9B4.png\
3) 3 つのタイムリレー /РВ、2PS、および ЗРВ 振り子タイプ、それぞれコンタクタ K、/U、および 2U と機械的に結合されています。
4) 「停止」ボタンと「開始」ボタン。
初期位置では、エンジンがオフになると、すべてのコンタクタがオフになり、始動レオスタットの 3 つのステージすべての合計抵抗 gr1 + rp2 + grz が各ローター位相の回路に含まれます。 「スタート」ボタンが押されると、コンタクタコイル回路 K が閉じ、コンタクタが作動し、ロータ回路の全抵抗でエンジン始動の第 1 段階が始まります。 コンタクタ K がトリガーされると、機械的に結合されたタイム リレー IP B が作動します。/) 秒後、このリレーはコンタクタ スイッチング コイル /U の回路内の接点を閉じます。
コンタクタ 1U がトリガーされ、加減抵抗器の 2 つのステージの抵抗 r2 + rn3 がモーター ローター回路でオンのままになります。 これにより、エンジン始動の第 2 段階が始まります。 コンタクタ /U はそれに結合されているリレー 2РВ を作動させ、12 秒後にコンタクタ 2U のコイル回路の接点を閉じます。 コンタクタ 2U が動作し、加減抵抗器の第 2 ステージをオフにします。 ロータ回路では、負荷抵抗のみがオンのままとなり、コンタクタ 2U が ZRV リレーを作動させ、ta 秒後に充電器のコンタクタ コイルの回路が閉じます。 後者が機能してモーターのローター巻線を短絡させ、エンジンの始動プロセスを完了します。
エンジンを切るときは「停止」ボタンを押す必要があります。 この場合、コンタクタ K、/U、2U、ZU のコイルは電力を失います。 接触器がオフになり、回路全体が元の位置に戻ります。
非同期モーターの比較的単純な制御回路については上で説明しました。 実際には、DC および AC モーターによる電気駆動装置の始動、制動、速度の調整および安定化のプロセスを制御するために、より複雑な回路も使用されます。
米。 18 8. 巻線ロータを使用した不可逆非同期モータを起動するための制御回路
4. 内部統制システム
開閉装置(RU) - 1 つの電圧クラスの電気エネルギーを受け取り、分配するために使用される電気設備。
開閉装置には、一連のスイッチング デバイス、補助リレー保護および自動化デバイス、計測および測定機器が含まれています。
モーターシャフトの回転方向を変更する必要がある場合があります。 これには逆接続図が必要です。 そのタイプは、直流または交流、220V または 380V など、モーターの種類によって異なります。 また、単相ネットワークに接続された三相モーターの逆は、まったく異なる方法で配置されます。
三相非同期電動機を可逆的に接続するには、逆転せずに接続するための回路図をベースにします。
この方式により、シャフトは一方向、つまり前方にのみ回転できます。 それを別のフェーズに変えるには、任意の 2 つのフェーズの位置を交換する必要があります。 しかし、電気工学では、A を C に変更し、B を C に変更しても同じ結果が得られるにもかかわらず、A と B のみを変更するのが通例です。

接続するには、さらに次のものが必要です。
- 磁気スターター (またはコンタクター) – KM2;
- 3 ボタン ステーション。2 つの常閉接点と 1 つの常開接点で構成されます (Start2 ボタンが追加されました)。
重要!電気工学では、常閉接点とは、不平衡状態が 2 つだけある押しボタン接点の状態を指します。 最初の位置 (通常) は動作中 (閉)、2 番目の位置はパッシブ (開) です。 常開接点の概念も同様に定式化されます。 最初の位置ではボタンはパッシブになり、2 番目の位置ではアクティブになります。 このようなボタンは「STOP」と呼ばれ、他の 2 つのボタンは「FORWARD」と「BACK」であることは明らかです。

逆接続スキームは単純なものとほとんど変わりません。 主な違いは電気ロックです。 モーターが両方向に同時に起動すると故障の原因になりますので、防止する必要があります。 構造的には、インターロックは制御回路に接続された磁気スターター端子を備えたブロックです。
エンジンを始動するには:
- マシン AB1 と AB2 の電源を入れます。
- Start1 (SB1) ボタンを押してシャフトを時計回りに回転させるか、Start2 (SB2) ボタンを押してシャフトを反対方向に回転させます。
- エンジンは作動しています。
方向を変える必要がある場合は、まず「STOP」ボタンを押す必要があります。 次に、別のスタートボタンをオンにします。 電気ロックにより、モーターのスイッチがオフにならない限り作動しません。
可変ネットワーク: 電動モーター 220 からネットワーク 220
220V 電気モーターの逆転は、巻線端子がハウジングの外側にある場合にのみ可能です。 以下の図は、始動巻線と作動巻線が内側にあり、外側への出力がない場合の単相スイッチング回路を示しています。 これを選択した場合、シャフトの回転方向を変更することはできません。

それ以外の場合、単相コンデンサ IM を反転するには、動作巻線の方向を変更する必要があります。 このためには以下が必要になります。
- 機械;
- プッシュボタン式ポスト。
- 接触者。

単相ユニットの回路は、三相非同期モーターの回路とほとんど変わりません。 以前は、A 相と B 相を切り替えていました。現在、方向を変えると、相線の代わりに中性線が動作巻線の片側に接続され、もう一方の側では相線の代わりに相線が接続されます。ゼロワイヤー。 およびその逆。