Современные цифровые технологии позволяют применять широкий ряд управляющих функций в автомобиле. Много параметров, влияющих на его работу, могут приниматься во внимание одновременно, так что управление различными системами может осуществляться с максимальной эффективностью. Электронный блок управления (ЭБУ) получает электрические сигналы от датчиков или от генераторов в ожидаемом интервале значений, оценивает их и затем проводит вычисление пусковых сигналов для исполнительных устройств (приводов). Программа управления хранится в специальной памяти, а за реализацию этой программы отвечает микропроцессор.
Рис.57 Электронный блок управления. 1 - разъем, 2 - задающие каскады малой мощности, 3 - импульсный источник питания (SMPS), 4 - CAN интерфейс (интерфейс шины передачи данных), 5 - блок памяти микропроцессора, 6 - задающие каскады большой мощности, 7 - входные и выходные контуры.
Эксплуатационные условия
К ЭБУ предъявляются очень высокие требования по отношению к следующим факторам:
- температуре окружающей среды (во время нормальной работы должны находиться в пределах -40 - +85°С для коммерческих автомобилей и -40 - +70°С для легковых автомобилей);
- к воздействию со стороны таких материалов, как масло и топливо и т.п;
- к воздействию к влажности окружающей среды;
- обладать механической прочностью, например, при наличии вибраций при работе двигателя.
Одновременно очень высокие требования касаются электромагнитной совместимости и защиты от высокочастотных помех.
Устройство и конструкция
ЭБУ (рис. 57) размещается в металлическом корпусе и соединяется с датчиками, исполнительными устройствами и источником питания через многоштырьковый разъем (1). Компоненты электронной системы для непосредственного управления исполнительными устройствами располагаются в корпусе ЭБУ таким образом, чтобы обеспечить хорошее рассеяние тепла в окружающую среду.
Если ЭБУ устанавливается непосредственно на двигателе, то отвод тепла осуществляется через встроенный в корпус ЭБУ охладитель, в котором постоянно течет топливо (только для коммерческих автомобилей). Большинство компонентов ЭБУ выполняется по технологии SMD (Surface-Mounted Device - платы с поверхностным монтажом). Обычная проводка используется только в некоторых элементах питания и в разъемах, так что здесь могут быть применены компактные конструкции небольшой массы.
 Рис.58 Обработка сигналов в электронном блоке управления ЭБУ. Н - высокий уровень L - низкий уровень. FEPROM - программируемая память (постоянное запоминающие устройство), EEPROM - постоянная память, RAM - оперативная память, А/D-АЦП, CAN - шина передачи данных.
Рис.58 Обработка сигналов в электронном блоке управления ЭБУ. Н - высокий уровень L - низкий уровень. FEPROM - программируемая память (постоянное запоминающие устройство), EEPROM - постоянная память, RAM - оперативная память, А/D-АЦП, CAN - шина передачи данных.
Обработка данных
Входные сигналы
Наряду с периферийными исполнительными устройствами, датчики представляют интерфейс между автомобилем и ЭБУ, который является блоком обработки данных.
ЭБУ получает электрические сигналы от датчиков по проводке автомобиля и через разъемы. Эти сигналы могут быть следующих типов:

Рис.59 Сигналы широтно-импульсной модуляции. а - постоянный период, b - длительность сигнала.
Формирование сигналов
Для ограничения напряжения входных сигналов до максимально допустимого значения в ЭБУ используются защитные цепи. Путем применения устройств фильтрации наложенные сигналы помех в большинстве случаев отделяются от полезных сигналов, которые, в случае необходимости, затем усиливаются до допустимого уровня входного сигнала ЭБУ.
Формирование сигналов в датчиках может быть полным или частичным, в зависимости от уровня их интегрированности.
Обработка сигналов
ЭБУ является управляющим центром системы, являющимся ответственным за последовательность функциональных операций. Управляющие функции с учетом и без учета обратной связи выполняются в микропроцессоре. Входные сигналы, формируемые датчиками, генераторами с ожидаемыми значениями параметров и интерфейсами других систем, служат как входные координаты. Они подвергаются дальнейшей проверке на достоверность в компьютере. Выходные сигналы рассчитываются с использованием программ, характеристик и программируемых матриц. Микропроцессор синхронизируется кварцевым генератором.
 Рис.60 Схема расчета подачи топлива в электронном блоке управления.
Рис.60 Схема расчета подачи топлива в электронном блоке управления.
Ключ “зажигания” в положении А (пуск),
Ключ “зажигания” в положении В (режимы движения).
- Программируемая (перезаписываемая память). Для своей работы микропроцессору требуется программа, которая хранится в программируемой памяти (постоянное запоминающие устройство - ROM, или EPROM/ FEPROM).
Эта память также содержит также специальные данные (индивидуальные данные, характеристические и программируемые матрицы). Это фиксированные данные, которые не могут быть изменены во время управления автомобилем.
Множество вариантов, которые требуют различной записи данных, делают необходимым ограничение числа типов ЭБУ для изготовителей автомобилей. Вся область программируемой памяти (Flash EPROPM, или FEPROM) может быть запрограммирована (программа и специальные данные модели), когда автомобиль сходит с конвейера (EoL- End of Line programming - программирование на линии конвейера). Можно также сохранять в памяти число вариантов данных (то есть для разных стран), которые затем выбираются EoL-программированием.
- Оперативная память. Оперативная память (RAM) требуется для хранения таких изменяющихся данных, как численные значения сигналов. Для правильной работы оперативная память требует постоянного электрического питания. При выключении зажигания или выключателя пуска ЭБУ выключается и, следовательно, теряет всю память (так называемая “испаряющаяся” память). Адаптирующие значения величин, то есть тех, которые “обучаются” системой во время работы и которые касаются работы двигателя рабочих режимов, в этом случае должны быть снова “обучены” после нового включения ЭБУ.
Данные, которые не должны быть потеряны (например, коды иммобилайзера и данные кодов неисправности) должны постоянно храниться в постоянной памяти (EEPROM). В этом случае данные в постоянной памяти не теряются даже в случае отсоединения аккумуляторной батареи.
- Специализированная интегральная схема (ASIC). Увеличивающаяся сложность функций ЭБУ означает, что вычислительные возможности микропроцессоров оказываются недостаточными. Решением является использование модулей со специализированными интегральными схемами (ASIC - Application- Specific integrated Circuit) - потенциалом развития ЭБУ и, поскольку они оснащаются повышенной оперативной памятью (extra RAM) и усовершенствованными входными и выходными блоками, то могут генерировать и передавать сигналы широтноимпульсной модуляции.
- Блок текущего контроля. ЭБУ оснащается следящим контуром, который встроен в специализированную интегральную схему (ASIC). Микропроцессор и блок текущего контроля следят друг за другом и, как только обнаруживается неисправность, любой из них может выключить подачу топлива независимо от другого.
Выходные сигналы
Используя свои выходные сигналы, микропроцессор запускает задающие каскады. Выходные сигналы обычно являются достаточно мощными, чтобы непосредственно управлять исполнительными устройствами или реле. Задающие каскады защищены от короткого замыкания на массу или аккумуляторную батарею, а также от разрушения от электрической перегрузки. Такие нарушения в работе, вместе с обрывами цепи или неисправностями датчиков, определяются контроллером задающих каскадов, и эта информация передается в микропроцессор.
Переключающие сигналы
Эти сигналы используются для включения и выключения исполнительных устройств, например, электровентилятора системы охлаждения двигателя.
Сигналы широтно-импульсной модуляции (PWM signals)
Выходные цифровые сигналы могут быть в форме сигналов широтно-импульсной модуляции. Это прямоугольные сигналы с постоянным периодом, но переменные по времени (рис. 59), которые могут быть использованы для пуска электромагнитных приводов, например, клапана системы рециркуляции ОГ.
Передача данных внутри ЭБУ
Для обеспечения нормальной работы микропроцессора периферийные компоненты должны иметь возможность обмениваться с ним данными. Это имеет место при использовании адресной шины или шины передачи данных, через которую микропроцессор выдает, например, адрес оперативной памяти (RAM), которая должна быть в данный момент доступна. Шина передачи данных используется затем для передачи соответствующих данных. Предшествующим автомобильным системам удовлетворяла 8-битовая топология с шиной передачи данных, включавшей в себя восемь линий, которые все вместе могли передавать 256 данных одновременно. 16-битовая адресная шина, которая обычно использовалась в таких системах, могла передавать данные в 65536 адресов.
Современные, более сложные системы, требуют для шины передачи данных 16 бит или даже 32 бит. Для того, чтобы сохранить компоненты систем в действии, для адресных шин (шин передачи данных) может быть использована мультиплексная (многократная) передача. То есть данные и адреса отправляются по тем же самым линиям передачи, но смещаются один от другого во времени.
Встроенная диагностика
- Текущий контроль датчиков. Для того чтобы удостовериться в наличии нормального напряжения питания и в том, что выходной сигнал датчика находится в допустимых пределах (например, для температурного датчика это диапазон между -40 и +150”С), работа датчиков отслеживается встроенными диагностическими устройствами.
Сигналы наиболее важных датчиков, насколько это возможно, дублируются. Это означает, что в случае нарушения работы может быть использован другой подобный сигнал, или может быть выполнено два-три выбора.
- Определение неисправностей.
Это возможно осуществлять в пределах специальной области слежения за работой датчиков. В случае систем с программами обратной связи (например, контроль давления), возможно также диагностировать отклонение отданного диапазона регулирования.
Путь прохождения сигнала может считаться неправильным, если неисправность присутствует больше заданного периода времени. Если однажды этот период был превышен, то неисправность сохраняется в памяти ЭБУ вместе с параметрами условий, при которых она случилась (например, температура охлаждающей жидкости, частота вращения коленчатого вала двигателя и др.).
Для многих неисправностей возможна повторная проверка датчика, если путь прохождения данного сигнала будет определен при отслеживании как не имеющий неисправности в рассматриваемом периоде времени.
- Реакция в случае наличия неисправности. Если выходной сигнал датчика выходит за допустимые пределы, то происходит переключение на значение сигнала по умолчанию. Эта процедура используется применительно к следующим входным сигналам: напряжению аккумуляторной батареи; температуре охлаждающей жидкости, воздуха на впуске, моторного масла; давлению наддува; атмосферному давлению и расходу воздуха на впуске.
В случае нарушения важных для движения функций осуществляется переключение на заменяющие функции, которые позволяют водителю доехать, например, до автосервиса. Если один из потенциометров в модуле положения педали акселератора оказывается неисправным, то для расчетов могут использоваться сигналы второго потенциометра, при условии их правдоподобности, или работа двигателя может быть переключена на режим постоянной малой частоты вращения.
Принцип работы системы электронного управления
ЭБУ оценивает сигналы, полученные от внешних датчиков, и ставит ограничения по допустимому уровню напряжения.
Используя эти входные данные и хранящиеся в памяти программируемые матрицы, микропроцессор рассчитывает продолжительность и угол опережения (момент начала) впрыска и преобразует эти данные в сигналы для характеристик как функции времени, которые затем адаптируются к движению поршней. Учитывая высокие динамические нагрузки двигателя и большую частоту вращения, требуются высокие вычислительные возможности микропроцессора, чтобы соответствовать требованиям по точности вычислений. Выходные сигналы используются для запуска задающих каскадов, которые передают соответствующую мощность для всех исполнительных устройств (например, электромагнитных клапанов), включая приводы для таких функций двигателя, как рециркуляция ОГ и перепуск газов мимо турбины турбокомпрессора, а также для дополнительных функций, как реле свечей накаливания и кондиционер. Задающие каскады защищаются от разрушения и повреждений из-за короткого замыкания и электрической перегрузки. Сигналы о таких нарушениях в работе, как обрыв электрической цепи, передаются обратно в микропроцессор.
Диагностические функции задающих каскадов электромагнитных клапанов также определяют сигнальный код неисправности. Кроме того, определенное число выходных сигналов посылается другим системам автомобиля через интерфейс. ЭБУ также отслеживает работу всей системы топливоподачи в пределах рамок концепции безопасности.
Управление рабочими режимами
Для обеспечения оптимального процесса сгорания в двигателе, ЭБУ должен осуществлять соответствующий расчет величины подачи топлива для каждого рабочего режима. Блок-схема расчета величины подачи топлива показана на рис. 60.
Пусковая подача топлива
Пусковая подача топлива рассчитывается как функция температуры охлаждающей жидкости и частоты вращения коленчатого вала двигателя. ЭБУ выдает выходной сигнал на пусковую подачу от момента включения “зажигания” (положение “А” на рис. 60) и свечей накаливания, и до момента, когда достигается минимальная частота вращения коленчатого вала двигателя. Водитель не может оказывать влияния на величину пусковой подачи.
Управление движением автомобиля
Во время движения автомобиля количество впрыскиваемого топлива (величина подачи) рассчитывается как функция положения педали акселератора (датчик положения педали акселератора) и частоты вращения коленчатого вала двигателя (выключатель “зажигания” в положении “В” на рис. 60) с использованием многопараметровой характеристики управления автомобилем. Такое управление обеспечивает оптимальное соответствие действий водителя и выбора мощности двигателя.
Регулирование минимальной частоты вращения холостого хода
На минимальном режиме холостого хода расход топлива обусловлен главным образом механическим КПД двигателя и частотой вращения.
В современном плотном движении транспорта с частыми остановками основная доля расхода топлива приходится на минимальные режимы холостого хода. Это, следовательно, означает, что с одной стороны минимальная частота вращения холостого хода должна поддерживаться как можно более низкой, а с другой стороны, независимо от нагрузки (включенный кондиционер, положение селектора автоматической коробки передач, маневрирование при работе усилителя рулевого управления и др.), она никогда не должна уменьшаться ниже определенного минимума, когда двигатель начинает работать с рывками или даже останавливаться.
Для того чтобы установить необходимую частоту вращения, контроллер минимальном частоты вращения холостого хода изменяет подачу топлива до тех пор, пока измеренное ее значение не станет равным требуемому. Величина требуемой частоты вращения и характеристики управления определяются положением селектора (в автоматической коробке передач) и температурой охлаждающей жидкости двигателя (по сигналу датчика температуры охлаждающей жидкости).
Кроме учета влияния момента сопротивления от приложения внешней нагрузки внешней, следует также принимать во внимание моменты внутреннего трения, которые должны компенсироваться системой управления минимальной частоты вращения холостого хода. Эти изменения минимально, но постоянно осуществляются в течение всего срока эксплуатации автомобиля.
Регулирование плавности работы двигателя
Из-за наличия допусков при изготовлении и в зависимости от износа двигателя имеются различия в величине крутящих моментов, создаваемых отдельными цилиндрами. Это особенно проявляется на минимальном режиме холостого хода, когда приводит к неравномерной, с рывками, работе двигателя. Система управления плавностью работы двигателя отслеживает изменения в его работе в каждый момент времени, когда происходит вспышка в цилиндрах, и сравнивает работу цилиндров друг с другом. Затем происходит регулирование количества впрыскиваемого топлива в каждый цилиндр в зависимости от измеренной разницы в частоте вращения между отдельными цилиндрами, в результате чего вклад каждого цилиндра в создание крутящего момента двигателя оказывается одинаковым.
Управление скоростью автомобиля (система Cruise Control)
Контроллер системы поддержания скорости автомобиля (Cruise Control) позволяет обеспечить управление автомобилем с заданной постоянной скоростью движения.
Он поддерживает скорость автомобиля в соответствии со значением выбранным водителем с помощью переключателя, находящегося на приборной панели.
В процессе регулирования количество впрыскиваемого топлива увеличивается или уменьшается до тех пор, пока действительная скорость не станет равной установленной. Процесс регулирования автоматически прекращается, как только водитель нажмет на педаль сцепления или тормоза. Если водитель нажимает на педаль акселератора, то ускорение автомобиля возможно только до установленной системой “Cruise Control” скорости. Как только педаль акселератора отпускается, контроллер снова начинает регулировать скорость в соответствии с предыдущей установкой. Если система "Cruise Control” была отключена, то водителю достаточно нажать кнопку включения, чтобы снова выбрать установленную ранее скорость.
Возможна также ступенчатая установка желаемой скорости с использованием переключателя “круиз-контроля”.
Управление режимом ограничения подачи топлива
Имеется ряд причин, по которым нежелательно, чтобы всегда впрыскивалось максимальное количество топлива.
Такими причинами могут быть:
- высокая эмиссия вредных веществ с ОГ;
- высокая эмиссия сажевых частиц из-за избыточной подачи топлива;
- механическая перегрузка при максимальном моменте или при большом превышении частоты вращения;
- термическая перегрузка как результат повышенной температуры охлаждающей жидкости, масла или отработавших газов турбокомпрессора.
Ограничение количества впрыскиваемого топлива формируется по ряду входных параметров, например, по массовому расходу воздуха, частоте вращения и температуре охлаждающей жидкости.
 Рис. 61 Активное демпфирование колебаний. 1 - резкое нажатие на педаль акселератора, 2 - характеристика частоты вращения без активного демпфирования колебаний, 3 - характеристика частоты вращения с активным демпфированием колебаний.
Рис. 61 Активное демпфирование колебаний. 1 - резкое нажатие на педаль акселератора, 2 - характеристика частоты вращения без активного демпфирования колебаний, 3 - характеристика частоты вращения с активным демпфированием колебаний.
Демпфирование колебаний частоты вращения
При резком нажатии или отпускании педали акселератора происходит быстрое изменение количества впрыскиваемого топлива и, как результат, быстрое изменение крутящего момента двигателя. Такие резкие изменения нагрузки двигателя приводят к образованию “упругих” вибраций и, как следствие, к колебаниям частоты вращения коленчатого вала двигателя (рис. 61).
Демпфирование колебаний снижает такие периодические колебания частоты вращения путем соответствующего изменения количества впрыскиваемого топлива с такой же частотой, что и частота колебаний частоты вращения, то есть меньшее количество топлива впрыскивается в момент увеличения частоты вращения, и большее при ее уменьшении.
Высотная компенсация
Атмосферное давление влияет на регулирование давления наддува и является ограничителем крутящего момента двигателя. При использовании датчика атмосферного давления его величина может быть измерена ЭБУ, так что при работе на большой высоте цикловая подача топлива может быть уменьшена и, соответственно, снижена дымность ОГ двигателя.
Отключение цилиндров
Вместо того чтобы впрыскивать очень маленькие дозы топлива для уменьшения крутящего момента на высоких частотах вращения холостого хода и на малых нагрузках, может быть применен метод отключения части цилиндров. Например, может быть отключена половина форсунок (топливные системы с насос-форсунками, индивидуальными ТНВД и Common Rail), при этом оставшиеся в работе форсунки будут подавать большее количество топлива с большей точностью дозирования подачи.
В процессах включения и выключения цилиндров алгоритмы специальной программы обеспечивают плавность перехода режимов, в результате чего колебания крутящего момента не возникают.
Остановка двигателя
Работа дизеля основана на принципе самовоспламенения. Это означает, что остановка двигателя возможна только при прекращении подачи топлива.
Остановка двигателей с электронной системой управления осуществляется по сигналу ЭБУ “цикловая подача - ноль” (Не подается пусковой сигнал на электромагнитные клапаны управления подачей). Имеется также некоторое число резервных способов остановки двигателя. Топливным системам с насос-форсунками и индивидуальными ТНВД свойственна высокая безопасность. Другими словами, непреднамеренный впрыск может произойти только один раз. Следовательно, остановка дизеля имеет место при выключении электромагнитных клапанов управления подачей топлива.
Обмен информацией
Связь между ЭБУ двигателя и другими ЭБУ автомобиля осуществляется через контроллер сети - систему шин передачи данных CAN. Эта система служит для передачи желаемых и установочных значений параметров, эксплуатационных данных и информации о состоянии систем, что требуется для определения ошибок и эффективного управления (см. раздел “Передача данных другим системам”).
Внешнее влияние на величину цикловой подачи топлива
Внешнее влияние на величину цикловой подачи оказывают ЭБУ других систем (например, ABS, TCS), которые информируют ЭБУ двигателя о том, нужно ли изменять величину крутящего момента двигателя (и, следовательно, величину подачи), и если так, то насколько.
Электронный иммэбилайзер
Одной из мер защиты от угона автомобиля является ЭБУ иммобилайзера, который может быть установлен для предотвращения несанкционированного пуска двигателя.
При этом водитель может использовать сигнал дистанционного управления, чтобы сообщить ЭБУ, что он намеревается использовать автомобиль. ЭБУ иммобилайзера сообщает затем ЭБУ двигателя, что запрет на подачу топлива может быть снят, и двигатель может запускаться.
Кондиционер
При высокой температуре окружающей среды кондиционер охлаждает воздух в салоне автомобиля до желаемого уровня посредством использования компрессора холодильной установки.
В зависимости от типа двигателя и особенностей режимов движения мощность, затрачиваемая на привод компрессора, может достигать 30% от мощности двигателя.
Система электронного управления двигателя быстро выключает компрессор, как только водитель резко нажимает на педаль акселератора (другими словами, резко увеличивает крутящий момент двигателя).Это позволяет получить полную мощность двигателя для обеспечения разгона автомобиля и практически не влияет на температуру в салоне автомобиля.
Блок управления свечей накаливания
ЭБУ двигателя обеспечивает блок управления свечей накаливания информацией о необходимости включения нагрева свечей и длительности периода нагрева. Блок управления свечей накаливания следит за процессом нагрева и передает в ЭБУ двигателя информацию о любых неисправностях с целью диагностики.
 Рис. 62 Последовательность пусковых сигналов в электромагнитных клапанах высокого давления топлива. 1 - фаза пускового тока (тока страгивания), 2 - определение угла опережения впрыска (момента начала впрыска), 3 - фаза удерживания тока, 4 - резкий сброс питания.
Рис. 62 Последовательность пусковых сигналов в электромагнитных клапанах высокого давления топлива. 1 - фаза пускового тока (тока страгивания), 2 - определение угла опережения впрыска (момента начала впрыска), 3 - фаза удерживания тока, 4 - резкий сброс питания.
Электромагнитные клапаны высокого давления в топливных системах с насос-форсунками и индивидуальными ТНВД: Пусковые сигналы
Пусковые сигналы на электромагнитные клапаны высокого давления накладывают жесткие требования на задающие каскады
Необходимость соблюдения малых допусков и повторяемости цикловых подач с высокой точностью требует, чтобы текущие импульсы характеристики тока имели крутые передний и задний фронты.
При формировании пусковых сигналов используется текущий контроль, в котором процесс формирования разделяется на фазу увеличения (подъема) тока страгивания и фазу его удерживания. Между этими двумя фазами на короткий период времени подается постоянное напряжение для того, чтобы определить момент закрытия электромагнитного клапана. Текущий контроль должен быть таким точным, чтобы ТНВД или форсунка всегда обеспечивали повторяемость процесса впрыска топлива на каждом рабочем режиме. Текущий контроль также является ответственным за снижение потерь энергии в ЭБУ и электромагнитных клапанах. Для того чтобы обеспечить заданное и быстрое открытие электромагнитного клапана в конце процесса впрыска, энергия, хранящаяся в клапане, мгновенно сбрасывается путем подачи высокого напряжения на его выводы.
За расчет индивидуальных пусковых фаз отвечает микропроцессор. Этот процесс осуществляется с помощью так называемой логической матрицы, характеризующейся высокими вычислительными возможностями, которые выполняют это требование путем генерирования двух цифровых пусковых сигналов в режиме реального времени - “MODE” сигнал и “ON” сигнал. В свою очередь, эти пусковые сигналы заставляют задающие каскады генерировать необходимую последовательность текущего пускового процесса (рис. 62).
Управление периодом начала впрыска топлива (углом опережения впрыска)
Начало впрыска топлива определяется как момент времени (угол п.к.в.), в который электромагнитный клапан высокого давления закрывается, и начинается увеличение давления в камере высокого давления ТНВД. Как только давление превысит величину давления начала подъема иглы форсунки, последняя открывается, и начинается процесс впрыска топлива. Расчет действительной подачи топлива при впрыске осуществляется в периоде между началом подачи и снятием пускового сигнала с электромагнитного клапана. Этот период называется продолжительностью впрыска топлива.
Угол опережения впрыска топлива, то есть момент начала впрыска, оказывает существенное влияние на мощность двигателя, расход топлива, эмиссию вредных веществ с ОГ и шум. Установочное значение угла опережения впрыска, являющееся функцией частоты вращения коленчатого вала двигателя и величины подачи топлива, хранится в многопараметровых характеристиках в ЭБУ. Его величина может быть скорректирована в зависимости от температуры охлаждающей жидкости двигателя.
По причине наличия технологических допусков и изменений в работе электромагнитных клапанов высокого давления топлива в течение срока их службы, могут иметь место небольшие различия в моментах включения электромагнитных клапанов данного двигателя. Это приводит к различиям в моментах начала впрыска топлива в индивидуальных ТНВД разных цилиндров.
Для соответствия требованиям норм по эмиссии вредных веществ с ОГ и для достижения хороших результатов по плавности работы двигателя необходимо компенсировать указанные нарушения посредством соответствующего алгоритма управления.
Рассматривая прямую корреляцию между геометрическим началом подачи и началом впрыска топлива, описанными выше, для обеспечения точного регулирования величины угла опережения впрыска достаточно учитывать точные данные о начале геометрической подачи.
Для точного определения момента начала геометрической подачи топлива используется электронный расчет силы тока, проходящего через обмотку электромагнитного клапана, и в этом случае использование дополнительного датчика (например, датчика подъема иглы форсунки) не требуется. Пусковой сигнал на электромагнитный клапан высокого давления формируется постоянным напряжением вблизи момента времени, когда клапан должен закрываться. Магнитная индукция, возникающая при закрытии электромагнитного клапана, придает характеристике тока в обмотке клапана индивидуальное значение. Она оценивается ЭБУ, и отклонения от ожидаемого установочного значения момента закрытия для каждого электромагнитного клапана сохраняются в памяти, чтобы быть использованными как данные для компенсации при последующем процессе впрыска топлива.
Передача данных другим системам
Обзор систем
Современные системы электронного управления автомобилей включают следующие функции:
- электронное управление двигателем и собственно ТНВД;
- электронное управление переключением передач в трансмиссии;
- антиблокировочную систему тормозов (ABS);
- противобуксовочную систему (TCS);
- электронную систему курсовой устойчи-вости (ESP);
- систему управления тормозным момен¬том (MSR);
- электронные иммобилайзеры (EWS);
- бортовые компьютеры и т.д.
Использование указанных функций делает необходимым обеспечение связи между индивидуальными ЭБУ посредством работы в сети. Обмен информацией между различными системами управления уменьшает общее количество датчиков, активизируя в то же время использование потенциальных возможностей, присущих индивидуальным системам. Интерфейсы систем связи, которые были специально разработаны для применения в автомобилях, могут быть подразделены на две категории: обычные интерфейсы; последовательные интерфейсы, то есть CAN (Controller Area Network).
 Рис. 63 Схема обычной передачи данных. 1 - блок управления коробкой передач, 2 - комбинация приборка, 3 - блок управления двигателем, 4 - блок управления системами ABS/ESP.
Рис. 63 Схема обычной передачи данных. 1 - блок управления коробкой передач, 2 - комбинация приборка, 3 - блок управления двигателем, 4 - блок управления системами ABS/ESP.
Обычная передача данных
В обычных автомобильных системах передачи данных для каждого сигнала предоставлен один канал связи (рис. 63). Двоичные сигналы могут быть переданы только как один из двух возможных - “1” или “0” (высокий или низкий уровень, соответственно). Примером здесь может быть компрессор автомобильного кондиционера, который либо включен (On), либо выключен (Off).
Для передачи постоянно меняющихся данных, таких как сигналы датчика положения педали акселератора, могут быть применены двоичные сигналы “ON/OFF”.
Все увеличивающийся поток данных между различными электронными бортовыми системами означает, что обычные интерфейсы не могут больше обеспечивать удовлетворительные характеристики передачи данных, Сложность электрической проводки и размеры соответствующих разъемов уже сегодня являются очень сложными для контроля, в то время как требования для обмена данными между ЭБУ все повышаются.
В некоторых моделях автомобилей каждый ЭБУ соединяется в сети с числом различных компонентов до 30 - предоставление каналов, которое практически невозможно обеспечить с обычной проводкой за допустимую цену.
Последовательная передача данных (CAN)
Проблемы, связанные с обменом данными при использовании многочисленных проводов и обычных интерфейсов, могут быть решены путем применения шин передачи данных. CAN есть система с шинами передачи данных, специально спроектированная для применения в автомобилях. Данные транслируются в виде последовательной передачи, то есть элементы информации передаются один за другим по одной линии (одному каналу связи). ЭБУ могут получать и передавать данные при условии, что они оснащены последовательным интерфейсом CAN.
Области применения
Имеются четыре представленные ниже основные области применения системы CAN в автомобиле.
- Мультиплексная передача. Мультиплексная (многократная) передача данных удобна для использования с программами, осуществляющими управление в замкнутых или в разомкнутых цепях в системах бортовой электроники, включая системы комфорта и удобства, такие как климат-контроль, центральный замок и регулировка сидений.
Скорость передачи данных обычно находится в пределах от 10 кбит/с до 125 кбит/с (низкоскоростная CAN).
- Программы мобильной связи. В области мобильной связи во взаимосвязи с центральным дисплеем и элементами управления работают такие компоненты, как система навигации, телефон и аудиоустановки.
Здесь целью является стандартизация операционных последовательностей, насколько это возможно, и концентрации информации о состоянии систем в данный момент времени так, чтобы свести к минимуму возможность ошибок водителя.
Скорость передачи данных до 125 кбит/с. В этой области прямая трансляция аудио- и видеоданных невозможна.
- Диагностические программы. В диагностических целях система CAN используется в уже существующей сети для диагностики подсоединенных к ней ЭБУ. Существующая сегодня общая форма диагностики, использующая линию “К” (ISO 9141) в дальнейшем окажется недостаточной.
Скорость передачи данных планируется равной 500 кбит/с.
- Применение систем в режиме реального времени. Применение систем в режиме реального времени необходимо для управления движением автомобиля.
Такие электрические системы, как системы управления двигателем, управления переключением передач и электронная система курсовой устойчивости (ESP) работают друг с другом в сети.
Скорость передачи данных в пределах от 125 кбит/с до 1 Мбит/с (высокоскоростная шина CAN) требуется для того, чтобы гарантировать быстродействие в режиме реального времени.
 Рис. 64 Схема топологии линейной шины. 1 - блок управления коробкой передач, 2 - комбинация приборов, 3 - блок управления двигателем, 4 - блок управления системами ABS/ESP.
Рис. 64 Схема топологии линейной шины. 1 - блок управления коробкой передач, 2 - комбинация приборов, 3 - блок управления двигателем, 4 - блок управления системами ABS/ESP.
Работа ЭБУ в сети
Стратегия работы в сети предусматривает, что такие электронные системы, как электронное управление двигателем, антиблокировочная система тормозов (ABS), противобуксовочная система (TCS), электронная система курсовой устойчивости (ESP), электронное управление переключением передач в автоматической трансмиссии и др. соединяются одна с другой через интерфейс CAN.
Внутри линейной шинной топологии ЭБУ считаются равными “партнерами” (рис. 64). Преимущества этой структуры, известной как принцип ‘Multi-Master”, заключаются в том, что неисправность одного приписанного к ней блока не оказывает влияния на другие. Возможность общей неисправности является, таким образом, существенно более низкой, чем в других логических структурах, как например, в замкнутых цепях или иерархических структурах, в которых неисправность одной системы или центрального ЭБУ вызывает неисправность всей структурной системы.
Типичные скорости передачи данных находятся в пределах от 125 кбит/с до 1 Мбит/с. Скорости должны быть такими высокими, для того чтобы гарантировать заданные характеристики в режиме реального времени. Это означает, например, что данные о нагрузке двигателя от его ЭБУ поступают в ЭБУ коробкой передач в течение нескольких миллисекунд.
Рис. 65 Адресация и фильтрация сообщений.
Ассоциативная адресация данных
Система данных CAN не обращается к каждому терминалу индивидуально, а вместо этого назначает каждое “сообщение” фиксированным “идентификатором” длиной в 11 бит (стандартный формат для легковых автомобилей) или 29 бит (удлиненный формат для коммерческих автомобилей). Таким образом, в идентификаторе заключено содержание сообщения (например, частота вращения коленчатого вала двигателя).
Несколько сигналов могут быть включены в одно сообщение, как, например, число переключающих позиций.
Каждая станция (ЭБУ) обрабатывает только те сообщения, идентификация которых хранится в их собственном перечне, которые должны быть приняты (фильтрация сообщений, рис. 65).
Все другие сообщения просто игнорируются. Эта операция может выполняться специальным модулем CAN (Full-CAN), так что на микропроцессор ложится меньшая нагрузка. Основные модули CAN читают все сообщения, и затем микропроцессор делает выборку соответствующего запоминающего устройства.
С системой ассоциативной адресации данных один сигнал может быть послан нескольким блокам. Данный передатчик должен просто послать свой сигнал прямо в сеть шины передачи данных через ЭБУ, так что сигнал оказывается доступным всем получателям. Кроме этого, поскольку к существующей системе CAN в будущем могут быть добавлены другие блоки, то может быть задействовано множество вариантов оборудования. Если ЭБУ требует дополнительную информацию, которой располагает шина передачи данных, то все, что требуется, это просто вызвать ее.
Назначение приоритетов
Идентификатор не только показывает содержание данных, но также определяет приоритет сообщения. Сигналы, подверженные быстрым изменениям (например, частота вращения), очевидно, должны быть приняты без задержки и без потери данных. В результате эти быстро меняющиеся сигналы имеют более высокий приоритетный рейтинг, чем сигналы, темп изменения которых является относительно низким (например, температура охлаждающей жидкости двигателя). Кроме того, сообщения сортируются в соответствии с их “важностью” (например, функции, касающиеся безопасности работы, относятся к особо “важным”). В шине передачи данных никогда не находятся два или более сообщения одинакового приоритета.
Шина арбитража
Каждый блок может начинать передачу самых приоритетных сообщений, как только шина оказывается незанятой. Если несколько блоков начинают передачу данных одновременно, то возникающий конфликт доступа к шине разрешается путем предоставления первого доступа сообщению с самым высоким приоритетом, без какой-либо формы задержки и без потерь бит данных (неразрушаемый протокол). Это имеет место при использовании “рецессивных” (логические 1) и “доминантных” (логические 0) бит - посредством доминантных бит “переписываются” рецессивные биты. Передатчики с сообщениями низкого приоритета автоматически становятся приемниками и повторяют попытку передачи их сообщения, как только шина передачи данных становится снова свободной. Для того чтобы все сообщения имели возможность войти в шину, скорость передачи данных в шине должна соответствовать числу блоков, работающих с этой шиной. Для тех сигналов, которые постоянно пульсируют (например, частота вращения коленчатого вала двигателя), определяется время цикла.
 Рис. 66 Формат сообщения.
Рис. 66 Формат сообщения.
Формат сообщений
Для передачи в шину генерируется кадр данных с максимальной длиной 130 бит (стандартный формат) или 150 бит (расширенный формат). Это позволяет свести к минимуму время ожидания следующей - возможно, исключительно срочной - передачи данных. Кадры данных включают в себя семь последовательных зон (полей) (рис. 66).
“Начало кадра” определяет начало передачи данных и синхронизирует все системы;
“Поле арбитража” объединяет идентификатор сообщения и дополнительный управляющий бит. Во время передачи этого поля передающее устройство сопровождает передачу каждого бита для проверки того, что в данный момент не происходит передачи другими блоками сообщения более высокого приоритета. Управляющий бит решает, как классифицировать данное сообщение - как “информационный кадр данных” или как “отдаленный сигнал”.
“Поле управления” содержит в себе код, указывающий на количество битов в кадре данных. Это позволяет приемнику сигнала определить, что все биты информации были получены.
“Поле данных” имеет информационное содержание между 0 и 8-ю битами. Сообщение длиной данных “0” может быть использовано для синхронизации распределенных процессов.
“Поле CRC (Cyclic Redundancy Check - цик-лическая проверка избыточности)” содержит в себе контрольное слово для определения возможных помех при передаче данных.
“Область подтверждения приема” содержит в себе сигнал подтверждения приема, при котором все приемные устройства показывают прием неповрежденных сигналов, независимо оттого, были они обработаны или нет.
“Конец кадра” указывает на окончание приема сообщения.
Встроенные средства диагностики
Система CAN с шиной передачи данных снабжена определенным количеством контрольных функций для выявления ошибок. Эти функции включают в себя проверочный сигнал в “информационном кадре”, а также функцию слежения, при котором каждое передающее устройство снова получает свой собственный сигнал и, таким образом, может определить любые отклонения от него.
Если система определяет наличие ошибки, то она посылает так называемый “признак ошибки’, который останавливает идущую передачу данных. Это предотвращает возможное получение неправильных данных другими блокам.
В случае повреждения блока управления может так случиться, что все передаваемые данные, включая не содержащие ошибок, будут помечены “признаком ошибки”. Для предотвращения этого система CAN включает в себя специальную функцию, которая может различать перемежающуюся или постоянную ошибки или помехи и, следовательно, локализовать повреждения в блоках. Данный процесс основывается на статистическом анализе условий возникновения ошибок.
Стандартизация
Международная организация по стандартизации (ISO) и SAE установила стандарты для системы передачи данных CAN в применении к автомобильной технике:
- ISO 11519-2 - для низкоскоростной передачи информации - скорость до 125 кбит/с;
- ISO 11898 и SAE J22584 (легковые автомобили) и SAE J1939 (грузовики и автобусы) -для высокоскоростной передачи информации - скорость больше 125 кбит/с.
Стандарты ISO на CAN-диагностику (ISO 15756 - проект) находятся в процессе подготовки.
ЭБУ - сокращение от термина "электронный блок управления двигателем" на английском языке звучит Powertrain Control Module, представляет собой одну из основных частей системы контроля за двигателем транспортного средства. Часто этот блок называют «мозг» системы управления двигателем. ЭБУ принимает и обрабатывает входящую информацию от большинства датчиков автомобиля и, оперируя собранными данными, обуславливает управляющее воздействие на большинство управляющих систем.
Преимущества электронного блока управления двигателем:
- оптимизация мощности и крутящего момента двигателя;
- оптимизация расхода горючего и состава отработанных топливных газов;
- оптимизация остальных опций работы двигателя внутреннего сгорания.
Основной принцип работы блока управления двигателем
Приспособление сконструировано по принципу объединения программного обеспечения и аппаратной части девайса. Основным компонентом аппаратного обеспечения можно назвать микропроцессор, перерабатывающий аналоговые сигналы с датчиков автомобиля. В некоторых случаях бортовик обеспечивает аппаратное воздействие, совершаемое с помощью совместного перерабатывающего устройства.
Модули программного обеспечения блока управления:
Функциональный . Получает и обрабатывает сигналы от сенсоров, а также оказывает управляющее воздействие на отдельные устройства автомобиля.
Контролирующий . Выполняет проверку и корректирует сигналы. Большинство Электронных Блоков Управления являют собой программированное устройство, благодаря чему пользователь в любой момент может перепрограммировать девайс. Эта функция особенно актуальна для тех, кто решил заняться тюнингом двигателя: установкой турбины и гиперкулера, внесением изменений в топливную систему или установкой дополнительного оборудования для обработки дополнительных видов топлива.
Функции, которые выполняет электронный блок управления двигателем:
- Оптимизация, корректировка и контроль за впрыском топлива;
- Корректирование положения при любом ходу;
- Оптимизация систем, отвечающих за зажигание, предотвращение неполадок связанных с ним;
- Регулирование отработанных газов и управление системами сбора паров отработанного топлива;
- Продвинутое регулирование большинства систем регулирования газов и управление их распределением;
- Регулирование температуры жидкости для охлаждения.
Электронный блок управления двигателем подключается ко всей электронике автомобиля и работает в совокупности с ними.
Основные признаки проблем с электронным блоком управления:
Замену ЭБУ нужно производить лишь после тщательной диагностики и определения причин неисправности.
- отсутствие сигналов, отвечающих за управление системами двигателя и исполнительными механизмами;
- отсутствие реакции на регулирование датчиков автомобиля;
- полное отсутствие любой связи с подключающимся диагностическим устройством;
- физические повреждения ЭБУ.
Основные причины возникновения неисправностей в ЭБУ:
- Вмешательство в электронные системы авто неквалифицированным работником;
- «Прикуривание» при рабочем двигателе автомобиля;
- Неправильное подключение полярности аккумулятора авто;
- Снятие клеммы аккумулятора при рабочем двигателе;
- Запуск стартера при отсоединенной силовой шине;
- Попадание электрода на датчики или проводку при проведении сварочных работ;
- Чрезмерная влажность, что приведет к попаданию воды в блок ЭБУ;
- Неисправность частей системы зажигания;
- Замыкание или частичных обрыв проводки автомобиля.
При возникновении неисправности следует незамедлительно отвезти автомобиль в сервис.
В сервисных условиях можно определить лишь основные коды внутренних неисправностей. Блок ремонту не подлежит, меняется целиком.
Произвести самостоятельный поиск неисправности можно следуя универсальному алгоритму:
- визуальный осмотр электронного блока управления двигателем;
- сканирование с помощью специального оборудования;
- проверка исправности приспособления путем его замены;
- мониторинг функций обеспечения работы бортовика;
- полная проверка функций исполнения бортовика.
Прежде, чем произвести визуальный осмотр или замену, нужно убедиться что:
- в бензобаке отсутствует топливо;
- в выхлопной трубе отсутствует затычка;
- клеммы аккумулятора надежно затянуты;
- электропроводка авто не повреждена;
- ключ зажигания подлинный.
Следует отметить один важный момент - когда вы меняете блок управления, то основная работа заключается в подключение к проводке через соответствующие разъемы. Подключение часто усложняется и труднодоступностью к расположению ЭБУ.
Нужно помнить, что в любом случае перед тем как подключать блок нужно отсоединить клемму от аккумулятора , иначе вероятность выхода из строя электронного блока очень высока.
А вместе с ним, последствия коснутся работы электропитания, трансмиссии, выхлопной системы и других элементов. Поскольку для правильного функционирования, электронный блок нуждается в сигналах от всех датчиков, ему требуется нормальное напряжение от , хорошее соединение с «массой» и возможность отправлять управляющие импульсы и сигналы всем исполнительным устройствам электронной системы.
Связанные термины
Одной из важнейших составляющих современного транспортного средства, является электронный блок управления системой двигателя. Данный элемент, принимает информацию с контролирующих приборов и преобразует их в последующее действие. Благодаря электронике, производится влияние на действующие компоненты двигателя. Элемент, преобразует полученную информацию, нормализуя функционирование движка авто. Для выявления неисправностей и дальнейших действий с управляющим компонентом, рассмотрим его устройство и принцип функционирования.
Блок управления двигателем, составные элементы и принцип функционирования.
Блок управления двигателем, является сложным элементом, нормализующим важнейшие характеристики системы. Благодаря данному устройству, обеспечивается оптимальный расход топливной смеси и правильный момент вращения составляющих мотора. Помимо этого, компонент управления двигателем, контролирует количество вредных веществ в выхлопной смеси и осуществляет множество важнейших функций в работе авто.
Электронный блок управления, заключает в себе два типа обеспечения движка. Аппаратная часть компонента, контролирует электронные устройства и приборы авто. Руководит данным действием, специальный процессор в составе элемента.
Показатели датчиков, получают числовую форму. За данный процесс, отвечает преобразователь. Программная составляющая компонента, содержит в себе модули вычисления — контролирующий и функционирующий. Данные элементы, принимают и преобразуют полученную информацию. После преобразования сигналов, они направляются на исполнительные элементы системы, нормализующие функцию мотора. На выходе, сигнал обрабатывается до определенного действия. Таким образом, при неправильной функции движка, благодаря соответствующим сигналам, происходит полная остановка мотора авто.
Блок управления двигателем, имеет необходимое программное обеспечение, заложенное производителем. В случае модернизации автомобиля, блок управления двигателем, должен быть запрограммирован повторно. Данное действие, осуществляется с учетом реконструкции движка и отдельных особенностей. Части элемента, составляют взаимодействующую систему. Обмен информацией, происходит через соединительную шину. Таким образом, совокупность компонентов, представляют систему, контролирующую функцию мотора авто.
Каждый современный автомобиль, оснащается системой контроля двигателем. Блок управления двигателем, получает функцию оптимизации работы важнейшей части автомобиля. Регулировку и настройку отдельных компонентов двигательной системы, для правильной работы машины, осуществляет электронный блок управления двигателем. Благодаря рассматриваемому элементу, происходит наиболее продуктивная работа двигателя и предотвращение преждевременного износа.
Блок управления двигателем, отвечает за работу следующих совокупностей:
- Система подачи топлива.
- Охлаждение рабочих элементов двигателя.
- Система впуска и выпуска.
- Выхлоп отработанных газов.
- Управление двигательной системы, возлагается на центральный блок управления.
Путем регулировки исполнительными устройствами, обеспечивается наиболее правильная работа всех систем.
Диагностика.
Как и любое электронное устройство, рассматриваемый элемент, нередко приходит в неисправность. Каждый автолюбитель, может столкнуться с необходимостью ремонта управляющего блока. При достаточном опыте и соответствующих знаниях, возможна самостоятельная реконструкция элемента, но в большинстве случаев данный вопрос передается профессионалам. Для успешной диагностики и выявления причин неисправности, необходимо знать модель элемента — установленного на ваш автомобиль. Подробное описание технических особенностей устройства, можно найти в комплектующем руководстве.
Рассмотрим основные причины неправильной работы устройства.
Чаще всего, электронный блок управления подвергается реконструкции, при регулярном нарушении питания. В данном случае, может возникнуть поломка компонента, требующая своевременного устранения. Среди факторов — указывающих на неисправность, можно выделить следующие:
- Нарушение обмена информацией, в связи с чем — нарушена правильная работа управляющего устройства.
- Не работающий индикатор, при включении зажигания.
- Контрольный датчик показывает ошибку. Данный факт, можно обнаружить, при поломке одного из элементов устройства регулировки.
Не всегда, неправильность работы двигателя сопровождается соответствующими показаниями датчиков. По этому, при обнаружении ошибок в работе двигателя, необходимо своевременно диагностировать электронный блок управления.
Наиболее типичными причинами поломки устройства, являются:
- Нарушение герметичности проводников. В связи с данной неполадкой, изменяется напряжение в системе и контрольный элемент, начинает работать неправильно.
- Сбилась прошивка блока.
Восстановить прошивку самостоятельно, весьма проблематично. Для этого, необходимо обладать определенным набором знаний и хорошим опытом. А вот проверить проводку, можно используя специальный прибор. Если проверка проводников, не дала ответов на вопрос — необходимо обратиться к профессионалам, для восстановления программной части.
Удачной диагностики!
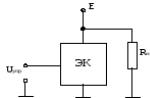
Главная часть системы впрыска - электронный блок управления двигателем ЭБУ. Он является вычислительным центром - в зависимости от сигналов датчиков, по определенным алгоритмам, выдает управляющие воздействия на исполнительные устройства системы управления.
Контроллер выполнен в виде металлического корпуса, внутри которого находится печатная плата с электронными компонентами. Жгут проводов от датчиков, исполнительных устройств и бортовой сети автомобиля подключается к блоку управления многополюсным штекерным разъемом.
Блок управления двигателем состоит из:
- процессорная часть (микроЭВМ);
- формирователи входных и выходных сигналов;
- источник питания.
Процессорная часть ЭБУ
Здесь происходит все самое главное в работе "мозгов" двигателя. Основой процессорной части является однокристальная микроЭВМ. Она называется так из-за того, что большинство компонентов микропроцессорной структуры находятся на одном кристалле микросхемы (чипе). В контроллерах СУД используются 8-, 16- или 32-разрядные микроЭВМ. Разрядность - это количество бит информации, с которыми она оперирует. Основные компоненты микроЭВМ.Центральный процессор. Производит выборку команд и данных из памяти программ и памяти данных, производит арифметические и логические операции над данными, управляет сигналами на внутренней шине адреса и данных.
Постоянное запоминающее устройство (ПЗУ). То место, где хранится программа и данные в виде констант. Программа - переведенная на язык машинных кодов микроЭВМ совокупность всех алгоритмов управления СУД. Данные - калибровочные таблиц константы, которые участвуют в процессе расчетов или выбираются как управляющие параметры. Для разных типов СУД, использующих одинаковые контроллеры, записывается своя программа или свой набор данных.
Информация в ПЗУ может храниться сколь угодно долго, независимо от того, работает контроллер или хранится на складе. Для записи программы и данных используются специальные устройства, которые называются программаторами.
Оперативное запоминающее устройство (ОЗУ). Область памяти, где хранятся данные, которые в процессе работы изменяются. Это могут быть промежуточные результаты вычислений или значения, полученные от датчиков. В отличие от ПЗУ, информация в ОЗУ теряется после выключения питания контроллера.
Чтобы сохранить данные, которые накапливаются в процессе работы контроллера и участвуют в расчетах как параметры адаптации алгоритмов к конкретному двигателю, в контроллерах существует так называемое энергонезависимое ОЗУ. Оно запитывается от отдельного источника питания, подключаемого непосредственно к аккумуляторной батарее. В режиме хранения это энергонезависимое ОЗУ потребляет очень незначительное количество энергии, что не может привести к разряду батареи, так как ток потребления в этом случае сравним с током саморазряда.
Недостатком такого типа энергонезависимого ОЗУ является то, что процесс адаптации возобновляется каждый раз после отключения питания от аккумулятора. Для устранения этого недостатка в современных контроллерах СУД используют новый тип энергонезависимого ОЗУ, который для хранения информации не требует никакого дополнительного источника питания.
АЦП - аналогово-цифровой преобразователь. Однокристальная микроЭВМ не может работать с аналоговыми сигналами, поэтому в АЦП происходит дискретная выборка мгновенных значений непрерывного аналогового сигнала и преобразование их в цифровой код.
Порты ввода/вывода. Служат для организации взаимодействия микроЭВМ с другими компонентами контроллера. Через них происходит считывание входных и выдача выходных сигналов и информации.
Таймеры/счетчики - это устройства, необходимые для измерения интервалов времени или подсчета числа событий.
Генератор тактовой частоты. Вырабатывает тактовые импульсы синхронизации работы всей системы. От точности его работы зависит точность измерения всех интервалов времени.
Формирователи входных сигналов
Сигнал от датчика - это не что иное, как преобразованное в электрический сигнал значение физической величины (например, температуры охлаждающей жидкости). В контроллере СУД этот сигнал проходит через формирователь, где происходит согласование уровней (усиление или ослабление) - преобразование до той величины, которая необходима для нормальной работы процессорной части. Кроме того, входные формирователи выполняют защитную функцию от перенапряжения. Различают формирователи дискретных, аналоговых и частотных сигналов.Дискретные сигналы - это сигналы, значение которых во времени меняется скачкообразно. Например, сигнал включения зажигания или сигнал запроса кондиционера. Такие сигналы поступают после преобразователей напрямую в процессорную часть на входы портов ввода/вывода.
Аналоговые сигналы - это сигналы, значение которых во времени непрерывно меняется. Например, сигнал с датчика массового расхода воздуха или с датчика положения дроссельной заслонки. Эти сигналы после предварительной обработки поступают в процессорную часть на входы АЦП.
Частотные сигналы - это сигналы, частота изменения которых несет информацию об изменении физической величины, измеряемой датчиком. Например, частота сигнала с датчика положения коленвала пропорциональна скорости вращения двигателя. Для дальнейшей обработки таких сигналов важно, чтобы эти сигналы не имели импульсных помех. Во входном формирователе частотный сигнал ограничивается по амплитуде (амплитудное значение такого сигнала не несет необходимой информации) и поступает в процессорную часть на вход таймера/счетчика.
Формирователи выходных сигналов
Эти формирователи преобразуют сигналы с портов ввода/вывода процессорной части в сигналы достаточной мощности для непосредственного управления исполнительными устройствами.
Выходные формирователи - это современные микросхемы (драйверы), которые, кроме основных функций, усиления по мощности, еще выполняют функции защиты выходов контроллера от замыкания на массу или на плюс батареи, а также от перегрузки. Эти драйверы называют “интеллектуальными”, так как в случае ненормальной работы, когда срабатывают защитные функции, они информируют процессор об этом. В контроллере используются различные типы формирователей выходных сигналов в зависимости от необходимой мощности.
Формирователь канала диагностики необходим для согласования уровней электрических сигналов диагностического оборудования с уровнями сигналов процессора.
Источник питания ЭБУ
Поскольку процессорная часть и микросхемы формирователей имеют рабочее напряжение питания +5 вольт, в электронном блоке управления предусмотрен источник питания. Он выдает стабильное напряжение при изменении напряжения в бортовой сети в широком диапазоне. Просадка напряжения до 6 вольт во время холодного пуска двигателя с не полностью заряженной батареей не приводит к отключению контроллера СУД.
Электронный блок управления двигателем ВАЗ 2114 – это своеобразное устройство, которое можно охарактеризовать как мозг тачки. Через этот блок в машине абсолютно все работает – от маленького датчика до движки. И если устройство начинает барахлить, то машина попросту встанет, ведь ей некому командовать, распределять работу отделов и так далее.
Чтобы не было путаницы, сразу пояснение: электронная система управления движки, или мозги, контроллер, а так же прошивка, аббревиатура ЭБУ и ЭСУД, процессор в тачке – все это одно и тоже!
Чтобы узнать, где находится ЭБУ на ВАЗ 2114, нужно заглянуть под торпеду приборной панели (центровую), естественно, предварительно сняв все крепления кожуха торпеды (если стало интересно прям сей час посмотреть на электронный блок – крестовая отвертка вам в помощь).
Но смотреть местоположение блока вам будет бесполезно, если вы не знаете, что такое эбу и как он работает. Принцип работы прошивки на четырнадцатой – это не такой уж сложный процесс, с одной стороны, с другой – он собирает во едино всю систему двигателя, подвески, КПП. Но привязан он больше к движке. С того момента, как вы завели свою машину, мозг вашей тачки начинает работу по сбору инфы, которая поступает со всех датчиков, что только есть на четырнадцатой, потом он ее обрабатывает и распределяет работу системы двигателя согласно поступившей информации.
ЭБУ на ВАЗ 2114 собирает данные с таких датчиков:
- Положения коленвала
- Массового расхода воздуха
- Температуры охлажденки
- Положения дросселя
- Детонации
- Кислорода
- Скорости
Это основной список, могут стоять тюнинговые примочки или пара-тройка других датчиков (в зависимости от комплектации), но все они всегда будут напрямую работать с ЭБУ ВАЗ 2114. С помощью этой инфы контроллер регулирует работу следующих систем:
- Система топливной подачи – все, что связано с работой бензонасоса, давлением и форсунками
- Зажигание
- Адсорбер
- Работу движки на холостом ходу
- Работа радиатора
- Самодиагностика
Мозги на ВАЗ 2114, чтобы все успевать, состоят из трех видов памяти:
- Отдел с постоянной памятью, которую можно запрограммировать (ППЗУ – программное постоянное запоминающее устройство). Это и есть то, что мы называем прошивкой, в этот отдел можно закачать основную программу для работы электронного блока. Программа содержит основу: калибровки и алгоритмы для управления движкой. Плюсы этого отдела памяти, что он постоянен и не сотрется в момент резкого обрыва питания. Такой момент как чип-тюнинг связан именно с этой памятью.
- Отдел с оперативной памятью, которая хранит в основном всплывающие ошибки системы и те настройки параметров, которые могут измениться в зависимости от ситуации (ОЗУ – оперативное запоминающееся устройство). Если выключить питание, все, что было зафиксировано этим отделом памяти – пропадет.
- Отдел памяти с кодами против угона (ЭРПЗУ – электрически репрограмируемое запоминающее устройство). В этом отделе содержится инфа о паролях сигналки, с которой сверяется иммобилайзер при каждом пуске движки.
Так как производство четырнадцатых проходило на протяжении нескольких лет, модернизация касалась и свойств контролера. По сему ЭБУ на ВАЗ 2114 бывает нескольких видов.
Одним из самых первых электронных блоков был «Январь 4» и «GM 09». Они ставились на первые Самары 2, начиная с 2000 года. Модификация включала в себя наличие или отсутствие резонансного датчика детонации.
Модельный ряд достаточно широкий, внизу приведены версии мозга с нормой токсичности и основными характеристиками.
Уже в 2003 году четырнадцатые стали оснащать усовершенствованными мозгами (которые, кстати подходили и на тринадцатую, и на пятнадцатую) – это «Январь 5.1х». этот контроллер выпускали в трех вариациях, касаемых впрыска топлива: одновременный впрыск, впрыск попарно-параллельный и фазированный.
Кстати, этот тип мозгов хорошо сходится по параметрам с «VS (Ителма) 5.1» или «BOSCH M1.5.4», что позволяет взаимозаменять отечественную прошивку на иностранную. Ниже представлены модели всех трех линеек мозгов.
Блок управления ВАЗ 2114, представленный разными моделями одной линейки, будет выстроен на единой базе, а модели будут отличаться разве что коммутацией форсунок или подогреве ДК.
На «Январь»:

На «BOSCH»:

Bosch MP7.0
С Бош не все так просто. Например, существует такая прошивка от производителя как «BOSCH MP7.0». На рынке автозапчастей ее только на разборке (и то днем с огнем) можно найти, а так она ставился еще на заводе – штатная – в единичном объеме. Разъем имеет стандартного плана – на 55. Хорошо поддается перекроссировке.
Bosch M7.9.7
Или такой мозг – «BOSCH M7.9.7». Его выпускают с конца 2003 года. У него нестандартный разъем, что затрудняет его замену на другие прошивки. Это более западный, навороченный электронный блок с нормой на Евро 2 и 3, хоть его разъем уникален, ко конструктивно исполнен качественнее (имеется коммутатор) своих конкурентов и предшественников. Да и весит он меньше.
Наверное, единственный доступный аналог отечественного производителя бошевскому М7.9.7 является «Январь 7.2». этот контроллер изготовлен с другим качеством проводки – он 81 контактный, его можно попробовать заменить с бошевским, хотя, на практике все равно возникают нестыковки. Делают эти контроллеры на Ителме и Автэле, а по характеристикам это сиквел Январь-5.

То же самое, но для объема 1,6:

Январь 7.2 — V1.6
Январь 7.3
И самой последней модификацией отечественного Января стал электронный блок «М 7.3», его еще называют Январь 7.3, но это некорректно. Именно его чаще всего можно встретить на современных четырнадцатых, так как его ставили с 2007 года. Производили его хорошо – норма Евро 3 даже на Евро 4 можно было натянуть, делали все там же: на Ителме и Автэле. Ниже смотрите основные характеристики этой прошивки на движку 1,6 с 8 – ми клапанами.

А теперь возвращаемся к вопросу, как узнать, какой ЭБУ стоит на ВАЗ 2114. Точнее, теперь вы можете это сделать, элементарно посмотрев номер вашего контроллера и отыскав его в каком-либо из списков. Если бы четырнадцатая обладала бортовиком, он бы вам выдал номерок блока, но о таких диковинах даже пятнашке через раз мечтать приходится, по сему, отодвигаем кожух и лезем внутрь, смотреть номер воочию.
Система управления двигателем ВАЗ 2114 легко поддается диагностике и без наличия бортовика, сгодится обычный ноут с нужной программой. Диагностика вещь хорошая, помогает прочесть выскочившие ошибки и натолкнуть на мысли, как сделать ремонт ЭБУ своими руками. Дело не хлопотное, особенно, если учесть, сколько стоит ЭБУ на ВАЗ 2114 – в среднем 5000 рублей.
Ремонт контроллера часто связывают с таким процессом как прокачка (чип-тюнинг, прошивка прошивки и т.д.). Процедура нужна прежде всего для того, чтобы увеличить мощность движки. Можно, конечно, придумать турбину, но можно обойтись и малой кровью – скачанный с интернета софт обойдется бесплатно, а эффект точно будет.
То есть, тюнинг коснется алгоритма работы двигателя внутреннего сгорания. Видов как это сделать, какие программы использовать и какие параметры выставлять – всего этого очень много. Например, можно сделать расход бенза стандартным при любых обстоятельствах, но тогда и кайф от разгона упадет. А можно повысить мощь силовой установки: тогда четырнадцатая будет кушать немного больше бенза, но и выдавать заслуженную скорость.
Можно еще поколдовать с моментом зажигания или сделать так, чтобы ваша Самара кушала бенз меньшего октанового числа, а ездила с прежним качеством. Эти два последних пункта спорные в отношении износа деталей, да и на практике чаще всего автовладельцы хотят добавить мощи тачке, чтобы резво входила в повороты и динамично разгонялась.