Довгий час у промисловості використовувалися нерегульовані електроприводи на базі АТ, проте, останнім часом виникла потреба врегулюванні швидкості асинхронних двигунів.
Частота обертання ротора дорівнює
![]()
При цьому, синхронна частота обертання залежить від частоти напруги та кількості пар полюсів.
Виходячи з цього, можна зробити висновок, що регулювати швидкість АТ можна за допомогою зміни ковзання, частоти та числа пар полюсів.
Розглянемо основні методи регулювання.
Регулювання швидкості за допомогою зміни активного опору ланцюга ротора
Цей спосіб регулювання швидкості застосуємо вдвигунах з фазним ротором. При цьому ланцюг обмотки ротора включається реостат, яким можна плавно збільшувати опір. Зі збільшенням опору, ковзання двигуна зростає, а швидкість падає. Таким чином забезпечується регулювання швидкості вниз від природної характеристики.
Недоліком даного способу є його неекономічність, так як при збільшенні ковзання, втрати в ланцюзі ротора зростають, отже, ККД двигуна падає. Плюс до цього, механічна характеристика двигуна стає пологішою і м'якшою, через що невелика зміна моменту навантаження на валу, викликає велику зміну частоти обертання.

Регулювання швидкості даним способом неефективне, але, незважаючи на це, застосовується в двигунах з фазним ротором.
Регулювання швидкості двигуна за допомогою зміни напруги живлення

Даний спосіб регулювання можна здійснити, якщо включити в ланцюг автотрансформатор, перед статором, після проводів живлення. При цьому, якщо знижувати напругу на виході автотрансформатора, двигун працюватиме на зниженій напрузі. Це призведе до зниження частоти обертання двигуна, при постійному моменті навантаження, а також зниження перевантажувальної здатності двигуна. Це пов'язано з тим, що при зменшенні напруги живлення максимальний момент двигуна зменшується у квадрат разів. Крім того, цей момент зменшується швидше, ніж струм у ланцюзі ротора, а значить, ростуть і втрати, з наступним нагріванням двигуна.
Спосіб регулювання зміною напруги, можливий тільки вниз від природної характеристики, так як збільшувати напругу вище номінальної не можна, тому що це може призвести до великих втрат у двигуні, перегріву та виходу його з ладу.
Крім автотрансформатора можна використовувати тиристорний регулятор напруги.
Регулювання швидкості за допомогою зміни частоти живлення

При цьому способі регулювання до двигуна підключається перетворювач частоти (ПЧ). Найчастіше це тиристорний перетворювач частоти. Регулювання швидкості здійснюється зміною частоти напруги f, оскільки вона у разі впливає на синхронну швидкість обертання двигуна.
При зниженні частоти напруги, перевантажувальна здатність двигуна падатиме, щоб цього не допустити, потрібно підвищити величину напруги U 1 . Значення яке потрібно підвищити, залежить від цього який привід. Якщо регулювання здійснюється з постійним моментом навантаження на валу, то напругу потрібно змінювати пропорційно до зміни частоти (при зниженні швидкості). При збільшенні швидкості цього робити не слід, напруга повинна залишатися на номінальному значенні, інакше це може завдати шкоди двигуну.
Якщо регулювання швидкості проводиться з постійною потужністю двигуна (наприклад, металорізальних верстатах), то зміна напруги U 1 необхідно проводити пропорційно квадратному кореню зміни частоти f 1 .
При регулюванні установок з вентиляторною характеристикою необхідно змінювати напругу U 1 , що підводиться , пропорційно квадрату зміни частоти f 1 .
Регулювання за допомогою зміни частоти є найбільш прийнятним варіантом для асинхронних двигунів, так як при ньому забезпечується регулювання швидкості в широкому діапазоні, без значних втрат і зниження перевантажувальних здібностей двигуна.
Регулювання швидкості АТ зміною числа пар полюсів
Такий спосіб регулювання можливий тільки в багатошвидкісних асинхронних двигунах з короткозамкненим ротором, так як кількість полюсів цього ротора завжди дорівнює кількості полюсів статора.
Відповідно до формули, яка розглядалася вище, швидкість двигуна можна регулювати зміною числа пар полюсів. Причому, зміна швидкості відбувається ступінчасто, оскільки кількість полюсів набувають лише певних значень – 1,2,3,4,5.
Зміна кількості полюсів досягається перемиканням котушкових груп статорної обмотки. При цьому котушки з'єднуються різними схемами з'єднання, наприклад, "зірка - зірка" або "зірка - подвійна зірка". Перша схема з'єднання дає зміну кількості полюсів у співвідношенні 2:1. При цьому забезпечується постійна потужність двигуна під час перемикання. Друга схема змінює кількість полюсів у такому ж співвідношенні, але забезпечує постійний момент двигуна.
Застосування цього способу регулювання виправдане збереженням ККД та коефіцієнта потужності при перемиканні. Мінусом же є складніша і збільшена конструкція двигуна, а також збільшення його вартості.
Електродвигуна необхідний для плавного розгону та гальмування. Широке застосування отримали такі пристрої у промисловості. З їхньою допомогою змінюють швидкість руху обертання вентиляторів. Двигуни на 12 Вольт використовуються в системах керування та автомобілях. Усі бачили перемикачі, якими змінюється швидкість обертання вентилятора пічки у машинах. Це один із типів регуляторів. Тільки він призначений для плавного запуску. Зміна швидкості обертання відбувається східчасто.
Застосування частотних перетворювачів
Як регулятори оборотів і 380В використовуються частотні перетворювачі. Це високотехнологічні електронні пристрої, які дозволяють кардинально змінити характеристики струму (форму сигналу та частоту). В їх основі знаходяться потужні напівпровідникові транзистори та широтно-імпульсний модулятор. Вся робота приладу керується блоком мікроконтролера. Зміна швидкості обертання двигуна ротора відбувається плавно.
Тому використовуються у навантажених механізмах. Чим повільніше розгін, тим менші навантаження відчуватиме конвеєр чи редуктор. Всі частотники оснащені декількома ступенями захисту - за струмом, навантаженням, напругою та іншими. Деякі моделі частотних перетворювачів живляться від однофазного роблять із нього трифазне. Це дозволяє підключати асинхронні двигуни будинку без використання складних схем. І не втратиться потужність під час роботи з таким пристроєм.
Для яких цілей використовуються регулятори
У випадку з асинхронними двигунами регулятори обертів необхідні для:
- Суттєвої економії електроенергії. Адже не в кожному механізмі потрібна більша швидкість обертання двигуна - часом її можна зменшити на 20-30%, а це дозволить скоротити витрати на електроенергію вдвічі.
- Захист механізмів та електронних ланцюгів. За допомогою перетворювачів частоти можна здійснювати контроль температури, тиску та багатьох інших параметрів. Якщо двигун працює як привод насоса, то в ємності, в яку він накачує повітря або рідину, потрібно встановити датчик тиску. І при досягненні максимального значення двигун просто відключиться.
- Здійснення плавного пуску. Немає необхідності використовувати додаткові електронні пристрої – все можна зробити за допомогою змін налаштувань частотного перетворювача.
- Зниження витрат на технічне обслуговування. За допомогою подібних регуляторів оборотів електродвигунів 220В знижується ризик виходу з ладу приводу та окремих механізмів.

Схема, за якою побудовані частотні перетворювачі, поширена у багатьох побутових приладах. Щось подібне можна зустріти у джерелах безперебійного живлення, зварювальних апаратах, стабілізаторах напруги, блоках живлення комп'ютерів, ноутбуків, зарядниках телефонів, блоках розпалювання ламп підсвічування сучасних РК-телевізорів та моніторів.
Як працюють регулятори обертання
Можна зробити своїми руками регулятор обертів електродвигуна, але для цього потрібно вивчити всі технічні моменти. Конструктивно можна виділити кілька основних компонентів, а саме:
- Електродвигун.
- Мікроконтролерну систему управління та блок перетворювача.
- Привід та механізми, пов'язані з ним.
На початку роботи, після подачі напруги на обмотки, відбувається обертання ротора двигуна з максимальною потужністю. Саме ця особливість відрізняє асинхронні машини з інших. До цього додається навантаження від механізму, який рухається. У результаті початковому етапі потужність і споживаний струм зростають до максимуму.

Виділяється дуже багато тепла. Перегріваються і обмотки, і дроти. Застосування частотного перетворювача допоможе позбутися цього. Якщо встановити плавний пуск, то до максимальної швидкості (яка також регулюється пристроєм і може бути не 1500 об/хв, а всього 1000) двигун буде розганятися не відразу, а протягом 10 секунд (кожну секунду по 100-150 оборотів додавати). При цьому навантаження на всі механізми та дроти зменшиться в рази.
Саморобний регулятор
Самостійно можна зробити регулятор обертів електродвигуна 12В. Для цього буде потрібно перемикач на кілька положень та дротяні резистори. За допомогою останніх змінюється напруга живлення (а разом із ним і частота обертання). Аналогічні системи можна використовувати і для асинхронних двигунів, але менш ефективні. Багато років тому широко застосовувалися механічні регулятори - на основі шестерних приводів або варіаторів. Але вони були дуже надійними. Електронні засоби набагато краще за себе показують. Адже вони не такі громіздкі та дозволяють більш тонко налаштовувати привід.

Для виготовлення регулятора обертання електродвигуна потрібно кілька електронних пристроїв, які можна придбати в магазині, або зняти зі старих інверторних приладів. Непогані результати показує симістор ВТ138-600 у схемах таких електронних пристроїв. Щоб зробити регулювання, потрібно включити до схеми змінний резистор. З його допомогою змінюється амплітуда сигналу, що входить на симистор.
Впровадження системи управління

Щоб поліпшити параметри навіть найпростішого пристрою, потрібно в схему регулятора обертів електродвигуна увімкнути мікроконтролерне керування. Для цього потрібно вибрати процесор з відповідним числом входів та виходів – для підключення датчиків, кнопок, електронних ключів. Для експериментів можна застосувати мікроконтролер AtMega128 - найпопулярніший і найпростіший у використанні. У вільному доступі можна знайти множину схем з використанням цього контролера. Самостійно їх знайти і застосувати практично не складе труднощів. Щоб він правильно працював, потрібно в нього записати алгоритм – відгуки на певні дії. Наприклад, при досягненні температури 60 градусів (вимірювання відбувається на радіаторі приладу) має відключитися живлення.
На закінчення
Якщо вирішите не робити самостійно пристрій, а придбати готовий, зверніть увагу на основні параметри, такі як потужність, тип системи управління, робоча напруга, частоти. Бажано розрахувати характеристики механізму, в якому планується використовувати регулятор напруги електродвигуна. І не забудьте порівняти з параметрами частотного перетворювача.
Капітальний ремонт токарного верстата у процесі. Головний двигун - двошвидкісний
У ті часи, коли перетворювачі частоти для асинхронних двигунів були розкішшю (понад 20 років тому), у промисловому устаткуванні у разі потреби застосовувалися двигуни постійного струму, в яких була можливість регулювати частоту обертів.
Спосіб цей був громіздкий, і поряд з ним використовувався ще один, простіше - застосовувалися двошвидкісні двигуни, в яких обмотки підключаються і перемикаються певним чином за схемою Даландера, що дозволяє змінювати швидкість обертання.
Двигуни постійного струму зі зміною швидкості та керуванням від електронного блоку використовуються у дорогому промисловому обладнанні. А ось двошвидкісні двигуни зустрічаються у верстатах виробництва СРСР 1980-х років середньої цінової категорії. І щодо підключення особисто у мене виникали проблеми, у зв'язку з плутаниною та нестачею інформації.
Останні приклади - токарний верстат спец. виконання, тартак. Подробиці будуть нижчими.
Виконання обмоток нагадує з'єднання "трикутником", у зв'язку з цим перемикання може бути асоційоване з "зіркою-трикутником". І це збиває з пантелику.
Схема "Зірка - Трикутник" використовується для легкого пуску двигунів (при цьому швидкість в обох режимах однакова!), А двошвидкісні двигуни з перемиканням обмоток - для перемикання робочих швидкостей.
Існують двигуни не тільки з двома, але і з великою кількістю швидкостей. Але я говоритиму про те, що особисто підключав і тримав у руках:

Поменше теорії, більше практики. І як завжди, від простого до складного.
Двошвидкісний асинхронний електродвигун
Обмотки двошвидкісного двигуна виглядають таким чином:

Схема двошвидкісного двигуна
При підключенні висновків U1, V1, W1 такого двигуна до трифазної напруги він буде включений в трикутник на знижену швидкість.
А якщо висновки U1, V1, W1 замкнути між собою, а живлення подати на висновки U2, V2, W2, то вийдуть дві «зірки» (YY), і швидкість буде вдвічі вищою.
Що буде, якщо обмотки вершин трикутника U1, V1, W1 та середин сторін U2, V2, W2 поміняти місцями? Я думаю, нічого не зміниться, тут справа лише у назвах. Хоча я не пробував. Хто знає – напишіть у коментарях до статті.
Схеми включення
Хто трохи не в курсі, як підключаються до трифазної мережі асинхронні електродвигуни — рекомендую ознайомитися з моєю статтею Підключення двигуна через магнітний контактор. Я припускаю, що читач знає, як включається електродвигун, навіщо і який потрібний захист двигуна, тому в цій статті ці питання опускаю.
(adsbygoogle = window.adsbygoogle || ).push(());
Теоретично все просто, але в практиці доводиться поламати голову.
Очевидно, що включення обмоток можна реалізувати двома шляхами через перемикач і через контактори.
Перемикання швидкостей за допомогою перемикача
Розглянемо спочатку схему простіше через перемикач типу ПКП-25-2. Тим більше, що тільки такі принципові схеми мені зустрічалися.
Перемикач повинен мати три положення, одне з яких (середнє) відповідає вимкненому двигуну. Для визначення перемикача - трохи пізніше.

Підключення двошвидкісного двигуна. Схема на перемикачі ВКП.
Хрестиками на пунктирах положення перемикача SA1 відзначені замкнені стани контактів. Тобто, у положенні 1харчування від L1, L2, L3 подається на трикутник (висновки U1, V1, W1). Висновки U2, V2, W2 залишаються не підключеними. Двигун обертається на першій зниженій швидкості.
При перемиканні SA1 у положення 2висновки U1, V1, W1 замикаються друг з одним, а живлення подається на U2, V2, W2.
Перемикання швидкостей за допомогою контакторів
При запуску за допомогою контакторів схема виглядатиме аналогічно:

Схема увімкнення двигуна на різних швидкостях на контакторах
Тут першу швидкість двигун включає контактор КМ1, на другу — КМ2. Очевидно, що фізично КМ2 повинен складатися з двох контакторів, оскільки необхідно замикання одразу п'яти силових контактів.
Практична реалізація
Насправді мені траплялися лише схеми на перемикачах ПКП-25-2. Це універсальне диво радянської комутації, яке може мати мільйон можливих поєднань контактів. Усередині є кулачок (їх теж кілька варіантів формою), який можна переставляти.
Це реальна головоломка та ребус, що вимагає високої концентрації свідомості. Добре, що кожен контакт проглядається в невелику щілинку, і можна подивитися, коли він замкнутий або розімкнений. Крім того, через ці прорізи у корпусі можна чистити контакти.
Кількість положень може бути кілька, їх кількість обмежується упорами, показаними на фото:

Перемикач пакетний ПКП-25-2
Перемикач ПКП 25. Головоломка на аматора.

Перемикач пакетний ПКП-25-2 - контакти
Практичне застосування
Як я вже казав, такі двигуни мені зустрічалися у радянських верстатах, які я відновлював.
А саме – циркулярний деревообробний верстат ЦА-2А-1, там використовується двошвидкісний асинхронний двигун 4АМ100L8/4У3. Його основні параметри – перша швидкість (трикутник) 700 об/хв, струм 5,0А, потужність 1,4 кВт, зірки – 1410 об/хв, струм 5,0 А, потужність 2,4 кВт.
Мене просили зробити кілька швидкостей, для різної деревини та для різної гостроти циркулярної пили. Але, на жаль, без перетворювача частоти тут не обійтися.
Інший дідок — токарний верстат спец.виконання УТ16П, там стоїть двигун 720/1440 об/хв, 8,9/11 А, 3,2/5,3 кВт:

Шильдик двошвидкісного електродвигуна 11 кВт токарного верстата
Перемикання також перемикачем, а схема верстата виглядає так:

схема електрична токарного верстата
У цій схемі є помилка саме за темою статті. По-перше, перемикання швидкостей здійснюється не реле Р2, а вимикачем В2. А друге (і головне) схема перемикання абсолютно не відповідає реальності. І вона мене збила з пантелику, я намагався підключити по ній. Поки що не створив таку схему:

Реальна схема увімкнення двошвидкісного двигуна токарного верстата УТ16П
Додатково зовнішній вигляд і розташування елементів електросхеми.

схема токарного верстата - зовнішній вигляд

схема електрична токарного верстата - розташування елементів
На цьому все.
Друзі! Кому трапляються такі верстати та двигуна, пишіть, ділитесь досвідом, ставте питання, буду радий!
Майже всі верстати як електропривод оснащуються асинхронними двигунами. У них проста конструкція та не висока вартість. У зв'язку з цим важливим є регулювання швидкості асинхронного двигуна. Однак у стандартній схемі включення керувати його оборотами можна лише з допомогою механічних передавальних систем (редуктори, шківи), що завжди зручно. Електричне керування оборотами ротора має більше переваг, хоча воно й ускладнює схему підключення асинхронного двигуна.
Для деяких вузлів автоматичного обладнання підходить саме електричне регулювання швидкості обертання асинхронного вала електродвигуна. Тільки так можна досягти плавного і точного налаштування робочих режимів. Існує кілька способів керування частотою обертання шляхом маніпуляцій із частотою, напругою та формою струму. Усі вони показані на схемі.
З представлених малюнку способів, найпоширенішими регулювання швидкості обертання ротора є зміна наступних параметрів:
· Напруги подається на статор,
· Допоміжного опору ланцюга ротора,
· Числа пар полюсів,
· Частоти робочого струму.
Останні два способи дозволяють змінювати швидкість обертання без значного зниження ККД та втрати потужності, інші способи регулювання сприяють зниженню ККД пропорційно величині ковзання. Але й ті й інші мають свої переваги й недоліки. Оскільки найчастіше на виробництві застосовуються асинхронні двигуни з короткозамкненим ротором, всі подальші обговорення стосуватимуться саме цього типу електродвигунів.
 Для частотного регулюваннязастосовують переважно напівпровідникові перетворювачі. Їх принцип дії заснований на особливості роботи асинхронного двигуна, де частота обертання магнітного поля статора залежить від частоти напруги мережі живлення. Швидкість обертання поля статора визначається за такою формулою:
Для частотного регулюваннязастосовують переважно напівпровідникові перетворювачі. Їх принцип дії заснований на особливості роботи асинхронного двигуна, де частота обертання магнітного поля статора залежить від частоти напруги мережі живлення. Швидкість обертання поля статора визначається за такою формулою:
n1 = 60f/p, де n1 - частота обертання поля (об/хв), f-частота мережі живлення (Гц), p-число пар полюсів статора, 60 - коефіцієнт перерахунку мірності.
Для ефективної роботи асинхронного електродвигуна без втрат потрібно разом з частотою змінювати і напругу, що подається. Напруга повинна змінюватись залежно від моменту навантаження. Якщо навантаження постійне, то напруга змінюється пропорційно до частоти.
Сучасні частотні регулятори дозволяють зменшувати та збільшувати оберти у широкому діапазоні. Це забезпечило їх широке застосування в обладнанні з керованою протяжкою, наприклад, багатоконтактних верстатах зварної сітки. Вони швидкість обертання асинхронного двигуна, що приводить в рух намотувальний вал, регулюється напівпровідниковим перетворювачем. Таке регулювання дозволяє оператору, що стежить за правильністю виконання технологічних операцій, поступово прискорюватися або сповільнюватися в міру налаштування верстата.
Зупинимося принципі роботи перетворювача частоти докладніше. У його основі лежить принцип подвійного перетворення. Складається регулятор з випрямляча, імпульсного інвертора та системи керування. У випрямлячі синусоїдальна напруга перетворюється на постійну і подається на інвертор. У складі силового трифазного імпульсного інвертора є шість транзисторних перемикачів. Через ці автоматичні ключі постійна напруга подається на обмотки статора так, що в потрібний момент відповідні обмотки надходить то прямий, то зворотний струм зі зсувом фаз 120°. Таким чином, постійна напруга трансформується в змінну трифазну напругу потрібної амплітуди та частоти.
Необхідні параметри задаються через модуль керування. Автоматичне регулювання роботи ключів здійснюється за принципом широтно-імпульсної модуляції. Як силові перемикачі використовуються потужні IGBT-транзистори. Вони, порівняно з тиристорами, мають високу частоту перемикання і видають майже синусоїдальний струм із мінімальними спотвореннями. Незважаючи на практичність таких пристроїв, їхня вартість для двигунів середньої та високої потужності залишається дуже високою.
 Регулювання швидкості обертання асинхронного двигуна методом зміни числа пар полюсівтакож відноситься до найбільш поширених методів керування електродвигунів із короткозамкненим ротором. Такі двигуни називаються багатошвидкісними. Є два способи здійснення цього методу:
Регулювання швидкості обертання асинхронного двигуна методом зміни числа пар полюсівтакож відноситься до найбільш поширених методів керування електродвигунів із короткозамкненим ротором. Такі двигуни називаються багатошвидкісними. Є два способи здійснення цього методу:
· Укладання відразу декількох обмоток з різними числами пар полюсів у загальні пази статора,
· Застосування спеціальної намотування з можливістю перемикання існуючих обмоток під необхідну кількість пар полюсів.
У першому випадку, щоб укласти в пази додаткові обмотки, потрібно зменшити перетин дроту, а це призводить до зменшення номінальної потужності електродвигуна. У другому випадку має місце ускладнення комутаційної апаратури, особливо для трьох і більше швидкостей, а також погіршуються енергетичні характеристики. Докладніше цей та інші способи регулювання швидкості асинхронного двигуна описані в архівному файлі, який можна завантажити внизу сторінки.
Зазвичай багатошвидкісні двигуни випускаються на 2, 3 або 4 швидкості обертання, причому 2-х швидкісні двигуни випускаються з однією обмоткою на статорі та з перемиканням числа пар полюсів щодо 2: 1 = р2: pt , 3-х швидкісні двигуни - з двома обмотками на статорі, у тому числі одна виконується з перемиканням 2: 1 = Рг: Pi , 4-х швидкісні двигуни - з двома обмотками на статорі, кожна з яких виконується з перемиканням числа пар полюсів щодо 2:1. Багатошвидкісними електродвигунами оснащуються різні верстати, вантажні та пасажирські ліфти, вони використовуються для приводів вентиляторів, насосів тощо.
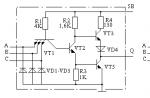
3.Схема нереверсивного керування пуском трифазного асинхронного двигуна з фазним ротором.
http://www.ngpedia.ru/pngs/016/0166rYE3L7C0J713C9B4.png\
3) три реле часу /РВ, 2PS та ЗРВ маятникового типу, механічно зчленовані відповідно з контакторами К, /У та 2У;
4) кнопки «стоп» та «пуск».
У вихідному положенні, коли двигун відключений, всі контактори вимкнені і в ланцюг кожної фази ротора включено сумарний опір гр + rp2 + грз всіх трьох ступенів пускового реостату. При натисканні кнопки «пуск» замикається ланцюг котушки контактора, контактор спрацьовує і починається перший етап пуску двигуна при повному опорі в ланцюгу ротора. Контактор До, спрацьовуючи, приводить у дію механічно зчленоване з ним реле часу IP В. Через /) секунд це реле замкне свій контакт в ланцюзі включає котушки контактора /У.
Контактор 1У спрацьовує, і ланцюги ротора двигуна залишаться включеними опору гр2 + г„3 двох ступенів реостата. Цим починається другий етап запуску двигуна. Контактор /У приведе в дію зчленоване з ним реле 2РВ, яке через 12 секунд замкне свій контакт у ланцюзі котушки контактора 2У. Контактор 2У спрацює та вимкне другий ступінь реостату. У ланцюзі ротора залишиться включеним тільки опір грз- Контактор 2У приведе в дію реле ЗРВ і через ta секунд замкнеться ланцюг котушки контактора ЗУ. Останній спрацює і замкне обмотки ротора двигуна коротко, ніж і буде завершено процес пуску двигуна.
При відключенні двигуна треба натиснути кнопку стоп. При цьому втратять живлення котушки контакторів К/У, 2У і ЗУ. Контактори відключаться і вся схема повернеться у вихідне положення.
Вище було розглянуто щодо прості схеми керування асинхронними двигунами. На практиці застосовуються також складніші схеми, що дозволяють керувати процесом пуску, гальмування, регулювання та стабілізації швидкості електроприводів з двигунами постійного та змінного струму.
Мал. 18 8. Схема керування пуском нереверсивного асинхронного двигуна з фазним ротором
4. Внутрішні РУ
Розподільний пристрій(РУ) - електроустановка, що служить для прийому та розподілу електричної енергії одного класу напруги.
Розподільний пристрій містить набір комутаційних апаратів, допоміжні пристрої РЗіА та засоби обліку та вимірювання
Напрямок обертання валу електродвигуна іноді потрібно змінити. Для цього потрібна реверсивна схема підключення. Її вид залежить від того, який у вас двигун: постійного або змінного струму, 220В або 380В. І зовсім інакше влаштований реверс трифазного двигуна, включеного в однофазну мережу.
Для реверсивного підключення трифазного асинхронного електродвигуна візьмемо за основу схему його включення без реверсу:
Ця схема дозволяє обертатися валу лише в один бік – уперед. Щоб змусити його повернутися в іншу, потрібно поміняти місцями будь-які дві фази. Але в електриці прийнято змінювати лише А і В, незважаючи на те, що до такого ж результату привели б зміни А на С і В на С. Схематично це виглядатиме так:

Для підключення додатково знадобляться:
- Магнітний пускач (або контактор) – КМ2;
- Трикнопкова станція, що складається з двох нормально замкнутих та одного нормально розімкнутого контактів (додана кнопка Пуск2).
Важливо!В електриці нормально замкнутий контакт – це стан кнопкового контакту, який має лише два несиметричні стани. Перше положення (нормальне) – робоче (замкнене), а друге – пасивне (розімкнуте). Так само формулюється поняття нормально розімкнутого контакту. У першому положенні кнопка пасивна, а в другому активна. Зрозуміло, що така кнопка називатиметься «СТОП», тоді як дві інші: «ВПЕРЕД» та «НАЗАД».

Схема реверсивного підключення мало відрізняється від простої. Головна її відмінність полягає в електроблокуванні. Вона необхідна для виключення запуску двигуна відразу в двох напрямках, що призвело б до поломки. Конструктивно блокування - це блок з клемами магнітних пускачів, які з'єднані в керуючому ланцюзі.
Для запуску двигуна:
- Увімкніть автомати АВ1 та АВ2;
- Натисніть кнопку Пуск1 (SB1) для обертання валу за годинниковою стрілкою або Пуск2 (SB2) для обертання у зворотний бік;
- Двигун працює.
Якщо потрібно змінити напрямок, спочатку потрібно натиснути кнопку «СТОП». Потім увімкнути іншу пускову кнопку. Електричне блокування не дозволяє активувати його, якщо двигун не вимкнений.
Змінна мережа: електродвигун 220 до мережі 220
Реверс електродвигуна 220В можливий лише в тому випадку, якщо виводи обмоток лежать поза корпусом. На малюнку нижче – схема однофазного включення, коли пускова та робоча намотування розташовані всередині та висновків назовні не мають. Якщо це ваш варіант, ви не зможете змінити напрямок обертання валу.

У будь-якому іншому випадку для реверсування однофазного конденсаторного АТ необхідно змінити напрямок робочої обмотки. Для цього вам знадобляться:
- Автомат;
- Кнопковий пост;
- Контактори.

Схема однофазного агрегату майже нічим не відрізняється від тієї, що представлена трифазного асинхронного двигуна. Раніше ми перекидали фази: А і В. Зараз при зміні напрямку замість фазного дроту з одного боку робочої обмотки підключатиметься нульовий, а з іншого – замість нульового фазний. І навпаки.