Po szczegółowym rozważeniu schematów 4WD zastosowanych w Toyocie w poprzednich materiałach okazało się, że w przypadku innych marek nadal istnieje próżnia informacyjna. Zacznijmy od samochodów z napędem na wszystkie koła Subaru, które wielu nazywa „najbardziej realnymi, zaawansowanymi i poprawnymi”.
Skrzynki mechaniczne, zgodnie z tradycją, mało nas interesują. Co więcej, wszystko jest z nimi dość przejrzyste - od drugiej połowy lat 90. mechanicy Subaru mają uczciwy napęd na wszystkie koła z trzema mechanizmami różnicowymi (środkowy mechanizm różnicowy jest blokowany przez zamknięte sprzęgło wiskotyczne). Z negatywnych stron warto wymienić zbyt skomplikowaną konstrukcję, wynikającą z połączenia silnika montowanego wzdłużnie i oryginalnego napędu na przednie koła. Podobnie jak odmowa Subarowitów od dalszego masowego stosowania tak niewątpliwie przydatnej rzeczy, jak redukcja biegów. W pojedynczych „sportowych” wersjach dostępna jest również bardzo zaawansowana manualna skrzynia biegów z „elektronicznie sterowanym” centralnym mechanizmem różnicowym, gdzie kierowca może zmieniać stopień jego zablokowania w trakcie jazdy…
Ale nie dygresujmy. Istnieją dwa główne rodzaje napędu na 4 koła stosowane w automatycznych skrzyniach biegów obsługiwanych obecnie przez Subaru.
1. Aktywny AWD


Ta opcja jest od dawna instalowana w zdecydowanej większości Subaru (z automatyczną skrzynią biegów typu TZ1). W rzeczywistości ten „napęd na wszystkie koła” jest tak „uczciwy”, jak V-Flex lub ATC Toyoty - te same tylne koła typu plug-in i ta sama zasada TOD (Torque on Demand). Nie ma centralnego mechanizmu różnicowego, a napęd na tylne koła jest włączany przez sprzęgło hydromechaniczne w skrzyni rozdzielczej - cofa się od ~ 10% siły w normalnych warunkach (jeśli nie jest to przypisane tarciu wewnętrznemu w sprzęgle) do prawie 50% w stanie granicznym.
Chociaż schemat Subar ma pewne zalety w działającym algorytmie w porównaniu z innymi typami wtyczek 4WD. Choć mały, ale moment podczas działania A-AWD (chyba że system zostanie wyłączony na siłę) jest nadal przekazywany z powrotem w sposób ciągły, a nie tylko w przypadku poślizgu przednich kół - jest to bardziej przydatne i wydajne. Dzięki hydromechanice możliwa jest redystrybucja siły (choć zbyt głośno mówi się o redystrybucji - wystarczy wybrać część) dokładniej niż w ATC elektromechanicznym - A-AWD jest w stanie lekko popracować zarówno na zakrętach, jak i podczas przyspieszenie i hamowanie, i będzie strukturalnie mocniejszy. Zmniejszono prawdopodobieństwo gwałtownego spontanicznego „pojawienia się” tylnego napędu w zakręcie z późniejszym niekontrolowanym „lotem” (takie niebezpieczeństwo istnieje w przypadku samochodów ze sprzęgłem wiskotycznym do łączenia tylnych kół).
Aby poprawić właściwości terenowe, Subaru często instaluje automatyczny mechanizm blokujący (lepkie sprzęgło, „krzywkowy mechanizm różnicowy” - patrz poniżej) w tylnym mechanizmie różnicowym modeli z A-AWD.
2. VTD AWD


Schemat VTD (Variable Torque Distribution) jest stosowany w mniej masowo produkowanych wersjach z automatycznymi skrzyniami biegów, takich jak TV1 (oraz TZ102Y w przypadku Imprezy WRX GF8) - z reguły najmocniejszy w gamie. Tutaj wszystko jest w porządku z „uczciwością” - napęd na cztery koła jest naprawdę stały, z mechanizmem różnicowym międzyosiowym (blokowanym sprzęgłem hydromechanicznym). Nawiasem mówiąc, od połowy lat 80. Toyota 4WD pracowała na tej samej zasadzie w skrzyniach A241H i A540H, ale teraz niestety pozostała tylko w oryginalnych modelach z napędem na tylne koła (FullTime-H lub i- napęd na cztery koła).
Każda ulotka VTD stwierdza, że „moment obrotowy jest dzielony 45/55 między przednie i tylne koła”. I wow, wielu zaczyna wierzyć, że są napędzani do przodu po torze przez 55% napęd na tylne koła. Musisz zrozumieć, że te liczby są abstrakcyjnym wskaźnikiem. Kiedy samochód porusza się po linii prostej, a wszystkie koła obracają się z tą samą prędkością, centralny mechanizm różnicowy oczywiście nie działa, a moment jest wyraźnie podzielony między osie na pół. Co oznaczają 45 i 55? Tylko przełożenia w przekładni planetarnej mechanizmu różnicowego. Jeśli przednie koła zostaną całkowicie zatrzymane siłą, wspornik mechanizmu różnicowego również się zatrzyma, a przełożenie między tylnym wałem napędowym a wałem wejściowym skrzyni rozdzielczej będzie po prostu takie samo 55/100, czyli 55% rozwiniętego momentu obrotowego przez silnik cofnie się (mechanizm różnicowy będzie działał jako nadbieg). Jeśli tylne koła zamarzną, wówczas 45% momentu obrotowego przejdzie do przodu przez wspornik mechanizmu różnicowego w ten sam sposób. Oczywiście obecność blokowania nie jest tutaj brana pod uwagę i rzeczywiście… W rzeczywistości rozkład momentów jest stałą wartością zmienną i jest daleki od jednoznaczności.
Subaru zwykle dołącza do VTD dość zaawansowany system VDC (Vehicle Dynamic Control), naszym zdaniem - system stabilności kursu walut. Na starcie jego element, TCS (Traction Control System), spowalnia ślizgające się koło i lekko dusi silnik (po pierwsze przez ustawienie zapłonu, a po drugie nawet przez wyłączenie części dysz). Klasyczna dynamiczna stabilizacja działa w ruchu. Otóż dzięki możliwości dowolnego spowolnienia któregoś z kół VDC emuluje (symuluje) blokadę mechanizmu różnicowego międzyosiowego. Oczywiście to świetnie, ale nie należy poważnie polegać na możliwościach takiego systemu - jak dotąd żadnemu z producentów samochodów nie udało się nawet zbliżyć „elektronicznego zamka” do tradycyjnej mechaniki pod względem niezawodności i, co najważniejsze, , efektywność.
3. „V-Flex”
Prawdopodobnie warto wspomnieć o 4WD, który jest używany w małych modelach z CVT (takich jak Vivio i Pleo). Tutaj schemat jest jeszcze prostszy - stały napęd na przednie koła i tylna oś „połączona” sprzęgłem wiskotycznym, gdy przednie koła się ślizgają.
O mechanizmie różnicowym krzywki

1 - separator, 2 - krzywki prowadzące,
3 - łożysko oporowe, 4 - obudowa mechanizmu różnicowego, 5 - podkładka, 6 - piasta
Powiedzieliśmy już, że w języku angielskim wszystkie samoblokujące mechanizmy różnicowe mieszczą się w koncepcji LSD, jednak w naszej tradycji nazywa się to zwykle układem ze sprzęgłem wiskotycznym. Tylny mechanizm różnicowy LSD często stosowany w Subaru jest zbudowany inaczej - można go nazwać „tarciowym, krzywkowym”. W rzeczywistości nie ma sztywnego połączenia między kołem napędowym mechanizmu różnicowego a półosiami, różnica prędkości kątowych obrotu wynika z poślizgu jednej półosi względem drugiej, a „blokada” jest nieodłącznym elementem sama zasada działania.

Separator obraca się wraz z obudową mechanizmu różnicowego. „Klucze” zamocowane na separatorze mogą poruszać się w kierunku poprzecznym. Występy i wgłębienia krzywek (nazwijmy je tak) wraz z klawiszami tworzą przekładnię obrotową, jak łańcuch.
Jeśli opór na kołach jest taki sam, wówczas klucze nie ślizgają się, a półosie obracają się z tą samą prędkością. Jeśli opór na jednym kole jest zauważalnie większy, wówczas klucze zaczynają ślizgać się wzdłuż wnęk i występów odpowiedniej krzywki, wciąż próbując obrócić ją w kierunku obrotu separatora. W przeciwieństwie do mechanizmu różnicowego typu planetarnego, prędkość obrotowa drugiej półosi nie wzrasta (to znaczy, jeśli jedno koło jest nieruchome, drugie nie będzie się obracać dwa razy szybciej niż obudowa mechanizmu różnicowego).
O tym, czy samochód z takim mechanizmem różnicowym może „jeździć na jednym kole”, decyduje aktualny bilans między oporami na półosi, prędkością obrotową nadwozia, wielkością siły przenoszonej z powrotem i tarciem w klinie -para krzywek. Jednak ten projekt z pewnością nie jest „terenowy”.
10.05.2006
Po szczegółowym zbadaniu schematów 4WD stosowanych w Toyocie w poprzednich materiałach okazało się, że w przypadku innych marek nadal istnieje próżnia informacyjna ... Weźmy najpierw napęd na cztery koła samochodów Subaru, który wielu nazywa „najbardziej prawdziwy, zaawansowany i poprawny”.
Skrzynki mechaniczne, zgodnie z tradycją, mało nas interesują. Co więcej, wszystko jest z nimi dość przejrzyste - od drugiej połowy lat 90. wszystkie Subaru w mechanice mają uczciwy napęd na wszystkie koła z trzema mechanizmami różnicowymi (środkowy mechanizm różnicowy jest blokowany przez zamknięte sprzęgło wiskotyczne). Z negatywnych stron warto wspomnieć o zbyt skomplikowanej konstrukcji uzyskanej poprzez połączenie silnika montowanego wzdłużnie i oryginalnego napędu na przednie koła. Podobnie jak odmowa Subarowitów od dalszego masowego stosowania tak niewątpliwie przydatnej rzeczy, jak redukcja biegów. W pojedynczych „sportowych” wersjach Imprezy STi dostępna jest również zaawansowana manualna skrzynia biegów z „elektronicznie sterowanym” centralnym mechanizmem różnicowym (DCCD), w której kierowca może zmieniać stopień jego zablokowania w trakcie jazdy…
Ale nie dygresujmy. Istnieją dwa główne rodzaje napędu na 4 koła stosowane w automatycznych skrzyniach biegów obsługiwanych obecnie przez Subaru.
|
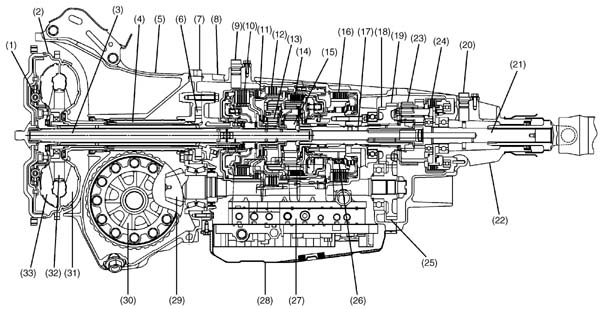
1.1. Aktywny AWD / Aktywny podział momentu obrotowego AWD |
Stały napęd na przednie koła, bez centralnego mechanizmu różnicowego, połączenie tylnych kół ze sterowanym elektronicznie sprzęgłem hydromechanicznym
 |
|
1 - amortyzator blokady sprzęgła hydrokinetycznego, 2 - sprzęgło sprzęgła hydrokinetycznego, 3 - wał wejściowy, 4 - wał napędowy pompy oleju, 5 - obudowa sprzęgła hydrokinetycznego, 6 - pompa oleju, 7 - obudowa pompy oleju, 8 - obudowa skrzyni biegów, 9 - czujnik prędkości koła turbiny, 10 - 4 sprzęgło, 11 - sprzęgło biegu wstecznego, 12 - 2-4 hamulec, 13 - komplet planetarnych kół przednich, 14 - 1 sprzęgło, 15 - komplet planetarnych kół tylnych, 16 - 1 bieg hamulca i wsteczny , 17 - wał wyjściowy skrzyni biegów, 18 - koło zębate trybu "P", 19 - koło zębate napędu przedniego, 20 - czujnik prędkości wałka wyjściowego tylnego, 21 - wał wyjściowy tylny, 22 - trzpień, 23 - sprzęgło A- AWD, 24 - napęd przedni napędzane koło zębate, 25 - wolnobieg, 26 - blok zaworów, 27 - miska olejowa, 28 - przedni wał wyjściowy, 29 - przekładnia hipoidalna, 30 - wirnik, 31 - stojan, 32 - turbina. |
mi ta opcja jest od dawna montowana w zdecydowanej większości Subaru (z automatyczną skrzynią biegów typu TZ1) i jest powszechnie znana z modelu Legacy 89. W rzeczywistości ten napęd na cztery koła jest tak „uczciwy”, jak nowa Toyota Active Torque Control - ten sam napęd na tylne koła i ta sama zasada TOD (Torque on Demand). Nie ma centralnego mechanizmu różnicowego, a napęd na tylne koła jest uruchamiany przez sprzęgło hydromechaniczne (zespół cierny) w skrzyni rozdzielczej.
Schemat Subar ma pewne zalety w działającym algorytmie w porównaniu z innymi typami wtyczek 4WD (szczególnie najprostszymi, takimi jak prymitywny V-Flex). Choć mały, ale moment podczas działania A-AWD jest stale przekazywany z powrotem (chyba że system zostanie wyłączony na siłę), a nie tylko wtedy, gdy przednie koła się ślizgają - jest to bardziej przydatne i wydajne. Dzięki hydromechanice siłę można redystrybuować nieco dokładniej niż w elektromechanicznym ATC. Ponadto A-AWD jest strukturalnie trwalszy. W samochodach ze sprzęgłem wiskotycznym do łączenia tylnych kół istnieje niebezpieczeństwo gwałtownego spontanicznego „pojawienia się” tylnego napędu na zakręcie, po którym następuje niekontrolowany „lot”, ale w A-AWD to prawdopodobieństwo, choć nie do końca wykluczona, ulega znacznemu zmniejszeniu. Jednak wraz z wiekiem, w miarę zużycia, przewidywalność i płynność połączenia tylnych kół znacznie spada.
Algorytm systemu pozostaje taki sam przez cały okres wydania, tylko nieznacznie poprawiony.
1) W normalnych warunkach, przy całkowicie zwolnionym pedale przyspieszenia, rozdział momentu obrotowego między przednie i tylne koła wynosi 95/5..90/10.
2) W miarę dodawania gazu zaczyna rosnąć ciśnienie dostarczane do pakietu sprzęgła, tarcze stopniowo się zaciskają i rozkład momentu obrotowego zaczyna przesuwać się w kierunku 80/20 ... 70/30 ... itd. Zależność między ciśnieniem gazu a ciśnieniem w przewodzie nie jest bynajmniej liniowa, ale raczej przypomina parabolę - tak, że znacząca redystrybucja występuje tylko przy mocnym wciśnięciu pedału. Przy całkowicie cofniętym pedale sprzęgła cierne są wciskane z maksymalnym wysiłkiem, a rozkład osiąga 60/40 ... 55/45. Dosłownie „50/50” nie jest osiągane w tym schemacie - to nie jest twardy zamek.
3) Dodatkowo zamontowane na skrzyni czujniki prędkości przedniego i tylnego wału wyjściowego umożliwiają określenie poślizgu przednich kół, po którym odbierana jest maksymalna część momentu niezależnie od stopnia zasilania gazem ( z wyjątkiem przypadku całkowicie zwolnionego akceleratora). Ta funkcja jest aktywna przy niskich prędkościach, do około 60 km/h.
4) Po wciśnięciu 1. biegu (selektora) sprzęgła są natychmiast wciskane z maksymalnym możliwym ciśnieniem - w ten sposób określane są niejako „trudne warunki terenowe”, a napęd pozostaje najbardziej „trwale pełny”.
5) Po wpięciu bezpiecznika „FWD” do złącza nie dochodzi do nadciśnienia na sprzęgło i napęd odbywa się stale tylko na przednie koła (rozkład „100/0”).
6) Wraz z rozwojem elektroniki samochodowej wygodniejsze stało się kontrolowanie poślizgu za pomocą standardowych czujników ABS i zmniejszanie stopnia blokowania sprzęgła podczas pokonywania zakrętów lub uruchamiania ABS.
Należy zauważyć, że wszystkie rozkłady paszportowe momentów podane są tylko w statyce - podczas przyspieszania/zwalniania zmienia się rozkład masy wzdłuż osi, więc rzeczywiste momenty na osiach są różne (czasem „bardzo różne”), podobnie jak przy różnych współczynniki przyczepności kół do jezdni.
|
1.2. VTD AWD |
Stały napęd na cztery koła, z centralnym mechanizmem różnicowym, sterowana elektronicznie hydromechaniczna blokada sprzęgła
 |
|
1 - amortyzator blokady sprzęgła hydrokinetycznego, 2 - sprzęgło sprzęgła hydrokinetycznego, 3 - wał wejściowy, 4 - wał napędowy pompy oleju, 5 - obudowa sprzęgła hydrokinetycznego, 6 - pompa oleju, 7 - obudowa pompy oleju, 8 - obudowa skrzyni biegów, 9 - czujnik prędkości koła turbiny, 10 - 4 sprzęgło, 11 - sprzęgło biegu wstecznego, 12 - 2-4 hamulec, 13 - komplet planetarnych kół przednich, 14 - 1 sprzęgło, 15 - komplet planetarnych kół tylnych, 16 - 1 bieg hamulca i wsteczny , 17 - wał pośredni, 18 - tryb „P”, 19 - przednie koło napędowe, 20 - czujnik prędkości tylnego wału wyjściowego, 21 - tylny wał wyjściowy, 22 - trzpień, 23 - centralny mechanizm różnicowy, 24 - sprzęgło blokady centralnego mechanizmu różnicowego, 25 - napędzane przednie koło zębate napędu, 26 - sprzęgło jednokierunkowe, 27 - blok zaworów, 28 - miska olejowa, 29 - przedni wał wyjściowy, 30 - przekładnia hipoidalna, 31 - wirnik, 32 - stojan, 33 - turbina . |
Schemat VTD (Variable Torque Distribution) jest stosowany w mniej masowo produkowanych wersjach z automatycznymi skrzyniami biegów, takich jak TV1 (oraz TZ102Y w przypadku Imprezy WRX GF8) - z reguły najmocniejszy w gamie. Tutaj wszystko jest w porządku z „uczciwością” - napęd na wszystkie koła jest naprawdę stały, z asymetrycznym centralnym mechanizmem różnicowym (45:55), który jest blokowany przez sterowane elektronicznie sprzęgło hydromechaniczne. Nawiasem mówiąc, od połowy lat 80. Toyota 4WD pracowała na tej samej zasadzie w skrzyniach A241H i A540H, ale teraz niestety pozostała tylko w oryginalnych modelach z napędem na tylne koła (FullTime-H lub i- napęd na cztery koła).
Subaru zwykle dołącza do VTD dość zaawansowany system VDC (Vehicle Dynamic Control), naszym zdaniem - system stabilności lub stabilizacji kursu walutowego. Na starcie jego element, TCS (Traction Control System), spowalnia ślizgające się koło i lekko dusi silnik (po pierwsze przez ustawienie zapłonu, a po drugie nawet przez wyłączenie części dysz). Klasyczna dynamiczna stabilizacja działa w ruchu. Otóż dzięki możliwości dowolnego spowolnienia któregoś z kół VDC emuluje (symuluje) blokadę mechanizmu różnicowego międzyosiowego. Oczywiście to świetnie, ale nie należy poważnie polegać na możliwościach takiego systemu - jak dotąd żadnemu z producentów samochodów nie udało się nawet zbliżyć „elektronicznego zamka” do tradycyjnej mechaniki pod względem niezawodności i, co najważniejsze, , efektywność.
|
1.3. „V Flex” |
Stały napęd na przednie koła, brak centralnego mechanizmu różnicowego, sprzęgło wiskotyczne na tylne koła
Prawdopodobnie warto wspomnieć o 4WD, który jest używany w małych modelach z CVT (takich jak Vivio i Pleo). Tutaj schemat jest jeszcze prostszy - stały napęd na przednie koła i tylna oś „połączona” sprzęgłem wiskotycznym, gdy przednie koła się ślizgają.
Powiedzieliśmy już, że w języku angielskim pod pojęciem LSD każdy dostaje samoblokujące mechanizmy różnicowe, ale w naszej tradycji jest to zwykle nazywane układem ze sprzęgłem wiskotycznym. Ale Subaru zastosowało w swoich samochodach całą gamę dyferencjałów LSD w różnych konstrukcjach…
2.1. Lepkie LSD starego typu
 |
 |
W mechanizmie różnicowym LSD prawe i lewe koło zębate są „połączone” poprzez sprzęgło wiskotyczne - prawy wielowypustowy wał przechodzi przez miskę i sprzęga się z piastą sprzęgła (satelity mechanizmu różnicowego są zamontowane wspornikowo). Obudowa sprzęgła stanowi jedną całość z kołem zębatym półosi lewej. We wnęce wypełnionej płynem silikonowym i powietrzem na wypustach piasty i korpusu znajdują się tarcze - zewnętrzne utrzymywane są przez pierścienie dystansowe, wewnętrzne mają możliwość lekkiego przesuwania się wzdłuż osi (dla możliwości uzyskania „efekt garbu”). Sprzęgło działa bezpośrednio na różnicę prędkości pomiędzy prawą i lewą półoś.
 |
Podczas ruchu prostoliniowego prawe i lewe koło obracają się z tą samą prędkością, miseczka mechanizmu różnicowego i boczne koła zębate poruszają się razem, a moment obrotowy jest równo dzielony między półosie. Gdy występuje różnica w częstotliwości obracania się kół, obudowa i piasta z zamocowanymi do nich tarczami poruszają się względem siebie, co powoduje pojawienie się siły tarcia w płynie silikonowym. Dzięki temu w teorii (tylko w teorii) powinna nastąpić redystrybucja momentu obrotowego pomiędzy kołami.
2.2. Nowy lepki LSD
 |
 |
- Manualna skrzynia biegów Impreza WRX do 1997r
- Forester SF, SG (oprócz wersji FullTime VTD + VDC)
- Legacy 2.0T, 2.5 (z wyjątkiem wersji FullTime VTD + VDC)
Płyn roboczy - olej przekładniowy klasy API GL-5, lepkość wg SAE 75W-90, pojemność ~0,8 / 1,1 l.
2.3. LSD tarcia
 |
Następnym w kolejności wyglądem jest cierny mechaniczny mechanizm różnicowy, stosowany w większości wersji Imprezy STi od połowy lat 90-tych. Zasada jego działania jest jeszcze prostsza - boczne koła zębate mają minimalny luz osiowy, między nimi a obudową mechanizmu różnicowego montowany jest zestaw podkładek. Gdy występuje różnica prędkości między kołami, mechanizm różnicowy działa jak każdy wolny. Satelity zaczynają się obracać, podczas gdy koła zębate półosi są obciążone, których składowa osiowa naciska na pakiet podkładek, a mechanizm różnicowy jest częściowo zablokowany.
Cierny mechanizm różnicowy typu krzywkowego został po raz pierwszy zastosowany przez Subaru w 1996 roku w turbo Imprezach, a następnie pojawił się w wersjach Forester STi. Zasada jego działania jest dobrze znana większości z naszych klasycznych ciężarówek, shishigów i UAZ-ów.
W rzeczywistości nie ma sztywnego połączenia między kołem napędowym mechanizmu różnicowego a półosiami, różnica w prędkości kątowej obrotu jest zapewniona przez poślizg jednej półosi względem drugiej. Separator obraca się razem z obudową mechanizmu różnicowego, klawisze (lub „krakersy”) zamocowane na separatorze mogą poruszać się w kierunku poprzecznym. Występy i wnęki wałków rozrządu wraz z wpustami tworzą przekładnię obrotową, jak łańcuch.
 |
Zakres (w modelach na rynek krajowy):
- Impreza WRX po 1996r
- Forester STi
Płynem roboczym jest zwykły olej przekładniowy klasy API GL-5, lepkość wg SAE 75W-90, pojemność ~0,8 l.
Eugeniusz
Moskwa
[e-mail chroniony] strona internetowa
Legion-Autodata
Informacje na temat obsługi i naprawy samochodu można znaleźć w książce (książkach):
Szybki skok do sekcji
Światowa premiera crossovera Subaru XV, stworzonego na bazie modelu Subaru Impreza, miała miejsce w 2011 roku i dziś ten samochód mocno ugruntował swoją pozycję w szeregach miejskich SUV-ów.
Prześwitu nigdy za dużo, szczególnie w naszych warunkach.
Dlatego warto zapoznać się z crossoverem, który ma maksymalny prześwit. To jest nowe Subaru XV, które ma prześwit 220 mm. Samochód ten, podobnie jak Subaru Forester, zbudowany jest na platformie nowej Imprezy. Jest nieco mniejszy niż „leśniczy”, ale jego prześwit jest dokładnie taki sam. Plus obowiązkowy napęd na wszystkie koła. To jest Subaru!
Dlaczego samochód potrzebuje tak imponującej odległości między drogą a karoserią? Zapytajcie tych, którzy mieszkają poza miastem i codziennie pokonują kilometry nie najlepszych dróg. Również na to pytanie odpowiedzą ci, którzy mieszkają w mieście, ale na tych ulicach, gdzie nie ma asfaltu.

Alternatywna opcja
Jednak prześwit nie jest jedynym kryterium przy wyborze wszechstronnego pojazdu. W końcu, gdyby tak było, to po prostu nie było alternatywy dla równego SUV-a, ale taka alternatywa istnieje. Subaru XV pod względem możliwości terenowych może dawać szanse niejednemu framerowi, a jeśli chodzi o zachowanie na asfalcie i zużycie paliwa, to niemal każde porównanie wypadnie na korzyść crossovera.
Aby lepiej zrozumieć wymiary Subaru XV, przedstawiamy dane Forestera. XV jest o 15 cm krótszy i 12 cm niższy, ale mają prawie taki sam rozstaw osi. W praktyce nikt nie odczuje różnicy 5 mm, dlatego też wnętrze Subaru XV jest prawie tak przestronne jak w Foresterze.
Specyfikacje
- Długość: 4450 mm
- Szerokość: 1780 mm
- Wysokość: 1615 mm
- Rozstaw osi: 2635 mm
- Masa własna: 1415 kg
- Prześwit: 22 cm
- Pojemność bagażnika: 310 / 1210 litrów
Różnica długości jest zauważalna tylko w objętości pnia. Jeśli Forester ma 505 litrów, to Subaru XVI ma tylko 310. Z drugiej strony, jak na większość kompaktowych pięciodrzwiowych to całkiem normalna liczba. Oczywiście bagażnik można powiększyć czterokrotnie, jeśli złoży się tylne siedzenia. W przypadku samochodu z napędem na wszystkie koła zawsze istnieje ogólny bagaż, z którym trzeba wybrać się na wycieczkę do natury.
Tak, oparcia tylnej kanapy nie mają możliwości regulacji kąta nachylenia. Ale lądowanie tutaj jest lżejsze niż w Foresterze, a to pozwala poruszać się po asfalcie z większą pewnością. To Subaru jest w stanie pokonywać zakręty z prędkościami godnymi najlepszych marek samochodów luksusowych.
Fakt, że samochód ma prześwit 22 cm, absolutnie nie jest odczuwalny. I to zrozumiałe, dlaczego. Silnik typu bokser tradycyjnie pozwala obniżyć środek ciężkości niż inne samochody. Do tego stały napęd na wszystkie koła i bardzo dobrze dopracowany system stabilizacji kursu walut.
Jeśli chodzi o silniki, mamy Subaru XV dostępne z dwoma silnikami, oba benzynowe. Objętość jednostki podstawowej wynosi 1600 „kostek”. Ma 114 KM.
Ale o wiele bardziej interesujący jest oczywiście dwulitrowy silnik, w którym znajduje się półtora setki koni mechanicznych. Dzięki niemu przyspieszenie od zera do pierwszej setki zajmuje 10,5 sekundy, a spalanie w cyklu mieszanym to niecałe 8 litrów na 100 km. A oto co ciekawe: wskaźnik ten dla wersji z automatyczną skrzynią biegów jest lepszy niż dla samochodu z 6-biegową manualną skrzynią biegów.

Silniki:
- Benzyna 1,6 litra
- Moc 114 KM
- Moment obrotowy: 150 Nm
- Maksymalna prędkość: 179 km/h
- Czas przyspieszenia do 100 km/h: 13,1 sek
- 2 litry benzyny
- Moc 150 KM
- Moment obrotowy: 198 Nm
- Prędkość maksymalna: 187 km/h
- Czas przyspieszenia do 100 km/h: 10,7 sek
- Średnie spalanie: 6,5 litra na 100 km
Cechy wariatora
Powód jest prosty: tutaj, podobnie jak w przypadku Forestera nowej generacji, nie jest to klasyczny automat, ale Lineartronic CVT. Oznacza to, że nie ma zmiany biegów jako takiej, ale jest stale niesłabnąca przyczepność w prawie całym zakresie obrotów. Jest trochę wycia charakterystycznego dla wariatora, ale tonie w specyficznym przyjemnym dźwięku silnika boksera. Zwłaszcza jeśli ten silnik się kręci.
Nawiasem mówiąc, w razie potrzeby wariator zapewnia możliwość zmiany biegów w trybie ręcznym, ponadto nie tylko za pomocą selektora, ale także za pomocą łopatek zmiany biegów. Chociaż, szczerze mówiąc, CVT wykonuje świetną robotę bez podpowiedzi kierowcy.
Jak na standardy tej klasy, Subaru XV ma dość przestronne wnętrze. Zwłaszcza w porównaniu z konkurencyjnymi crossoverami. Tutaj od razu czuć tę zaletę, że samochód jest zbudowany na bazie samochodu osobowego. Lądowanie jest wygodniejsze, a wszystkie elementy sterujące są na wyciągnięcie ręki.
Wnętrze oczywiście nie jest tak eleganckie jak w Forsterze, ale jakość materiałów wykończeniowych również stoi na najwyższym poziomie. Panel przedni wykonany z miękkiego tworzywa sztucznego. Fotele, choć wydają się zwyczajne, w rzeczywistości bardzo wytrwale utrzymują kierowcę i pasażerów w zakrętach.
System audio, klimatyzacja, elektryczne szyby - wszystko to jest już „w bazie danych”. Ale bezkluczykowy dostęp do kabiny, przycisk uruchamiania silnika, skórzana tapicerka siedzeń, czujniki deszczu i światła, a także dwustrefowa klimatyzacja polegają tylko na najwyższej konfiguracji. W nim miejsce monochromatycznego wyświetlacza zajmie także wielofunkcyjny kolorowy, taki sam jak w Foresterze, z dynamicznym obrazem i podłączaną kamerą cofania.

Napęd na wszystkie koła
Subaru XV to tylko napęd na wszystkie koła. To prawda, że \u200b\u200bschemat „cztery na cztery” może być inny. Wszystko zależy od silnika i skrzyni biegów. Co dziwne, najbardziej terenowa wersja z silnikiem o pojemności 1,6 litra i manualną skrzynią biegów. Wyposażony jest w samoblokujący mechanizm różnicowy międzyosiowy oraz funkcję redukcji biegów. Jeśli więc planujesz mniej lub bardziej regularnie korzystać z prawdziwych kąpieli błotnych, lepiej zdecydować się na tę wersję.
Samochody z przekładnią CVT mają własny symetryczny układ napędu na wszystkie koła z aktywnym rozdziałem momentu obrotowego. Domyślnie 60% napędu trafia na przednie koła, a 40% na tylne. Ale dla lepszej przyczepności i lepszego prowadzenia, stosunek ten może zmieniać się niemal natychmiast i bardzo elastycznie. To jest właśnie powód poczucia pewności, jakie każdy kierowca zasiada za kierownicą Subaru.
Obowiązkowy dla wszystkich wersji XV jest system kontroli stabilności. Nawiasem mówiąc, we wszystkich konfiguracjach, z wyjątkiem najbardziej podstawowych, Subaru XV jest wyposażony w przednie boczne i kurtynowe poduszki powietrzne. W europejskich testach ten crossover otrzymał najwyższą ocenę - pięć gwiazdek. Co więcej, to właśnie ten samochód został nazwany „najbezpieczniejszym dla dzieci pasażerów”.
Subaru XV to naprawdę wszechstronna maszyna, która równie dobrze poradzi sobie z niemal każdym wyzwaniem, przed jakim stoją nasze pojazdy w naszym środowisku. Jest wygodny w mieście, szykowny na autostradzie i nie boi się umiarkowanego off-roadu.

Do tej pory istnieje wiele systemów napędu na wszystkie koła do samochodów. Rozważ dwie najczęstsze wersje na przykładzie samochodów Subaru, ponieważ niektóre z nich mają wspólną nazwę i oznaczenie. Istnieje kilka różnych wersji napędu na wszystkie koła Subaru AWD.
Wszystkie takie modele (z wyjątkiem coupe Subaru BRZ z napędem na tylne koła) mają standardowo symetryczny napęd na wszystkie koła AWD. Nazwa jest powszechna, ale stosowane są cztery jej modyfikacje układów napędu na wszystkie koła.
Standardowy układ napędu na wszystkie koła oparty na centralnym samoblokującym mechanizmie różnicowym i sprzęgle wiskotycznym (CDG)
Większość ludzi uważa, że \u200b\u200bta kategoria systemów jest związana z napędem na wszystkie koła. Jest to bardzo powszechne w samochodach podobnej marki z manualną skrzynią biegów. Ten model ma symetryczną konfigurację napędu na wszystkie koła, w normalnych warunkach moment obrotowy jest w stosunku przedniej i tylnej osi od 50 do 50.
Kiedy samochód się ślizga, mechanizm różnicowy, który znajduje się między osiami, jest w stanie przekazać do 80% momentu obrotowego na przednią oś, ta funkcja zapewnia dobrą przyczepność opon do jezdni. W takim mechanizmie różnicowym zastosowano sprzęgło wiskotyczne, dzięki któremu może reagować na mechaniczną różnicę przyczepności opony do drogi bez udziału komputera.
Możesz zobaczyć typ napędu na wszystkie koła cdg w Subaru Forester, który ma sześciobiegową skrzynię biegów.
Taki dysk jest używany od dawna, a pojawienie się nowej wersji w przyszłym roku świadczy tylko o tym, że szybko nie zniknie. Model jest niezawodnym i prostym układem napędu na wszystkie koła, który może zapewnić bardzo bezpieczną jazdę przy wykorzystaniu dostępnej przyczepności.
Należy zauważyć, że napęd na wszystkie koła typu cdg można zobaczyć w samochodach Subaru Impreza z 2014 roku z dwulitrowym silnikiem, a także w XV Crosstrek, który ma pięciobiegową manualną skrzynię biegów, w samochodach Ouback i Forester, które mają sześciobiegową skrzynię biegów.
Napęd na wszystkie koła ze zmiennym rozdziałem momentu obrotowego dla pojazdów z automatyczną skrzynią biegów (VTD)
Należy zauważyć, że Subaru rozpoczęło konwersję większości swoich pojazdów ze standardowej automatycznej skrzyni biegów na bezstopniową skrzynię biegów (CVT). Jednocześnie nadal można znaleźć samochody z takim systemem.
Symetryczny napęd na wszystkie koła, który wiąże się z wykorzystaniem zmiennej dystrybucji momentu obrotowego, można znaleźć w Tribeca (z silnikiem 3.6i i 6 cylindrami, a także 5-biegową skrzynią biegów), Outback i Legacy. Tutaj następuje przesunięcie momentu obrotowego w kierunku tylnej osi w proporcji 45 do 55. Zamiast centralnego dyferencjału ze sprzęgłem wiskotycznym zastosowane zostanie tu wielotarczowe sprzęgło hydrauliczne, które zostanie połączone z planetarnym dyferencjałem.
W przypadku wykrycia poślizgu wysyłane są sygnały z czujników zainstalowanych w celu pomiaru poślizgu kół, a także siły hamowania i położenia przepustnicy znajdujących się w pobliżu przepustnicy. W takim przypadku moment obrotowy zostanie rozłożony równomiernie wzdłuż osi (od 50 do 50), aby zapewnić maksymalną przyczepność kół do nawierzchni asfaltowej.
W pełni mechaniczne sprzęgło wiskotyczne jest znacznie prostsze i bardziej elastyczne. Układ VTD ma tę zaletę, że ma element aktywny, a nie bierny, dzięki czemu uzyskuje się dużą prędkość przenoszenia momentu obrotowego między osiami, czym nie może się pochwalić układ mechaniczny.
Napęd na wszystkie koła z aktywnym rozdziałem momentu obrotowego (ACT)
W nowszych modelach Subaru zastosowano już trzeci wariant napędu na wszystkie koła. W szczególności ma wiele podobieństw do poprzedniej wersji - zakłada również zastosowanie sterowanego elektronicznie układu wielotarczowego w przełożeniu 60 do 40 z przeniesieniem momentu obrotowego na przednią oś.

Akt z napędem na wszystkie koła jest stosowany w modelach Subaru Legacy 2014
Ponadto ten AWD ma aktywny rozkład momentu obrotowego o nazwie ACT. Dzięki oryginalnemu wielopłytkowemu sterowanemu elektronicznie sprzęgłu przenoszenia momentu obrotowego, rozkład momentu obrotowego pomiędzy osiami w czasie rzeczywistym odpowiada warunkom jazdy pojazdu.
Taki układ napędu na wszystkie koła pozwala zwiększyć zarówno stabilność, jak i wydajność maszyny. Napęd na wszystkie koła act jest stosowany w modelach Subaru XV Crosstrek, Legacy 2014, Outback 2014, WRX i WRX STI 2015.
Napęd na wszystkie koła z wielotrybowym centralnym mechanizmem różnicowym (DCCD)
Oprócz opisanych powyżej układów napędu na wszystkie koła, Subaru zastosowało inne warianty symetrycznego napędu na wszystkie koła, które nie są już używane. Ale ostatnim systemem, o którym dzisiaj wspomnimy, jest system używany w WRX STI.
Ten system wykorzystuje dwa środkowe mechanizmy różnicowe. Jeden jest sterowany elektronicznie i zapewnia komputerowi pokładowemu Subaru dobrą kontrolę nad rozdziałem momentu obrotowego między osie. Drugi to urządzenie mechaniczne, które może szybciej reagować na wpływy zewnętrzne niż jego elektroniczny „kolega”. Idealną korzyścią dla kierowcy jest wykorzystanie tego, co najlepsze w elektronicznym proaktywnym i mechanicznym reaktywnym „świecie”.
Ogólnie rzecz biorąc, te mechanizmy różnicowe w naturalny sposób wykorzystują swoje różnice - harmonijnie połączone przez przekładnię planetarną - ale kierowca może przesunąć system w kierunku dowolnego centralnego mechanizmu różnicowego za pomocą elektronicznego systemu sterowania Driver Controlled Center Differential (DCCD) - „Driver Controlled Center Mechanizm różnicowy".
Rozkład momentu obrotowego w systemach DCCD jest przesunięty w stosunku 41:59 w kierunku tylnej osi. Ten zorientowany na osiągi system napędu na wszystkie koła jest przeznaczony do poważnych wydarzeń sportowych.
Boczny rozkład momentu obrotowego
Do tej pory zorientowaliśmy się, jak nowoczesne Subaru rozdziela moment obrotowy między przednią i tylną oś, ale co z rozdziałem momentu obrotowego między kołami, między lewą i prawą stroną? Zarówno na przedniej, jak i tylnej osi zwykle znajduje się standardowy mechanizm różnicowy typu otwartego (tj. Niepodlegający blokadzie). Mocniejsze modele (takie jak modele WRX i Legacy 3.6R) są często wyposażone w mechanizm różnicowy o ograniczonym poślizgu na tylnej osi, aby poprawić przyczepność tylnego koła podczas pokonywania zakrętów.
WRX STI jest również wyposażony w mechanizm różnicowy o ograniczonym poślizgu na przedniej osi, aby zmaksymalizować przyczepność na wszystkie koła. Najnowsze WRX 2015 i WRX STI 2015 również wykorzystują układy dystrybucji momentu obrotowego oparte na hamulcach, które hamują wewnętrzne koło podczas pokonywania zakrętów, aby zapewnić przeniesienie mocy na zewnątrz podczas pokonywania zakrętów i zmniejszyć promień skrętu.
Obecnie w pojazdach konwencjonalnych stosowane są trzy rodzaje napędu: napęd na przednie koła (FWD), napęd na tylne koła (RWD) i napęd na wszystkie koła (4WD).
Już na początku swojej historii Subaru postawiło na napęd na wszystkie koła, który w tamtym czasie był używany tylko w samochodach specjalnych. W tym rozdziale wyjaśnimy zalety autorskiego układu napędu na wszystkie koła Subaru. Dla lepszego zrozumienia rozważ wpływ każdego rodzaju napędu na właściwości dynamiczne samochodu. Ponieważ te cechy w dużej mierze zależą od właściwości opon, które odpowiadają za połączenie samochodu z nawierzchnią drogi, należy najpierw zapoznać się z właściwościami opon.
Poza zapewnieniem komfortu jazdy poprzez amortyzację nierówności drogowych, opony spełniają jeszcze trzy inne ważne funkcje:
Ponieważ siły trakcji i hamowania nie mogą występować jednocześnie, na ilustracji po prawej stronie siła działająca na oponę jest reprezentowana przez dwie składowe. Są to dwie siły elementarne, których wielkość jest ograniczona ogólnymi właściwościami opony, co oznacza, że nie ma możliwości sterowania, jeśli opona wyczerpała zapas właściwości na przyspieszenie.
Wyobraź sobie samochód poruszający się po łuku. W tej sytuacji siła poprzeczna działa na wszystkie cztery opony, równoważąc siłę odśrodkową występującą podczas skręcania samochodu. I chociaż można kierować tylko przednimi kołami, na wszystkie cztery koła samochodu działają siły, które mają tendencję do wypychania go na zewnątrz, poza trajektorię zakrętu. Jeżeli prędkość pojazdu będzie nadal rosła, siła działająca na koła i zapewniająca zadaną trajektorię ruchu osiągnie swoją granicę, po której samochód zboczy z zadanej trajektorii. W takim przypadku, jeśli jedna z opon zostanie obciążona dodatnim lub ujemnym (hamującym) momentem obrotowym, osiągnie swoją granicę przyczepności przed pozostałymi oponami. W zależności od rodzaju napędu (FWD/RWD/4WD) zjawisko to może wpływać na zachowanie pojazdu w taki czy inny sposób.*
Charakterystyka opon w dużej mierze zależy od ich materiału i konstrukcji, a także od stanu nawierzchni. Ponadto wpływa na nie przyłożone obciążenie pionowe (im większe obciążenie opony, tym większą siłę w kontakcie z drogą może ona zrealizować). Opona jest w stanie utrzymać zadaną trajektorię tylko podczas rotacji. Jeśli koło jest całkowicie zablokowane, samochód staje się niekontrolowany.
- Siła odśrodkowa
- Reakcja boczna opony
- Maksymalna siła przyczepności
- Siła pociągowa
- Docelowa trajektoria
* Na zachowanie samochodu ma wpływ nie tylko rodzaj układu napędowego. Większość pojazdów, niezależnie od rodzaju napędu, ze względów bezpieczeństwa zaprojektowano z niewielką podsterownością na normalnych, suchych drogach. Najbardziej oczywiste cechy zachowania w zależności od rodzaju jazdy przejawiają się w trybach ograniczających lub na śliskiej nawierzchni.
Napęd na przednie koła
Napęd tylny
Napęd na cztery koła
Stały napęd na cztery koła Subaru - Symetryczny AWD
Zalety
- Wysoka stabilność: moment obrotowy rozkłada się na wszystkie cztery koła, dzięki czemu zachowane jest bezpieczne zachowanie nawet na nierównych powierzchniach.
- Wysoka flotacja: doskonałą trakcję w każdych warunkach zapewnia dostarczanie momentu obrotowego na wszystkie cztery koła.
- Łatwość prowadzenia: tendencja do podsterowności lub nadsterowności jest przezwyciężona nawet w ekstremalnych warunkach.
- Dobra dynamika przyspieszenia: moment obrotowy przekazywany jest na wszystkie cztery koła, dzięki czemu schemat ten doskonale łączy się z silnikami o dużej mocy.
Wady tradycyjnego napędu na wszystkie koła, które eliminuje symetryczny napęd na wszystkie koła Subaru
- Duża masa, wysokie zużycie paliwa... Elementy napędu na wszystkie koła mogą być proste i lekkie dzięki podłużnemu rozmieszczeniu silnika i skrzyni biegów.
- Przeciętne prowadzenie... Dzięki zaletom konstrukcyjnym napęd na wszystkie koła nie przeszkadza modelom Subaru w demonstrowaniu wyrafinowanego prowadzenia.
Napęd na przednie koła FWD
Zalety
- Możliwość uzyskania bardziej przestronnego wnętrza, ponieważ pod dnem nie ma wału kardana. (Ale konieczne jest zapewnienie wystarczającej sztywności nadwozia, dlatego wiele modeli z napędem na przednie koła ma tunel podłogowy).
- Wysoka stabilność jazdy: Ponieważ przednie koła ciągną pojazd, stale działające siły uciągu przedniego koła zwiększają jego stabilność podczas jazdy z dużą prędkością.
- Łatwość prowadzenia: samochód z napędem na przednie koła ma tendencję do podsterowności w ekstremalnych warunkach. Po zwolnieniu pedału przyspieszenia i zmniejszeniu siły pociągowej czułość sterowania zostaje przywrócona wraz z powrotem do zadanej trajektorii.
- Doskonała oszczędność paliwa: Układ napędu na przednie koła zapewnia krótką ścieżkę przenoszenia momentu obrotowego i wysoką wydajność.
Wady
- Gorsza reakcja układu kierowniczego: Ponieważ zarówno przyczepność, jak i kierowanie są realizowane tylko przez przednie koła, w ekstremalnych warunkach jazdy występuje mniej wyraźna reakcja na kierowanie i tendencja do podsterowności.
- Przy intensywnym przyspieszaniu samochodu z mocnym silnikiem obciążenie rozkłada się na tylne koła, przez co przednie opony nie mogą w pełni wykorzystać swojego potencjału. Napęd na przednie koła nie usprawiedliwia się w samochodach z mocnym silnikiem.
Podsterowność
- Siła odśrodkowa
- Reakcja boczna opony
- Maksymalna siła przyczepności
- Siła pociągowa
- Docelowa trajektoria
Napęd na tylne koła RWD
Zalety
- Ostre prowadzenie: przednie koła pełnią tylko funkcję kierowania. Silnik z przodu i napęd na tylne koła zapewniają dobre rozłożenie masy na koła.
- Mniejszy promień skrętu: brak napędu na przednie koła pozwala na większy kąt skrętu.
- Dobre przyspieszenie na suchej nawierzchni: podczas przyspieszania masa jest przenoszona na tylne koła, przyczyniając się do uzyskania większej przyczepności.
Wady
- Mniejsza pojemność przedziału pasażerskiego i bagażnika: nieporęczny napęd na tylne koła (wał kardana, główne koło zębate) znajduje się pod dolną częścią nadwozia.
- Większa masa własna: Pojazdy z napędem na tylne koła mają więcej komponentów i zespołów w porównaniu z pojazdami z napędem na przednie koła.
- W ekstremalnych warunkach samochody te wykazują tendencję do nadsterowności, co utrudnia jazdę z napędem na przednie koła.
W przypadku modeli sportowych jest to bardziej zaleta niż wada, ponieważ dodaje dreszczyku emocji.
Nadsterowność
- Siła odśrodkowa
- Reakcja boczna opony
- Maksymalna siła przyczepności
- Siła pociągowa
- Docelowa trajektoria
Napęd na wszystkie koła 4WD
Zalety
- Wysoka stabilność: moment obrotowy przekazywany jest na wszystkie cztery koła, dzięki czemu zachowane jest bezpieczne zachowanie nawet na nierównej nawierzchni.
- Wysoka zdolność do jazdy w terenie: możliwości wdrożenia trakcji są znacznie szersze niż w przypadku schematu monodrive.
- Łatwość obsługi: pojazdy z napędem na cztery koła skręcają bliżej biegu jałowego.
- Dobra dynamika przyspieszenia: moment obrotowy przekazywany jest na wszystkie cztery koła, dzięki czemu napęd na cztery koła bardzo dobrze łączy się z silnikami o dużej mocy.
Wady
- Mniejsza pojemność przedziału pasażerskiego i bagażnika: nieporęczny napęd na przednie i tylne koła (wał kardana, przekładnia główna umieszczona pod dolną częścią nadwozia).
- Duża masa własna dzięki większej liczbie części, zespołów i zespołów.
- Zwiększone zużycie paliwa związane z większą masą i obecnością dodatkowych obracających się części.
- Gorsza reakcja na sterowanie ze względu na krążenie mocy, a także ze względu na fakt, że koła kierowane są obciążone momentem obrotowym jako napędzające.
Układ kierowniczy zbliżony do neutralnego
- Siła odśrodkowa
- Reakcja boczna opony
- Maksymalna siła przyczepności
- Siła pociągowa
- Docelowa trajektoria
Bezpieczeństwo
Niezawodny chwyt
Główną różnicą w napędzie symetrycznym jest taka sama długość prawej i lewej półosi, co ułatwia zapewnienie odpowiedniego skoku zawieszenia przy wyraźnym śledzeniu profilu drogi. W rezultacie samochód niezawodnie „trzyma się” drogi, koła wydają się kleić do nawierzchni.
Wysoka stabilność
Jak już wspomniano, połączenie silnika bokser Subaru i symetrycznego napędu zapewnia doskonałą stabilność i prowadzenie. Napęd na wszystkie koła gwarantuje dodatkową przewagę nad konkurencją podczas jazdy w terenie.
Radość z jazdy
Gospodarka
Z reguły pojazdy z napędem na wszystkie koła charakteryzują się większą masą i gorszym prowadzeniem, co ostatecznie prowadzi do zwiększonego zużycia paliwa. Symetryczny napęd na wszystkie koła dzięki swoim zaletom konstrukcyjnym nie wymaga stosowania zbędnych podzespołów. W przypadku niektórych modeli Subaru zużycie paliwa jest porównywalne z modelami z napędem jednokierunkowym tej samej klasy innych producentów.
Wyrafinowana obsługa
Dzięki wzdłużnie zamontowanemu silnikowi typu bokser i symetrycznemu napędowi samochody Subaru charakteryzują się dopracowanymi właściwościami jezdnymi. Charakteryzują się zdolnościami terenowymi modeli z napędem na wszystkie koła, a pod względem szybkości reakcji przewyższają konwencjonalne modele z napędem na jedną oś.
Stabilność i przyczepność
Efektywność napędu na wszystkie koła zależy od koncepcji pojazdu. Im bardziej aktywny rozkład momentu obrotowego na koła, tym wyższa zdolność do jazdy w terenie, jednak najczęściej ze szkodą dla sterowności.
W przypadku modeli Subaru, z szybką reakcją i wysoką wydajnością napędu na wszystkie koła, moment obrotowy może być aktywnie przekazywany na koła, przy jednoczesnym zachowaniu dobrej stabilności i wysokiej zdolności przełajowej na różnych rodzajach dróg bez uszczerbku dla oszczędności paliwa i prowadzenia.
Łatwo dostrzec różnicę między pojazdami 4x4 z napędem na 2 koła a doskonałym układem Subaru zbudowanym od podstaw.
Pojazd z napędem na wszystkie koła i wolnym centralnym mechanizmem różnicowym zatrzymuje się, gdy jedno z kół się ślizga. Aby tego uniknąć, stosuje się mechanizm blokujący.
Jednak działanie takiego mechanizmu może niekorzystnie wpływać na prowadzenie pojazdu. Tak więc podczas jazdy po suchym asfalcie z zablokowanym mechanizmem różnicowym dochodzi do krążenia mocy, powodując szarpnięcia i utrudniając skręcanie. Dlatego na suchej nawierzchni należy odblokować mechanizm różnicowy, a na trudnych terenach o słabej przyczepności zablokować go. Stały napęd na wszystkie koła może automatycznie blokować i odblokowywać mechanizm różnicowy w zależności od warunków jazdy.
To rozwiązanie jest konieczne, aby zapobiec szarpnięciom, gdy zamek jest włączony. Ponadto wymagana jest lepsza kontrola w obliczu gwałtownej zmiany warunków drogowych. Wtedy liczy się doświadczenie i wiedza techniczna z zakresu zarządzania układem napędu na cztery koła!
centralny mechanizm różnicowy
Centralny mechanizm różnicowy odblokowany
Centralny mechanizm różnicowy zablokowany
- Potencjalna siła pociągowa przenoszona przez koło
- Siła pociągowa zużyta na straty wewnętrzne
- Rzeczywista siła pociągowa przenoszona przez koło
Kontrolowalność
Wielomodowy aktywny centralny mechanizm różnicowy
Wielostopniowy tryb ręczny i trzy automatyczne tryby sterowania systemu DCCD zapewniają wybór jednego z dwóch rodzajów centralnej blokady mechanizmu różnicowego. Zapewnia to idealną równowagę między doskonałą trakcją i zwinnością w każdych warunkach drogowych. Podstawowa proporcja rozdziału momentu obrotowego pomiędzy przednie i tylne koła to 41% / 59%. Redystrybucję momentu obrotowego zapewnia sterowanie wielopłytkowym elektromagnetycznym sprzęgłem przenoszącym moment obrotowy oraz mechanicznym samoblokującym mechanizmem różnicowym.
Wielomodowy dynamiczny system stabilizacji
System kontroli dynamiki pojazdu
Standardowo we wszystkich modelach Subaru, dynamiczna kontrola stabilności monitoruje za pomocą wielu czujników, czy zachowanie samochodu jest zgodne z intencjami kierowcy. Jeśli pojazd zbliża się do stanu wyboczenia, system rozdziału momentu obrotowego, silnik i tryby hamowania każdego koła są dostosowywane, aby utrzymać z góry określoną trajektorię pojazdu.
Stabilność manewru
Podczas pokonywania zakrętów lub manewrowania wokół nagłych przeszkód, dynamiczna kontrola stabilności porównuje intencje kierowcy z rzeczywistym zachowaniem pojazdu. To porównanie opiera się na sygnałach z czujnika kąta skrętu kierownicy, czujnika nacisku pedału hamulca oraz czujnika przyspieszenia poprzecznego i odchylenia kierunkowego.
Następnie system dostosowuje moc wyjściową silnika i tryby hamowania każdego koła, aby utrzymać pojazd na torze.
Symetryczne systemy napędu na wszystkie koła Subaru
Napęd na wszystkie koła VTD *1:
Sportowa wersja elektronicznie sterowanego napędu na wszystkie koła, poprawiająca właściwości pokonywania zakrętów. Kompaktowy układ napędu na wszystkie koła obejmuje planetarny centralny mechanizm różnicowy i elektronicznie sterowane wielopłytkowe sprzęgło hydrauliczne z blokadą*2. Rozdział momentu obrotowego między przednie i tylne koła w stosunku 45:55 jest regulowany w sposób ciągły przez blokadę mechanizmu różnicowego za pomocą sprzęgła wielopłytkowego. Dystrybucja momentu obrotowego jest kontrolowana automatycznie, z uwzględnieniem stanu nawierzchni drogi. Zapewnia to doskonałą stabilność, a dzięki dystrybucji momentu obrotowego z naciskiem na tylne koła poprawia się charakterystyka kierowania.
Subaru WRX ze skrzynią Lineartronic.
Wcześniej montowane w autach: Subaru Legacy GT 2010-2013, Forester S-Edition 2011-2013, Outback 3.6 2010-2014, Tribeca, WRX STI z automatyczną skrzynią biegów 2011-2012
Napęd na wszystkie koła z aktywnym rozdziałem momentu obrotowego (ACT):
Elektronicznie sterowany układ napędu na wszystkie koła, który zapewnia większą stabilność kierunkową pojazdu na drodze w porównaniu z pojazdami z napędem na jedną oś i pojazdami z napędem na wszystkie koła z napędem plug-in na inną oś.
Oryginalne sprzęgło wielotarczowe Subaru dostosowuje rozdział momentu obrotowego przód-tył w czasie rzeczywistym w zależności od warunków jazdy. Algorytm sterowania jest wbudowany w elektroniczną jednostkę sterującą skrzynią biegów i uwzględnia prędkość obrotową przedniego i tylnego koła, aktualny moment obrotowy na wale korbowym silnika, aktualne przełożenie w skrzyni biegów, kąt skrętu kierownicy itp. i za pomocą bloku hydraulicznego ściska tarcze sprzęgła z niezbędną siłą. W idealnych warunkach system rozdziela moment obrotowy między przednie i tylne koła w stosunku 60:40. W zależności od okoliczności, takich jak poślizg, ostre zakręty itp., zmienia się redystrybucja momentu obrotowego między osiami. Dostosowanie algorytmu sterowania do aktualnych warunków jazdy zapewnia doskonałe prowadzenie w każdej sytuacji drogowej, niezależnie od poziomu wyszkolenia kierowcy. Sprzęgło wielopłytkowe znajduje się w korpusie zespołu napędowego, jest jego integralną częścią i wykorzystuje ten sam płyn roboczy co inne elementy automatycznej skrzyni biegów, co prowadzi do jego lepszego chłodzenia niż w oddzielnym miejscu, jak większość producentów, oraz dzięki temu większa trwałość.
Obecne modele (specyfikacja rosyjska)
Na rynku rosyjskim Subaru Outback, Subaru Legacy, Subaru Forester*, Subaru XV.
* W przypadku modyfikacji ze skrzynią Lineartronic.
Napęd na wszystkie koła z centralnym samoblokującym mechanizmem różnicowym ze sprzęgłem wiskotycznym (CDG):
Mechaniczny układ napędu na wszystkie koła do przekładni mechanicznych. System jest połączeniem centralnego mechanizmu różnicowego ze stożkowymi kołami zębatymi i blokady opartej na sprzęgle wiskotycznym. W normalnych warunkach moment obrotowy między przednimi i tylnymi kołami rozkłada się w stosunku 50:50. System zapewnia bezpieczną, sportową jazdę poprzez maksymalne wykorzystanie dostępnej przyczepności.
Obecne modele (specyfikacja rosyjska)
Subaru WRX i Subaru Forester - z manualną skrzynią biegów.
Napęd na wszystkie koła z elektronicznie sterowanym aktywnym centralnym mechanizmem różnicowym o ograniczonym poślizgu (DCCD *3):
Zorientowany na osiągi napęd na wszystkie koła do poważnych wydarzeń sportowych. Napęd na wszystkie koła z elektronicznie sterowanym aktywnym centralnym mechanizmem różnicowym o ograniczonym poślizgu wykorzystuje kombinację mechanicznych i elektronicznych blokad mechanizmu różnicowego podczas zmiany momentu obrotowego. Moment obrotowy jest rozdzielany między przednie i tylne koła w stosunku 41:59, z naciskiem na maksymalne osiągi i optymalną kontrolę stabilności dynamicznej pojazdu. Blokada mechaniczna ma szybszą reakcję i działa przed blokadą elektroniczną. Pracując z wysokim momentem obrotowym, system wykazuje najlepszą równowagę między ostrością kontroli a stabilnością. Istnieją wstępnie ustawione tryby sterowania blokadą mechanizmu różnicowego, a także tryb sterowania ręcznego, z którego kierowca może korzystać w zależności od sytuacji na drodze.
Obecne modele (specyfikacja rosyjska)
Subaru WRX STI z manualną skrzynią biegów.
*1 VTD: zmienny rozkład momentu obrotowego.
*2 Kontrolowany mechanizm różnicowy o ograniczonym poślizgu.
*3 DCCD: aktywny centralny mechanizm różnicowy.






