最新の電子技術における電気モーターの速度の調整は、以前のように電源電圧を変更することではなく、異なる持続時間の電流パルスを電気モーターに供給することによって行われます。 最近非常に普及している PWM は、これらの目的で使用されます ( パルス幅変調)レギュレーター。 この回路は汎用的で、エンジン速度、ランプの明るさ、充電器の電流も制御します。
PWMレギュレータ回路
上の図はうまく機能します。
![]()
回路を変更せずに、電圧を 16 ボルトまで上げることができます。 負荷電力に応じてトランジスタを配置してください。
![]()
![]()
組み立て可能 PWMレギュレータそして、この電気回路によると、従来のバイポーラトランジスタでは次のようになります。
![]()
必要に応じて、複合トランジスタ KT827 の代わりに、抵抗 R1 - 47k を備えた電界効果 IRFZ44N を取り付けます。 ラジエーターのない Polevik は、最大 7 アンペアの負荷では発熱しません。
![]()
![]()
PWMコントローラーの動作
NE555 チップ上のタイマーは、THR ピンから切り離されたコンデンサ C1 の電圧を監視します。 最大値に達するとすぐに、内部トランジスタが開きます。 これにより、DIS ピンがグランドに短絡されます。 この場合、論理 0 が OUT 出力に表示されます。 コンデンサは DIS を通じて放電を開始し、コンデンサの電圧がゼロになると、システムは逆の状態に切り替わります。出力 1 では、トランジスタが閉じられます。 コンデンサは再び充電を開始し、すべてが再び繰り返されます。
コンデンサC1の充電は「R2→上アームR1→D2」の経路で行われ、放電は「D1→下アームR1→DIS」の経路で行われます。 可変抵抗器 R1 を回転させると、上アームと下アームの抵抗比が変化します。 したがって、パルス長と休止の比率が変化します。 周波数は主にコンデンサ C1 によって設定され、抵抗 R1 の値にもわずかに依存します。 充電/放電抵抗比を変更することで、デューティ サイクルを変更します。 抵抗 R3 により出力が確実にハイレベルに引き上げられるため、オープンコレクタ出力が得られます。 独立して高いレベルを設定することはできません。
図とほぼ同じ値のダイオードやコンデンサを使用できます。 1 桁以内の偏差はデバイスの動作に大きな影響を与えません。 たとえば、C1 に 4.7 ナノファラッドを設定すると、周波数は 18 kHz まで低下しますが、ほとんど聞こえなくなります。
回路を組み立てた後、主要な制御トランジスタが熱くなる場合は、完全に開いていない可能性があります。 つまり、トランジスタの両端に大きな電圧降下があり(部分的にオープン)、電流が流れます。 その結果、暖房のために多くの電力が消費されます。 回路の出力に大きなコンデンサを並列接続することをお勧めします。そうしないと、シングして安定化が不十分になります。 口笛を避けるには、C1 を選択してください。口笛が頻繁に発生します。 一般に、応用範囲は非常に広く、高出力 LED ランプ、LED ストリップ、スポットライトの輝度調整器としての使用が特に有望ですが、それについては次回詳しく説明します。 この記事は、ear、ur5rnp、stalker68 の協力を得て書かれました。
幅広い用途に使用できるもう 1 つの電子デバイス。
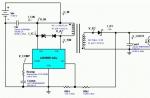
スムーズな手動制御を備えた強力なPWM(PWM)コントローラーです。 10 ~ 50 V の定電圧で動作し (12 ~ 40 V の範囲を超えないようにすることをお勧めします)、最大消費電流が 10 であり、さまざまな消費者 (ランプ、LED、モーター、ヒーター) の電力を調整するのに適しています。 40A。
標準的なパッド入り封筒で発送 

ケースは壊れやすいラッチで固定されているため、慎重に開けてください。 
基板内部と取り外したレギュレーターノブ 
プリント基板は両面グラスファイバー製で、はんだ付けや取り付けは丁寧です。 強力な端子台による接続。 

ケース内の換気スロットは効果がありません。 プリント基板でほぼ完全に覆われています。 
組み立てるとこんな感じ 
実際の寸法は記載よりわずかに大きくなります: 123x55x40mm
装置の概略図 
宣言された PWM 周波数は 12kHz です。 出力電力を調整すると、実際の周波数は 12 ~ 13kHz の範囲で変化します。
必要に応じて、必要なコンデンサを C5 (初期容量 1nF) と並列にはんだ付けすることにより、PWM 動作周波数を下げることができます。 頻度を増やすことはお勧めできません。 スイッチング損失が増加します。
可変抵抗器の左端にスイッチが内蔵されており、デバイスの電源をオフにすることができます。 ボード上にはレギュレータが動作しているときに点灯する赤色 LED もあります。
何らかの理由で、PWM コントローラー チップ上のマークは注意深く消去されていますが、これが NE555 の類似品であることは簡単に推測できます :)
規制範囲は規定の 5 ~ 100% に近い
要素 CW1 はダイオード本体の電流安定化装置のように見えますが、正確にはわかりません...
ほとんどの電力レギュレータと同様に、調整は負の導体を介して実行されます。 短絡保護はありません。
MOSFET とダイオード アセンブリには最初はマーキングがなく、サーマル ペーストで個々のラジエーターに配置されています。
レギュレータは誘導負荷でも動作できます。 出力には保護ショットキー ダイオードのアセンブリがあり、自己誘導 EMF を抑制します。
20A の電流でテストしたところ、ラジエーターがわずかに発熱し、おそらく最大 30A までの電流が流れる可能性があることがわかりました。 現場作業員のオープンチャネルの合計抵抗を測定すると、わずか 0.002 オーム (20A の電流で 0.04V 降下) です。
PWM 周波数を下げると、宣言された 40A をすべて引き出すことになります。 ごめんなさい、確認できません…
自分で結論を導き出すことができます。私はこのデバイスが気に入りました:)
+56を買う予定です お気に入りに追加 レビューが気に入りました +38 +85ぎくしゃくした動きやパワーサージのないスムーズなエンジン動作が耐久性の鍵です。 これらのインジケーターを制御するには、220V、12V、24V の電気モーター速度コントローラーが使用されます。これらの周波数はすべて自分の手で作ることも、既製のユニットを購入することもできます。
なぜスピードコントローラーが必要なのでしょうか?
エンジン速度コントローラー、つまり周波数コンバーターは、電圧を反転し、PWM を使用して非同期モーターのスムーズな停止と始動を保証するために必要な強力なトランジスタを備えたデバイスです。 PWM – 電気デバイスのワイドパルス制御。 交流および直流の特定の正弦波を作成するために使用されます。
写真 - 非同期モーター用の強力なレギュレーターコンバータの最も単純な例は、従来の電圧安定化装置です。 しかし、議論されているデバイスは、はるかに広い範囲の動作と電力を備えています。
周波数変換器は、電気エネルギーを動力源とするあらゆるデバイスで使用されます。 ガバナーは非常に正確な電気モーター制御を提供するため、エンジン速度を上下に調整し、回転数を必要なレベルに維持し、突然の回転から計器を保護します。 この場合、電気モーターはフルパワーで動作するのではなく、動作に必要なエネルギーのみを使用します。
 写真 – DC モータースピードコントローラー
写真 – DC モータースピードコントローラー 非同期電動モーターにスピードコントローラーが必要な理由:
- エネルギーを節約するため。 モーターの速度、始動と停止の滑らかさ、強さと速度を制御することで、個人資金を大幅に節約できます。 たとえば、速度を 20% 下げると、エネルギーを 50% 節約できます。
- 周波数変換器は、別個のコントローラーを使用せずに、プロセスの温度、圧力を制御するために使用できます。
- ソフトスタートのために追加のコントローラーは必要ありません。
- メンテナンスコストが大幅に削減されます。
この装置は、溶接機(主に半自動機)、電気ストーブ、各種家庭用電化製品(掃除機、ミシン、ラジオ、洗濯機)、家庭用ヒーター、各種船舶模型などによく使用されます。
スピードコントローラーの動作原理
スピード コントローラーは、次の 3 つの主要なサブシステムで構成されるデバイスです。
- ACモーター。
- メインドライブコントローラー;
- ドライブと追加パーツ。
AC モーターがフルパワーで始動すると、負荷のフルパワーで電流が伝達され、これが 7 ~ 8 回繰り返されます。 この電流によりモーターの巻線が曲げられ、発熱が長時間発生します。 これにより、エンジンの寿命が大幅に短縮される可能性があります。 換言すれば、このコンバータは、二重のエネルギー変換を提供する一種のステップインバータです。
 写真 - 整流子モーター用レギュレーターの図
写真 - 整流子モーター用レギュレーターの図 入力電圧に応じて、三相または単相電気モーターの速度の周波数調整器は、220 ボルトまたは 380 ボルトの電流を整流します。 この動作は、エネルギー入力に配置された整流ダイオードを使用して実行されます。 次に、コンデンサを使用して電流をフィルタリングします。 次に、PWM が生成されます。これは電気回路が担当します。 これで、誘導モーターの巻線がパルス信号を送信し、パルス信号を目的の正弦波に統合する準備が整いました。 マイクロ電気モーターを使用する場合でも、これらの信号は文字通りバッチで発行されます。
 写真 - 電気モーターの通常動作の正弦波
写真 - 電気モーターの通常動作の正弦波 レギュレーターの選び方
車、機械の電気モーター、または家庭のニーズに合わせてスピード コントローラーを選択する必要があるいくつかの特性があります。
- コントロールタイプ。 整流子モーターの場合、ベクトルまたはスカラー制御システムを備えたレギュレーターがあります。 前者はより頻繁に使用されますが、後者はより信頼できると考えられています。
- 力。 これは、電気周波数変換器を選択する際の最も重要な要素の 1 つです。 保護されるデバイスの最大許容値に対応する電力を備えた周波数発生器を選択する必要があります。 ただし、低電圧モーターの場合は、許容ワット値よりも強力なレギュレーターを選択することをお勧めします。
- 電圧。 当然のことながら、ここでのすべては個別のものですが、可能であれば、回路図の許容電圧の範囲が広い電気モーター用のスピードコントローラーを購入する必要があります。
- 周波数範囲。 このデバイスの主な役割は周波数変換であるため、ニーズに最も適したモデルを選択するようにしてください。 たとえば、手動ルーターの場合は 1000 ヘルツで十分です。
- 他の特徴によると。 保証期間、入力数、サイズ(卓上機、ハンドツールには専用アタッチメントあり)です。
同時に、いわゆるユニバーサル回転レギュレーターがあることも理解する必要があります。 ブラシレスモーター用の周波数変換器です。
 写真 – ブラシレスモーター用レギュレーターの図
写真 – ブラシレスモーター用レギュレーターの図 この回路には 2 つの部分があります。1 つは論理的な部分で、チップ上にマイクロコントローラーが配置されています。もう 1 つは電源です。 基本的に、このような電気回路は強力な電気モーターに使用されます。
ビデオ: SHIRO V2 を使用した電動モーター スピード コントローラー
自作エンジンスピードコントローラーの作り方
簡単なトライアックモーター速度コントローラーを作成できます。その図は以下に示されており、価格は電気店で販売されている部品のみで構成されています。
動作させるには、無線工学雑誌で推奨されている BT138-600 タイプの強力なトライアックが必要です。
 写真 - DIY スピード コントローラーの図
写真 - DIY スピード コントローラーの図 説明した回路では、速度はポテンショメータ P1 を使用して調整されます。 パラメータ P1 は入力パルス信号の位相を決定し、これによりトライアックが開きます。 このスキームは、畑作と家庭の両方で使用できます。 ミシン、ファン、卓上ボール盤などに使用できるレギュレーターです。
動作原理は単純です。モーターが少し減速すると、そのインダクタンスが低下し、これにより R2-P1 および C3 の電圧が増加し、トライアックの開度が長くなります。
サイリスタ フィードバック レギュレータの動作は少し異なります。 エネルギーがエネルギー システムに戻ることができるため、非常に経済的で有益です。 この電子デバイスには、電気回路に強力なサイリスタが組み込まれています。 彼の図は次のようになります。

ここで、直流電流を供給し、整流するために、制御信号発生器、アンプ、サイリスタ、速度安定化回路が必要となります。