Pro zefektivnění práce všech ovladačů usnadňujících ovládání a zvýšení kontroly řízení automobilu je využívána sběrnice CAN. Takové zařízení můžete připojit k autoalarmu vlastníma rukama.
[ Skrýt ]
Co je sběrnice CAN a jak funguje
CAN bus je síť řadičů. Zařízení slouží ke spojení všech řídicích modulů vozu do jedné pracovní sítě se společným vodičem. Toto zařízení se skládá z jednoho páru kabelů nazývaných CAN. Informace přenášené kanály z jednoho modulu do druhého jsou odesílány v zakódované podobě.
Schéma připojení zařízení ke sběrnici CAN v Mercedesu
Jaké funkce může provádět sběrnice CAN:
- připojení jakýchkoli zařízení a zařízení k palubní síti automobilu;
- zjednodušení algoritmu pro připojení a fungování pomocných systémů stroje;
- jednotka může současně přijímat a vysílat digitální data z různých zdrojů;
- použití pneumatiky snižuje vliv vnějších elektromagnetických polí na fungování hlavních a pomocných systémů stroje;
- Sběrnice CAN umožňuje urychlit postup přenosu informací do určitých zařízení a součástí vozidla.
Tento systém funguje v několika režimech:
- Pozadí. Všechna zařízení jsou vypnutá, ale sběrnice je napájena. Hodnota napětí je příliš nízká, takže sběrnice nebude schopna vybít baterii.
- Režim spuštění. Když automobilový nadšenec vloží klíč do zámku a otočí jím nebo stiskne tlačítko Start, zařízení se aktivuje. Je povolena možnost stabilizace napájení dodávaného do ovladačů a senzorů.
- Aktivní režim. V tomto případě dochází k výměně dat mezi všemi regulátory a senzory. Při provozu v aktivním režimu lze parametr spotřeby zvýšit až na 85 mA.
- Režim spánku nebo vypnutí. Po vypnutí napájecí jednotky přestanou ovladače KAN fungovat. Když je režim spánku zapnutý, všechny uzly stroje jsou odpojeny od palubní sítě.
Kanál Vialon Sushka ve svém videu vyprávěl o sběrnici CAN a o tom, co potřebujete vědět o jejím provozu.
Výhody a nevýhody
Jaké jsou výhody CAN-bus:
- Snadná instalace zařízení do auta. Majitel stroje nemusí utrácet peníze za instalaci, protože tento úkol můžete provést sami.
- Výkon zařízení. Zařízení umožňuje rychlou výměnu informací mezi systémy.
- Odolnost vůči rušení.
- Všechny pneumatiky mají víceúrovňový kontrolní systém. Jeho použití umožňuje předcházet chybám při přenosu a příjmu dat.
- Během provozu sběrnice automaticky rozloží rychlost na různé kanály. To zajišťuje, že všechny systémy fungují optimálně.
- Vysoká bezpečnost zařízení, v případě potřeby systém blokuje neoprávněný přístup.
- Velký výběr zařízení různých typů od různých výrobců. Můžete si vybrat možnost určenou pro konkrétní model vozu.
Jaké jsou nevýhody zařízení:
- V zařízeních platí omezení na množství přenášených dat. Moderní auta používají spoustu elektronických zařízení. Jejich velký počet vede k velkému zahlcení kanálu přenosu informací. To způsobuje prodloužení doby odezvy.
- Většina dat zasílaných po sběrnici má specifický účel. Malá část provozu je přidělena užitečným informacím.
- Při použití protokolu vyšší úrovně může majitel automobilu čelit problému nedostatečné standardizace.
Typy a označení
Nejoblíbenějším typem pneumatik jsou zařízení navržená Robertem Boschem. Zařízení může fungovat sekvenčně, to znamená, že signál je vysílán po signálu. Taková zařízení se nazývají Serial BUS. V prodeji najdete také paralelní autobusy Parallel BUS. V nich je přenos dat prováděn několika komunikačními kanály.
O odrůdách, principu fungování a možnostech sběrnice CAN se můžete dozvědět z videa natočeného kanálem DIYorDIE.
S ohledem na různé typy identifikátorů lze rozlišit několik typů zařízení:
- CH2, 0A Aktivní Takto jsou označena zařízení, která podporují 11bitovou výměnu dat. Tyto uzly neindikují pulzní chyby 29bitového uzlu.
- CH2, 0V Aktivní Takto se označují zařízení pracující v 11bitovém formátu. Hlavní rozdíl je v tom, že když je v systému nalezen 29bitový identifikátor, odešlou chybové hlášení do řídicího modulu.
Je třeba poznamenat, že v moderních strojích se tyto typy zařízení nepoužívají. Je to dáno tím, že fungování systému musí být konzistentní a logické. A v tomto případě může pracovat s několika tepovými frekvencemi - 125 nebo 250 kbps. Nižší rychlost se používá pro ovládání pomocných zařízení jako jsou vnitřní světla, elektrické ovládání oken, stěrače atd. Vysoká rychlost je potřebná pro zajištění chodu převodovky, hnacího ústrojí, systému ABS atd.
Různé funkce sběrnice
Zvažte, jaké funkce existují pro různá zařízení.
Zařízení pro motor automobilu
Při připojení zařízení je zajištěn kanál rychlého přenosu dat, přes který jsou informace šířeny rychlostí 500 kbps. Hlavním účelem sběrnice je synchronizovat činnost řídicího modulu, například převodovky a motoru.
Komfortní zařízení
Rychlost přenosu dat na tomto kanálu je nižší a je 100 kbps. Funkcí takové sběrnice je propojit všechna zařízení patřící do této třídy.
Informační a příkazové zařízení
Rychlost přenosu dat je stejná jako v případě zařízení typu Comfort. Hlavním úkolem sběrnice je poskytovat komunikaci mezi obslužnými uzly, například mobilním zařízením a navigačním systémem.
Na fotografii jsou uvedeny pneumatiky různých výrobců.
1. Zařízení pro spalovací motor automobilu 2. Analyzátor rozhraní
Mohou být problémy se sběrnicí CAN?
V moderním autě se neustále používá digitální sběrnice. Pracuje současně s několika systémy a informace jsou neustále přenášeny jeho komunikačními kanály. V průběhu času se mohou u zařízení vyskytnout problémy. V důsledku toho nebude analyzátor dat správně fungovat. Pokud jsou zjištěny problémy, majitel vozu musí najít příčinu.
Z jakých důvodů dochází k selháním v práci:
- poškození nebo přerušení elektrických obvodů zařízení;
- došlo ke zkratu v systému k baterii nebo zemi;
- mohl by zavřít systémy CAN-High nebo CAN-Low;
- došlo k poškození pogumovaných propojek;
- vybití baterie nebo pokles napětí v palubní síti způsobené nesprávným provozem generátorového zařízení;
- zapalovací cívka selhala.
Při hledání příčin mějte na paměti, že závadou může být nesprávná činnost přídavných zařízení, která jsou instalována dodatečně. Důvodem může být například nefunkčnost systému ochrany proti krádeži, ovladačů a zařízení.
O opravě CAN sběrnice palubní desky ve voze Ford Focus 2 se můžete dozvědět z videa natočeného uživatelem Brock – Video Corporation.
Postup při odstraňování problémů je následující:
- Nejprve majitel vozu diagnostikuje stav systému. Je vhodné provést kontrolu počítače, abyste zjistili případné problémy.
- V další fázi je diagnostikována úroveň napětí a odpor elektrických obvodů.
- Pokud je vše v pořádku, zkontroluje se parametr odporu pogumovaných propojek.
Diagnostika výkonu sběrnice CAN vyžaduje určité dovednosti a zkušenosti, proto je lepší svěřit postup odstraňování problémů odborníkům.
Jak připojit alarm přes CAN sběrnici
Chcete-li připojit sběrnici CAN vlastníma rukama k autoalarmu automobilu s automatickým startem nebo bez něj, musíte vědět, kde je umístěna řídicí jednotka systému ochrany proti krádeži. Pokud byl alarm nainstalován nezávisle, proces vyhledávání nezpůsobí majiteli vozu potíže. Ovládací modul je obvykle umístěn pod palubní deskou poblíž volantu nebo za ovládacím panelem.
Jak provést postup připojení:
- Systém ochrany proti krádeži musí být nainstalován a připojen ke všem uzlům a prvkům.
- Najděte tlustý oranžový kabel, připojuje se k digitální sběrnici.
- Adaptér systému ochrany proti krádeži je připojen ke kontaktu nalezené pneumatiky.
- Zařízení je namontováno na bezpečném a pohodlném místě, zařízení je pevné. Všechny elektrické obvody je nutné izolovat, aby nedocházelo k jejich obrušování a svodům proudu. Provádí se diagnostika správnosti provedeného úkolu.
- V konečné fázi jsou všechny kanály nakonfigurovány tak, aby zajistily provozní stav systému. Musíte také nastavit funkční číslo zařízení.
Množství instalovaných senzorů na moderních modelech automobilů nám často umožňuje nazývat je „počítače na kolech“. Aby bylo možné udělat pořádek ve správě mnoha elektronických systémů, byla vytvořena sběrnice CAN. Co to je a jaké jsou principy jeho práce, budeme zvažovat v tomto článku.
Historický odkaz
První produkty automobilového průmyslu se obešly zcela bez elektrických obvodů. K nastartování motoru automobilu bylo použito speciální magnetoelektrické zařízení, které vyrábí elektřinu z kinetické energie.
Postupně se však vozy více a více zaplétaly do drátů a v roce 1970 co do míry vycpání různými senzory konkurovaly letadlům. A čím více zařízení bylo ve voze umístěno, tím zjevnější byla potřeba racionalizovat elektrické obvody.
Řešení problému bylo možné s revolucí mikroprocesorů a probíhalo v několika fázích:
- V roce 1983 začal německý koncern Bosch vyvíjet nový protokol pro přenos dat pro použití v automobilovém průmyslu;
- O tři roky později na konferenci v Detroitu byl tento protokol oficiálně představen široké veřejnosti pod názvem „Sensor Area Network“ (Controller Area Network), nebo v angličtině zkráceně CAN;
- Praktickou realizaci německého vynálezu převzaly společnosti "Intel" a "Philips". První prototypy pocházejí z roku 1987;
- V roce 1988 se BMW řady 8 stalo prvním vozem sjetým z montážní linky, na kterém byly všechny senzory uspořádány podle technologie „CAN“;
- O tři roky později Bosch aktualizoval standard a přidal nové funkce;
- V roce 1993 se norma KAN stala mezinárodní a obdržela klasifikátor ISO;
- V roce 2001 začalo být každé čtyřkolové vozidlo v Evropě povinně vybaveno sběrnicí CAN;
- V roce 2012 byla vydána nová verze sběrnice: byla zvýšena rychlost přenosu informací a byla také organizována kompatibilita s řadou nových zařízení.

CAN bus: jak to funguje
Sběrnice obsahuje pouze pár vodičů připojených k jedinému mikročipu. Každý kabel přenáší několik stovek signálů současně do různých ovladačů vozidla. Rychlost přenosu dat je srovnatelná s širokopásmovým internetem. V případě potřeby se navíc signál zesílí na požadovanou úroveň.
Technologickou práci lze rozdělit do několika fází:
- Režim na pozadí- všechny uzly systému jsou vypnuty, ale napájení je nadále dodáváno do mikročipu CAN. Úroveň spotřeby energie je extrémně malá a dosahuje nepatrných zlomků miliampérů;
- zahájení- jakmile řidič otočí klíčkem zapalování (nebo stiskne tlačítko "Start" pro nastartování motoru - u některých modelů automobilů), systém se doslova "probudí". Režim stabilizace energie dodávané do snímačů je zapnutý;
- aktivní práce- všechny ovladače si vyměňují potřebné (diagnostické i aktuální) informace. Úroveň spotřeby elektrické energie se při špičkovém zatížení zvyšuje na rekordních 85 miliampérů;
- usínání- jakmile se vypne motor vozu, senzory "KAN" okamžitě přestanou fungovat. Každý z uzlů systému je nezávisle odpojen od elektrické sítě a přejde do režimu spánku.

Co je sběrnice CAN v autě?
CAN ve vztahu k vozu lze nazvat „páteř“, ke které jsou připojena všechna elektrická zařízení. Signály jsou digitální a vodiče ke každému ovladači jsou zapojeny paralelně. Výsledkem je vysoký výkon sítě.
V moderních automobilech jsou senzory z následujících zařízení kombinovány do jedné sítě:
- Motor;
- Převodová skříň;
- Airbagy (airbagy);
- protiblokovací brzdový systém;
- Posilovač řízení;
- Zapalování;
- Přístrojová deska;
- Pneumatiky (kontroléry, které určují úroveň tlaku);
- "Stěrače" na čelním skle;
- multimediální systém;
- Navigace (GLONASS, GPS);
- Palubní počítač.

Aplikace v jiných průmyslových odvětvích
Lehkost a jednoduchost technologie CAN odhaluje možnosti jejího uplatnění nejen pro železné koně. Pneumatika se také používá v následujících oblastech:
- Výroba jízdních kol. Japonská značka Shimano ohlásila v roce 2009 jízdní kolo s víceúrovňovým řídicím systémem pro mechanismus řazení na bázi CAN. Efektivita tohoto kroku byla tak zřejmá, že se další firmy, Marants a Bayon X, rozhodly jít ve stopách Shimana. Poslední výrobce používá sběrnici pro systém přímého pohonu;
- Známý pro implementaci tzv. "chytré domácnosti" na principu CAN-bus. Mnoho zařízení, která dokážou vyřešit určité úkoly bez účasti lidí (automatické zavlažování trávníku, termostat, video monitorovací systém, ovládání osvětlení, klimatizace atd.), je spojeno do jediného systému přenosu dat. Je pravda, že použití čistě automobilové techniky v lidském obydlí odborníci považují spíše za pochybné. Mezi slabiny takového kroku patří absence jednotného mezinárodního standardu CAS pro chytré domy.

Výhody a nevýhody
"KAN-bus" je ve strojírenství ceněn pro tyto pozitivní vlastnosti:
- Rychlost: systém je přizpůsoben pro práci v podmínkách těžkého časového tlaku;
- Relativní snadnost zabudování do stroje a nízká úroveň nákladů na instalaci;
- Zvýšená tolerance k interferenci;
- Víceúrovňový řídicí systém, který vám umožní vyhnout se mnoha chybám v procesu zadávání a výstupu dat;
- Rozložení pracovních rychlostí umožňuje přizpůsobit se téměř každé situaci;
- Zvýšená úroveň zabezpečení: blokování neoprávněného přístupu zvenčí;
- Různé normy, stejně jako výrobní společnosti. Paleta pneumatik dostupných na trhu vám umožní najít volbu i pro nejlevnější auto.
Navzdory množství výhod není technologie CAN bez řady slabin:
- Množství informací, které je k dispozici pro simultánní přenos v „datovém paketu“, je pro dnešní požadavky dosti omezené;
- Významná část přenášených údajů má oficiální a technické účely. Užitečná data samotná tvoří nepatrný zlomek provozu v síti;
- Protokol nejvyšší vrstvy není vůbec standardizován.
Bosch vynalezl nejen zapalovací svíčku a palivový filtr, ale také jakýsi „internet“ pro automobilové senzory nazývaný sběrnice CAN. co to je standard v oblasti propojení všech ovladačů do jediné neuronové sítě se stal známým asi před 30 lety.

Video: jak funguje can-bus v autě
V tomto videu vám mechanik Arthur Kamalyan řekne, k čemu slouží can-bus v autě a jak se k němu připojit:
CAN Bus - Úvod
Protokol CAN je norma ISO (ISO 11898) pro sériovou komunikaci. Protokol byl vyvinut s ohledem na použití v transportních aplikacích. Dnes se CAN rozšířil a používá se v systémech automatizace průmyslové výroby a také v dopravě.
Standard CAN se skládá z fyzické vrstvy a datové vrstvy, která definuje několik různých typů zpráv, pravidla řešení konfliktů přístupu ke sběrnici a ochranu proti chybám.
protokol CAN
Protokol CAN je popsán v normě ISO 11898-1 a lze jej shrnout následovně:
Fyzická vrstva využívá rozdílový přenos dat přes kroucenou dvojlinku;
K řízení přístupu ke sběrnici se používá nedestruktivní bitové řešení konfliktů;
Zprávy jsou malé (většinou 8 bajtů dat) a jsou chráněny kontrolním součtem;
Zprávy nemají explicitní adresy, místo toho každá zpráva obsahuje číselnou hodnotu, která řídí její pořadí na sběrnici a může také sloužit jako identifikátor obsahu zprávy;
Dobře promyšlené schéma zpracování chyb, které zajišťuje opětovné odeslání zpráv, pokud nebyly správně přijaty;
jsou k dispozici účinné prostředky pro izolaci poruch a odstranění vadných uzlů ze sběrnice.
Protokoly vyšší úrovně
Samotný protokol CAN pouze definuje, jak lze malé datové pakety bezpečně přesouvat z bodu A do bodu B prostřednictvím komunikačního média. Jak byste mohli očekávat, neříká nic o tom, jak ovládat tok; přenést velké množství dat, než se vejde do 8bajtové zprávy; ani o adresách uzlů; navázání spojení atd. Tyto body jsou definovány protokolem Higher Layer Protocol (HLP). Termín HLP pochází z modelu OSI a jeho sedmi vrstev.
Protokoly vyšší úrovně se používají k:
Standardizace spouštěcí procedury včetně volby datové rychlosti;
Distribuce adres mezi interagujícími uzly nebo typy zpráv;
definice označení zpráv;
zajištění zpracování chyb na systémové úrovni.
Skupiny uživatelů atd.
Jedním z nejúčinnějších způsobů, jak zvýšit svou kompetenci CAN, je účastnit se práce v rámci stávajících skupin uživatelů. I když se neplánujete aktivně zapojit, mohou být uživatelské skupiny dobrým zdrojem informací. Účast na konferencích je dalším dobrým způsobem, jak získat komplexní a přesné informace.
Produkty CAN
Na nízké úrovni se zásadně rozlišuje mezi dvěma typy produktů CAN dostupnými na volném trhu – čipy CAN a vývojovými nástroji CAN. Na vyšší úrovni jsou dalšími dvěma typy produktů moduly CAN a inženýrské nástroje CAN. V současné době je na volném trhu k dispozici široká škála těchto produktů.
CAN patenty
Patenty související s aplikacemi CAN mohou být různého typu: implementace časování a frekvencí, přenos velkých datových souborů (protokol CAN používá datové rámce dlouhé pouze 8 bajtů) atd.
Distribuované řídicí systémy
Protokol CAN je dobrým základem pro vývoj distribuovaných řídicích systémů. Metoda řešení konfliktů používaná CAN zajišťuje, že každý uzel CAN bude interagovat se zprávami, které jsou pro tento uzel relevantní.
Distribuovaný řídicí systém lze popsat jako systém, jehož výpočetní výkon je rozdělen mezi všechny uzly systému. Opakem je systém s centrální procesorovou jednotkou a lokálními I/O body.
Zprávy CAN
Sběrnice CAN je vysílací sběrnice. To znamená, že všechny uzly mohou „naslouchat“ všem přenosům. Neexistuje způsob, jak odeslat zprávu konkrétnímu uzlu, všechny uzly bez výjimky obdrží všechny zprávy. Hardware CAN však poskytuje schopnost místního filtrování, takže každý modul může reagovat pouze na zprávu, která ho zajímá.
CAN adresování zpráv
CAN používá relativně krátké zprávy – maximální délka informačního pole je 94 bitů. Zprávy nemají explicitní adresu, lze je nazvat obsahově adresné: obsah zprávy implicitně (implicitně) určuje adresáta.
Typy zpráv
Na sběrnici CAN se přenášejí 4 typy zpráv (nebo rámců):
Datový rámec (Data Frame);
Vzdálený rám (Remote Frame);
Chybový rámec;
Přetížení rámu.
datový rámec
Krátce: "Ahoj všichni, jsou tam údaje označené X, doufám, že se ti líbí!"
Datový rámec je nejběžnějším typem zprávy. Obsahuje následující hlavní části (některé detaily jsou pro stručnost vynechány):
Arbitration Field, které určuje pořadí zprávy, když dva nebo více uzlů soutěží o sběrnici. Arbitrážní pole obsahuje:
V případě CAN 2.0A 11bitový identifikátor a jeden bit, bit RTR, který je definujícím datovým rámcem.
V případě CAN 2.0B 29bitový identifikátor (který také obsahuje dva recesivní bity: SRR a IDE) a bit RTR.
Datové pole, které obsahuje 0 až 8 bajtů dat.
Pole CRC (CRC Field), obsahující 15bitový kontrolní součet vypočítaný pro většinu částí zprávy. Tento kontrolní součet se používá pro detekci chyb.
Slot pro potvrzení. Každý řadič CAN schopný správně přijmout zprávu posílá na konci každé zprávy bit potvrzení. Transceiver zkontroluje přítomnost rozpoznávacího bitu a pokud žádný nenalezne, odešle zprávu znovu.
Poznámka 1: Přítomnost rozpoznávacího bitu na sběrnici neznamená nic jiného, než že každý plánovaný cíl přijal zprávu. Jediné, co je známo, je, že zpráva byla správně přijata jedním nebo více uzly sběrnice.
Poznámka 2: Identifikátor v poli rozhodčího řízení, navzdory svému názvu, nemusí nutně identifikovat obsah zprávy.
Datový rámec CAN 2.0B ("standardní CAN").

Datový rámec CAN 2.0B ("rozšířený CAN").
Vzdálený rám
Stručně: "Ahoj všichni, může někdo vytvořit data označená X?"
Smazaný rámec je velmi podobný datovému rámci, ale má dva důležité rozdíly:
Je výslovně označen jako vymazaný rámec (bit RTR v rozhodčím poli je recesivní) a
Chybí datové pole.
Hlavním úkolem vzdáleného rámce je požádat o přenos správného datového rámce. Jestliže, řekněme, uzel A předává vzdálený rámec s parametrem rozhodčího pole 234, pak by uzel B, pokud je správně inicializován, měl také poslat zpět datový rámec s parametrem rozhodčího pole 234.
Vzdálené rámce lze použít k implementaci řízení provozu sběrnice požadavek-odpověď. V praxi je ale vzdálený rám málo využívaný. To není tak důležité, protože norma CAN nepředepisuje přesně, jak je zde uvedeno. Většinu řadičů CAN lze naprogramovat tak, aby automaticky reagovaly na vzdálený rámec, nebo aby místo toho upozornily místní procesor.
Vzdálený rámec má jeden trik: Kód délky dat musí být nastaven na délku očekávané zprávy s odpovědí. V opačném případě nebude řešení konfliktů fungovat.
Někdy je vyžadováno, aby uzel reagující na vzdálený rámec zahájil svůj přenos, jakmile rozpozná identifikátor, a tak „vyplní“ prázdný vzdálený rámec. Tohle je jiný případ.

Chyba rámu
Krátce (společně, nahlas): "Ach, DRAHÁ, ZKUSME JEDNU JEDNU"
Error Frame je speciální zpráva, která porušuje pravidla rámování zprávy CAN. Odesílá se, když uzel detekuje selhání, a pomáhá ostatním uzlům detekovat selhání – a také pošlou chybové rámce. Vysílač se automaticky pokusí odeslat zprávu znovu. Existuje dobře promyšlené schéma čítače chyb, které zajišťuje, že uzel nemůže narušit komunikaci sběrnice opakovaným odesíláním chybových rámců.
Chybový rámec obsahuje Error Flag, který se skládá ze 6 bitů stejné hodnoty (čímž porušuje pravidlo naplnění bitů) a Error Delimiter, který se skládá z 8 recesivních bitů. Oddělovač chyb poskytuje určitý prostor, ve kterém mohou ostatní uzly sběrnice posílat své příznaky chyby poté, co samy detekují první příznak chyby.

Přetížení rámu
Krátce: "Jsem velmi zaneprázdněn 82526 malý, mohl bys chvilku počkat?"
Rám přetížení je zde zmíněn pouze pro úplnost. Má velmi podobný formát jako chybový rámec a je přenášen obsazeným uzlem. Rám přetížení se používá zřídka, protože moderní řadiče CAN jsou dostatečně výkonné na to, aby je nepoužívaly. Ve skutečnosti je jediným řadičem, který bude generovat rámce přetížení, nyní zastaralý 82526.
Standardní a rozšířené CAN
Zpočátku standard CAN nastavil délku identifikátoru v rozhodčím poli na 11 bitů. Později byl na žádost kupujících standard rozšířen. Nový formát je často označován jako rozšířený CAN (Extended CAN) a umožňuje alespoň 29 bitů v identifikátoru. Vyhrazený bit v řídicím poli se používá k rozlišení mezi dvěma typy rámců.
Formálně jsou standardy pojmenovány takto −
2,0A - pouze s 11bitovými identifikátory;
2.0B je rozšířená verze s 29bitovými nebo 11bitovými identifikátory (lze je kombinovat). Uzel 2.0B může být
2,0B aktivní schopné vysílat a přijímat rozprostřené rámce, popř
2.0B pasivní (pasivní), tzn. tiše zahodí přijaté rozšířené snímky (ale viz níže).
1.x - odkazuje na původní specifikaci a její revize.
V současné době jsou novější řadiče CAN obvykle typu 2.0B. Řadič typu 1.x nebo 2.0A bude zmatený při přijímání zpráv s 29 arbitrážními bity. Řadič pasivního typu 2.0B je přijme, rozpozná, zda jsou správné, a poté je zahodí; řadič aktivního typu 2.0B bude schopen takové zprávy vysílat i přijímat.
Ovladače 2.0B a 2.0A (stejně jako 1.x) jsou kompatibilní. Můžete je použít všechny na stejné sběrnici, pokud se řadiče 2.0B zdrží odesílání rozložených snímků.
Někdy lidé tvrdí, že standardní CAN je „lepší“ než rozšířené CAN, protože v rozšířených CAN zprávách je větší režie. Není tomu tak nutně. Pokud k přenosu dat používáte rozhodovací pole, může rozšířený rámec CAN obsahovat menší režii než standardní rámec CAN.
Základní CAN (Basic CAN) a plný CAN (Full CAN)
Pojmy Basic CAN a Full CAN pocházejí z "dětství" CAN. Kdysi dávno existoval řadič Intel 82526 CAN, který poskytoval programátorovi rozhraní ve stylu DPRAM. Pak přišel Philips s 82C200, který používal programovací model orientovaný na FIFO a omezené možnosti filtrování. Pro rozlišení mezi těmito dvěma programovacími modely lidé začali nazývat metodu Intel Full CAN a metodu Philips Basic CAN. Dnes většina regulátorů CAN podporuje oba programovací modely, takže nemá smysl používat termíny Full CAN a Basic CAN – ve skutečnosti mohou tyto termíny způsobit zmatek a je třeba se jim vyhnout.
Ve skutečnosti může řadič Full CAN komunikovat s řadičem Basic CAN a naopak. Nejsou žádné problémy s kompatibilitou.
Řešení konfliktů sběrnic a priorita zpráv
Řešení konfliktu zpráv (proces, kterým dva nebo více řadičů CAN rozhodují o tom, kdo bude sběrnici používat) je velmi důležité při určování skutečné dostupnosti šířky pásma pro přenos dat.
Jakýkoli řadič CAN může zahájit přenos, když zjistí, že sběrnice je nečinná. To může způsobit, že dva nebo více ovladačů začne vysílat zprávu (téměř) současně. Konflikt se řeší následovně. Vysílací uzly sledují sběrnici během odesílání zprávy. Pokud uzel detekuje dominantní úroveň, zatímco sám vysílá recesivní úroveň, okamžitě se stáhne z procesu řešení konfliktu a stane se příjemcem. Rozlišení kolize se provádí přes celé arbitrážní pole a po odeslání tohoto pole zůstane na sběrnici pouze jeden vysílač. Tento uzel bude pokračovat ve vysílání, pokud se nic nestane. Další potenciální vysílače se pokusí vyslat své zprávy později, až bude sběrnice volná. V procesu řešení konfliktu se neztrácí čas.
Důležitou podmínkou pro úspěšné vyřešení konfliktu je nemožnost situace, kdy by dva uzly mohly přenášet stejné arbitrážní pole. Existuje jedna výjimka z tohoto pravidla: pokud zpráva neobsahuje žádná data, může tuto zprávu vysílat kterýkoli uzel.
Vzhledem k tomu, že sběrnice CAN je drátová sběrnice AND a dominantní bit je logická 0, vyhraje řešení konfliktu zpráva s číselně nejnižším rozhodovacím polem.
Otázka: Co se stane, když se jeden uzel sběrnice pokusí odeslat zprávu?
Odpověď: Uzel v řešení konfliktu samozřejmě vyhraje a zprávu úspěšně přenese. Ale když přijde čas rozpoznání... žádný uzel nepošle dominantní bit oblasti rozpoznávání, takže vysílač detekuje chybu rozpoznávání, vyšle příznak chyby, zvýší počítadlo chyb přenosu o 8 a začne znovu vysílat. Tento cyklus se bude opakovat 16krát, poté vysílač přejde do pasivního chybového stavu. Podle zvláštního pravidla v algoritmu omezování chyb se hodnota čítače chyb přenosu již nebude zvyšovat, pokud má uzel pasivní chybový stav a chyba je chybou rozpoznání. Proto bude uzel vysílat navždy, dokud někdo zprávu nepozná.
Adresování a identifikace zpráv
Opět není nic špatného na tom, že zprávy CAN neobsahují přesné adresy. Každý řadič CAN přijme veškerý provoz sběrnice a pomocí kombinace hardwarových filtrů a softwaru určí, zda má o tuto zprávu „zájem“ či nikoli.
Protokol CAN ve skutečnosti postrádá koncept adresy zprávy. Místo toho je obsah zprávy definován identifikátorem, který se nachází někde ve zprávě. Zprávy CAN lze nazvat "content-addressed".
Konkrétní adresa funguje takto: "Toto je zpráva pro uzel X." Zpráva s adresou obsahu může být popsána jako: "Tato zpráva obsahuje data označená X." Rozdíl mezi těmito dvěma pojmy je malý, ale významný.
Obsah arbitrážního pole slouží podle normy k určení pořadí zprávy na sběrnici. Všechny řadiče CAN budou také používat celé (některé pouze část) pole rozhodčího řízení jako klíč v procesu filtrování hardwaru.
Norma neříká, že pole rozhodčího řízení musí být nutně použito jako identifikátor zprávy. Toto je však velmi častý případ použití.
Poznámka k hodnotám identifikátorů
Řekli jsme, že pro identifikátor je k dispozici 11 (CAN 2.0A) nebo 29 (CAN 2.0B) bitů. Není to tak úplně pravda. Kvůli kompatibilitě s určitým starým řadičem CAN (hádejte kterým?) by identifikátory neměly mít 7 nejvýznamnějších bitů nastavených na logickou jedničku, takže pro 11bitové identifikátory a uživatele 29- bitové identifikátory mohou používat 532676608 různých hodnot.
Všimněte si, že všechny ostatní řadiče CAN akceptují „nesprávné“ identifikátory, takže identifikátory 2032..2047 lze v moderních systémech CAN používat bez omezení.
CAN fyzické vrstvy
sběrnice CAN
Sběrnice CAN používá kód bez návratu na nulu (NRZ) s vyplněním bitů. Existují dva různé stavy signálu: dominantní (logická 0) a recesivní (logická 1). Odpovídají určitým elektrickým úrovním v závislosti na použité fyzické vrstvě (je jich několik). Moduly jsou zapojeny A do sběrnice: pokud alespoň jeden uzel uvede sběrnici do dominantního stavu, pak je v tomto stavu celá sběrnice bez ohledu na to, kolik uzlů přenáší recesivní stav.
Různé fyzické úrovně
Fyzická vrstva definuje elektrické úrovně a schéma signalizace sběrnice, impedanci kabelu atd.
Existuje několik různých verzí fyzických vrstev: Nejběžnější je ta, kterou definuje standard CAN, součást ISO 11898-2, což je dvouvodičový symetrický signálový obvod. Někdy se mu také říká vysokorychlostní CAN.
Jiná část téže normy ISO 11898-3 popisuje další dvouvodičové schéma vyváženého signálu pro pomalejší sběrnici. Je odolný vůči poruchám, takže signalizace může pokračovat, i když je jeden z vodičů přerušen, zkratován k zemi nebo je ve stavu Vbat. Někdy se toto schéma nazývá nízkorychlostní CAN.
SAE J2411 popisuje jednovodičovou (samozřejmě plus zemní) fyzickou vrstvu. Používá se především v automobilech - například GM-LAN.
Existuje několik proprietárních fyzických vrstev.
Za starých časů, kdy CAN ovladače neexistovaly, se používaly modifikace RS485.
Různé fyzické úrovně se zpravidla nemohou vzájemně ovlivňovat. Některé kombinace mohou fungovat (nebo se zdá, že fungují) za dobrých podmínek. Například vysokorychlostní a nízkorychlostní transceivery mohou pouze příležitostně pracovat na stejné sběrnici.
Drtivá většina čipů transceiveru CAN vyrábí společnost Philips; mezi další výrobce patří Bosch, Infineon, Siliconix a Unitrode.
Nejběžnějším transceiverem je 82C250, který implementuje fyzickou vrstvu popsanou normou ISO 11898. Vylepšenou verzí je 82C251.
Běžným nízkorychlostním CAN transceiverem je Philips TJA1054.
Maximální přenosová rychlost sběrnice
Maximální rychlost přenosu dat na sběrnici CAN, podle standardu, se rovná 1 Mbps. Některé řadiče CAN však podporují rychlosti nad 1 Mbps a lze je použít ve specializovaných aplikacích.
Nízkorychlostní CAN (ISO 11898-3, viz výše) pracuje rychlostí až 125 kbps.
Jednodrátová sběrnice CAN ve standardním režimu může přenášet data rychlostí asi 50 kbps a ve speciálním vysokorychlostním režimu, například pro programování ECU (ECU), asi 100 kbps.
Minimální rychlost přenosu dat na sběrnici
Uvědomte si, že některé transceivery vám neumožňují vybrat rychlost pod určitou hodnotu. Například pokud používáte 82C250 nebo 82C251, můžete bez problémů nastavit rychlost na 10 kbps, ale pokud používáte TJA1050, nebudete moci nastavit rychlost pod 50 kbps. Podívejte se na specifikaci.
Maximální délka kabelu
Při datové rychlosti 1 Mbps může být maximální délka použitého kabelu cca 40 metrů. To je způsobeno požadavkem schématu řešení konfliktů, podle kterého musí být vlnoplocha signálu schopna dosáhnout nejvzdálenějšího uzlu a vrátit se zpět před přečtením bitu. Jinými slovy, délka kabelu je omezena rychlostí světla. Návrhy na zvýšení rychlosti světla byly zvažovány, ale byly zamítnuty kvůli intergalaktickým problémům.
Další maximální délky kabelů (hodnoty jsou přibližné):
100 metrů při 500 kbps;
200 metrů při 250 kbps;
500 metrů při 125 kbps;
6 kilometrů při 10 kbps.
Při použití optočlenů pro galvanické oddělení se maximální délka sběrnice odpovídajícím způsobem zkrátí. Tip: použijte rychlé optočleny a podívejte se na zpoždění signálu v zařízení, nikoli na maximální přenosovou rychlost v datovém listu.
Ukončení autobusu
Sběrnice ISO 11898 CAN musí být zakončena terminátorem. Toho je dosaženo instalací 120 ohmového odporu na každý konec sběrnice. Ukončení má dva účely:
1. Odstraňte odrazy signálu na konci sběrnice.
2. Ověřte, že přijímá správné úrovně DC.
Sběrnice ISO 11898 CAN musí být ukončena bez ohledu na její rychlost. Opakuji: sběrnice ISO 11898 CAN musí být ukončena bez ohledu na její rychlost. Pro laboratorní práci může stačit jeden terminátor. Pokud vaše CAN sběrnice funguje i při absenci terminátorů, máte prostě štěstí.
Všimněte si toho jiné fyzické úrovně, jako je nízkorychlostní CAN, jednovodičový CAN a další, mohou nebo nemusí vyžadovat zakončení sběrnice. Ale vaše vysokorychlostní CAN sběrnice ISO 11898 bude vždy vyžadovat alespoň jeden terminátor.
Kabel
Norma ISO 11898 specifikuje, že charakteristická impedance kabelu by měla být nominálně 120 ohmů, ale je povolen rozsah impedance ohmů.
Jen málo kabelů na dnešním trhu tyto požadavky splňuje. Existuje velká možnost, že rozsah hodnot odporu bude v budoucnu rozšířen.
ISO 11898 popisuje kroucenou dvojlinku, stíněnou nebo nestíněnou. Probíhají práce na standardu jednožilového kabelu SAE J2411.
Správce
18702
Abychom porozuměli principům sběrnice CAN, rozhodli jsme se na toto téma sepsat / přeložit jako obvykle řadu článků na základě materiálů ze zahraničních zdrojů.
Jedním z těchto zdrojů, který, jak se nám zdálo, zcela vhodně ilustruje principy sběrnice CAN, byla videoprezentace školícího produktu CANBASIC od Igendi Engineering (http://canbasic.com) .
Vítejte na prezentaci nového produktu CANBASIC, školícího systému (desky) věnovaného fungování sběrnice CAN (CAN).
Začneme základy budování sítě sběrnic CAN. Diagram ukazuje vůz s jeho osvětlovacím systémem.

Je znázorněno konvenční zapojení, přičemž každá kontrolka je přímo připojena k nějakému druhu spínače nebo kontaktu brzdového pedálu.

Nyní je podobná funkce ukázána pomocí technologie sběrnice CAN. Přední a zadní světla jsou připojena k řídicím modulům. Řídicí moduly jsou zapojeny paralelně se stejnými vodiči sběrnice.

Tento malý příklad ukazuje, že objem elektrického vedení je snížen. Kromě toho mohou řídicí moduly detekovat vypálené žárovky a informovat o tom řidiče.
Vůz v zadaném pohledu obsahuje čtyři řídicí moduly a jasně odráží konstrukci tréninkového systému (desky) CANBASIC

Ve výše uvedeném jsou čtyři uzly sběrnice (uzly CAN).
Přední modul ovládá přední světla.
Alarmová jednotka zajišťuje ovládání interiéru vozidla.
Hlavní řídicí modul propojuje všechny systémy vozidla pro diagnostické účely.
Zadní uzel ovládá zadní světla.
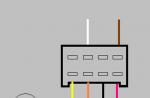
Na tréninkové desce CANBASIC vidíte směrování (umístění) tří signálů: „Power“, „CAN-Hi“ a „ground“, připojených v řídicím modulu.

U většiny vozidel potřebujete převodník OBD-USB pro připojení hlavního řídicího modulu k PC pomocí diagnostického softwaru.

Deska CANBASIC již obsahuje OBD-USB převodník a lze ji přímo připojit k PC.
Deska je napájena přes USB rozhraní, takže nejsou potřeba žádné další kabely.

Sběrnicové vodiče se používají k přenosu velkého množství dat. Jak to funguje?
Jak funguje sběrnice CAN
Tato data jsou přenášena postupně. Zde je příklad.
Osoba s lampou, vysílač, chce poslat nějakou informaci osobě s dalekohledem, příjemci (přijímači). Chce poslat data.

Aby toho dosáhli, dohodli se, že příjemce sleduje stav lampy každých 10 sekund.

Vypadá to takto:



Po 80 sekundách:

Nyní bylo přeneseno 8 bitů dat rychlostí 0,1 bitu za sekundu (tj. 1 bit za 10 sekund). Tomu se říká sériová komunikace.

Pro použití tohoto přístupu v automobilové aplikaci je časový interval zkrácen z 10 sekund na 0,000006 sekund. Pro přenos informací změnou úrovně napětí na datové sběrnici.

K měření elektrických signálů sběrnice CAN se používá osciloskop. Dva testovací plošky na desce CANBASIC umožňují tento signál měřit.

Pro zobrazení celé zprávy CAN je rozlišení osciloskopu sníženo.

Výsledkem je, že jednotlivé bity CAN již nelze rozpoznat. Pro vyřešení tohoto problému je modul CANBASIC vybaven digitálním paměťovým osciloskopem.
Modul CANBASIC vložíme do volné USB zásuvky, po které bude automaticky detekován. Software CANBASIC lze spustit právě teď.

Můžete vidět pohled na softwarový osciloskop s připojenými bitovými hodnotami. Červená zobrazuje data předaná v předchozím příkladu.
Pro vysvětlení dalších částí CAN zprávy obarvíme CAN rámec a připojíme k němu popisné popisky.

Každá barevná část zprávy CAN odpovídá vstupnímu poli stejné barvy. Oblast označená červeně obsahuje informace o uživatelských datech, které lze zadat v bitech, nibblech nebo hexadecimálním formátu.
Žlutá oblast určuje množství uživatelských dat. V zelené zóně lze nastavit jedinečný identifikátor.
Modrá oblast umožňuje nastavit zprávu CAN pro vzdálený požadavek. To znamená, že bude očekávána odpověď z jiného uzlu CAN. (Sami vývojáři systému doporučují nepoužívat vzdálené požadavky z mnoha důvodů vedoucích k závadám systému, ale to bude na jiný článek.)
Mnoho systémů sběrnice CAN je chráněno před rušením druhým datovým kanálem CAN-LO, který je invertován vzhledem k signálu CAN-HI (tj. vysílá se stejný signál, pouze s opačným znaménkem).

Šest po sobě jdoucích bitů se stejnou úrovní definuje konec rámce CAN.

Shodou okolností mohou jiné části rámce CAN obsahovat více než pět po sobě jdoucích bitů se stejnou úrovní.

Aby se zabránilo této bitové značce, objeví-li se pět po sobě jdoucích bitů se stejnou úrovní, je na konec rámce CAN vložen opačný bit. Tyto bity se nazývají osazenské bity (garbage bits). Přijímače CAN (přijímače signálu) tyto bity ignorují.

Pomocí vstupních polí lze zadat všechna data rámce CAN, a proto lze odeslat každou zprávu CAN.
Vložená data jsou okamžitě aktualizována v rámci CAN, v tomto příkladu se délka dat změní z jednoho bajtu na 8 bajtů a posune se o jeden bajt zpět.

Popisný text udává, že ukazatel směru bude řízen identifikátorem "2C1" a datovými bity 0 a 1. Všechny datové bity jsou resetovány na 0.

Identifikátor je nastaven na ""2C1". Pro aktivaci ukazatele směru musí být datový bit nastaven od 0 do 1.

V režimu salonu můžete ovládat celý modul jednoduchými kliknutími myši. Data CAN se nastavují automaticky podle požadované akce.
Směrová světla lze nastavit na potkávací světla, aby fungovala jako DRL. Jas bude řízen pulzně šířkovou modulací (PWM), v souladu s možnostmi moderní diodové technologie.
Nyní můžeme aktivovat potkávací světla, mlhová světla, brzdová světla a dálková světla.

Při vypnutí potkávacích světel se vypnou i mlhová světla. Logika ovládání světelného systému CANBASIC odpovídá vozům Volkswagen. Součástí jsou také funkce zapalování a „come home“.
Pomocí signálního uzlu můžete číst signál senzoru po inicializaci vzdáleného požadavku.
V režimu vzdáleného požadavku bude druhý rámec CAN přijat a zobrazen pod odeslaným rámcem CAN.

Datový byte CAN nyní obsahuje výsledek měření senzoru. Přiblížením k senzoru prstu můžete změnit naměřenou hodnotu.

Tlačítko pauzy zmrazí aktuální rámec CAN a umožňuje přesnou analýzu.
Jak již bylo ukázáno, různé části rámu CAN lze skrýt.

Kromě toho je podporováno skrytí každého bitu v rámci CAN.
To je velmi užitečné, pokud chcete použít reprezentaci rámce CAN ve vašich vlastních dokumentech, jako je list cvičení.
V tomto článku nebudeme plně popisovat protokol CAN, ale budeme věnovat pozornost pouze věcem, které musíte znát a pochopit, abyste mohli používat nebo vyvíjet elektronická zařízení s podporou CAN.
Protokol CAN byl vyvinut pro automobilový průmysl a následně se stal standardem v oblasti palubních sítí pro automobily, železniční dopravu atd. CAN vám umožňuje vytvářet sítě s pokročilými nástroji pro kontrolu chyb, přenosové rychlosti až 1 Mbps a pakety obsahující maximálně osm bajtů dat.
Link a fyzické vrstvyUMĚT
V protokolu CAN neexistuje striktní definice fyzické vrstvy, takže k přenosu zpráv lze použít například kroucenou dvojlinku nebo optické vlákno. CAN v podstatě implementuje linkovou vrstvu, tzn. provádí tvorbu paketů zpráv, omezuje šíření chyb, potvrzování a rozhodování. Samozřejmě existují i běžné standardy na aplikační úrovni, jako je CANopen, ale pokud není potřeba zajistit interakci mezi zařízeními různých výrobců, pak je lepší použít interní protokol.
Hostitelská strukturaUMĚT
Uzel sítě CAN, který uvažujeme, se skládá z mikrokontroléru, řadiče CAN a transceiveru (obrázek 1). Nejčastěji pro zjednodušení obvodu používáme mikrokontroléry s vestavěným CAN řadičem, ale někdy se používá i samostatný CAN řadič s rozhraním SPI (MCP2510). Dále se transceiver připojí na kroucenou dvojlinku, na jejíchž koncích jsou zakončovací odpory (terminátor) s odporem 120 ohmů.
Obrázek 1 - Uzel sítě CAN
Pro vytvoření logické jedničky v kroucené dvoulinkě nebo volné sběrnici se na oba vodiče přivede napětí rovné polovině rozdílu napětí mezi 0 nebo Vcc. Logická nula odpovídá přívodu rozdílového napětí do vodičů vedení (obrázek 2).

Obrázek 2 - Logické úrovně na sběrnici CAN
Sběrnice CAN umožňuje přenášet data rychlostí 1 Mbit/s s délkou kabelu ne větší než 40 m. V cvičné literatuře se píše, že snížením přenosové rychlosti na 10 kbit/s lze dosáhnout délka sítě 1,5 km.
balíček zprávUMĚT
Formát zprávy CAN je znázorněn na obrázku 3.

Obrázek 3 - Paket zpráv CAN
Ve skutečnosti je paket zpráv tvořen řadičem CAN a aplikační software pouze nastavuje identifikátor zprávy, délku zprávy a poskytuje datové bajty, takže nebudeme plně uvažovat paket, ale podíváme se na data, která při práci měníme. sběrnici CAN.
ID zprávy se používá k identifikaci dat odeslaných v tomto paketu. Každá odeslaná zpráva je přijata všemi uzly sítě a v tomto případě identifikátor umožňuje konkrétnímu zařízení pochopit, zda je nutné tuto zprávu zpracovat. Maximální délka zprávy je 8 bajtů, ale tuto hodnotu můžete snížit, abyste ušetřili šířku pásma na sběrnici CAN. Například níže v textu je několik screenshotů zpráv CAN z automobilové sítě.
Arbitráž v autobuseUMĚT
Bez podrobností je zpráva s nejmenším identifikátorem vždy přenášena jako první na sběrnici CAN.
Nastavení přenosové rychlosti sběrniceUMĚT
Rychlost přenosu dat na sběrnici CAN se upravuje vytvářením časových úseků, a nikoli, jako v mnoha jiných protokolech sériového přenosu dat, děličem rychlosti. Ve většině případů se používají rychlosti 10Kbps, 20Kbps, 50Kbps, 100Kbps, 125Kbps, 500Kbps, 800Kbps, 1MBaud a nastavení těchto rychlostí je již spočítáno. Obrázek 4 ukazuje okno výběru rychlosti v PcanView.

Obrázek 4 - Výběr přenosové rychlosti v programu PcanView
Jak vidíme, při nastavování standardní rychlosti se nastavení nastaví automaticky, ale jsou chvíle, kdy je potřeba použít jinou rychlost přenosu dat. Například palubní CAN vozidla může pracovat rychlostí 83 Kbps. V takovém případě si budete muset nastavení spočítat sami nebo vyhledat specializovanou kalkulačku rychlosti na internetu. Pro nezávislý výpočet rychlosti je nutné pochopit, že k přenosu jednoho bitu zprávy se používá několik kvant a přenosový interval se skládá ze tří segmentů (obrázek 5).

Obrázek 5 - Doba přenosu jednoho bitu
První segment je vždy pevný a rovná se jednomu kvantu. Dále jsou zde dva segmenty Tseg1 a Tseg2 a počet kvant v každém segmentu je uživatelsky definovaný a může být od 8 do 25. Bod vzorkování je mezi Tseg1 a Tseg2, tzn. na konci prvního a na začátku druhého segmentu. Uživatel může také definovat šířku synchronizačního skoku (Synchronization Jump Width - SJW) pro úpravu bitové rychlosti přijímacího zařízení, která může být v rozsahu 1 - 4 časových úseků.
Nyní uvedeme vzorec pro výpočet rychlosti (Příklad výpočtu rychlosti pro CAN regulátor SJA1000):
BTR = Pclk/(BRP * (1 + Tseg1 + Tseg2))
BTR - rychlost přenosu dat,
Pclk – frekvence provozu CAN regulátoru,
BRP - hodnota předděličky frekvence generátoru přenosové rychlosti
Tseg1 - první segment
Tseg2 - Druhý segment
Pro kontrolu si vezměme již vypočítanou rychlost 125Kbps a zkusme nastavení získat ručně. Pclk trvá 16 MHz.
BRP = 16 MHz /(125 kB * (1 + Tseg1 + Tseg2))
Poté zvolíme bitový přenosový interval, který je v rozsahu od 8 do 25 časových řezů, aby byla získána celočíselná hodnota BRP. V našem případě, pokud vezmeme (1 + Tseg1 + Tseg2) = 16, pak se BRP bude rovnat 30.
SP = ((1 + Tseg1 + Tseg2) * 70)/100
Dosadíme hodnoty a dostaneme 16 * 0,7 = 11,2, což odpovídá vztahu Tseg1 = 10, Tseg2 = 5, tzn. 1 + 10 + 5 = 16. Pak se podíváme, jestli Tseg2 >= 5, pak SJW = 4, pokud Tseg2< 5, то SJW = (Tseg2 – 1). В нашем случае SJW = 4.
Celkově, abyste získali rychlost 125 Kbps, musíte zadat v parametrech BRP = 30, Tseg1 = 10, Tseg2 = 5, SJW = 4.
P.S. Konfigurace přenosové rychlosti se výrazně liší mezi starými moduly USB-CAN (GW-001 a GW-002) s řadičem SJA1000 a novými moduly sysWORXX s řadičem AT91SAM7A3. V článku popisujícím práci s palubním CAN vozu při rychlosti 83kbit/s je uveden výpočet rychlosti pro ovladač AT91SAM7A3.
Příklad příjmu a přenosu dat přesRozhraní CAN
V příkladu použijeme CAN adaptér s programem PcanView od SYSTECu a připojíme se k CAN interiéru vozu pracujícím rychlostí 125Kbps. Námi zvažovaný vůz je vybaven elektrickými sedadly, a proto prozkoumáme údaje zodpovědné za polohu sedadel a pokusíme se změnit polohu opěradla výměnou balíčku pomocí počítače.
Pro začátek najdeme na schématu vozu nejvýhodněji umístěný konektor s linkami CANH a CANL a připojíme k němu náš adaptér. Pokud nelze konektor a vodiče najít, můžete se plazit k řídicí jednotce sedadla, najít dva vodiče zkroucené k sobě a opatrně vodiče přestřihnout, abyste připojili adaptér. Pokud po připojení a konfiguraci nepřijdou zprávy adaptéru, zkuste nejprve mezi sebou vyměnit CANH CANL a zkontrolovat, zda je zapnuté zapalování.
Dále spusťte program PcanView, v okně nastavení, které se otevře, nastavte přenosovou rychlost = 125 kbps a klikněte na OK (obrázek 4). V dalším okně nastavte Filtr zpráv = Standardní, rozsah adres od 000 do 7FF a klikněte na OK (obrázek 6).

Obrázek 6 - Nastavení CAN filtru
Pokud je vše provedeno správně, pak uvidíme zprávy od židlí (obrázek 7) a když stisknete tlačítko naklonění opěradla na ovládacím panelu, uvidíme další zprávu s adresou 1F4 přicházející z dálkového ovládání na židli ( Postavení 8).
Obrázek 7 - Zprávy CAN z elektrického křesla

Obrázek 8 - Zprávy CAN z elektrického křesla a zpráva z ovládacího panelu do křesla
Nyní víme, jaká by měla být adresa, délka a data v paketu CAN, aby se simulovalo stisknutí tlačítka pro změnu zadní polohy. V záložce Přenést klikněte na NOVÝ a v okně, které se otevře, vytvořte kopii balíčku 1F4, tzn. ID = 1F4, Délka = 3, Data = 40 80 00. Periodu lze ponechat na 0 ms, poté budou zprávy odeslány po stisknutí mezerníku (obrázek 9).
Obrázek 9 - Vytvoření zprávy CAN
Obrázek 10 ukazuje pole Přenos hlavního okna obsahující všechny zprávy odeslané do CAN a informace o nich. Po zvýraznění zprávy a stisknutí mezerníku bude paket odeslán do sítě CAN a křeslo se mírně posune požadovaným směrem.
Je jasné, že v tomto případě nebude možné dosáhnout plnohodnotného ovládání židle, protože. nemůžeme ze sítě vyloučit tovární balíčky dálkového ovládání, ale tento problém je celkem řešitelný.
Výsledek
Viděli jsme, jak s trochou úsilí a dovedností můžete vytvořit své vlastní elektronické systémy pomocí high-tech protokolu CAN a jak můžete připojit, prozkoumat a ovládat zařízení připojená ke sběrnici CAN automobilu.