Среди задач полного привода — три «драйвовых», дарящих позитивные эмоции водителю, и одна технологическая.
- Повышение проходимости (от парковки в городских сугробах до действительно тяжелых внедорожных условий).
- Повышение управляемости (в основном на твердых покрытиях).
- Повышение динамики (лучшая устойчивость при более быстром разгоне).
- Упрощение конструкции (!) — в частности, для гибридных автомобилей.
При этом крайне важно помнить, что хотя полный привод едет намного лучше, чем монопривод, тормозит-то он точно так же . То есть — на 4WD нужно думать головой и помнить, что ощущение вседозволенности, скажем, на льду имеет четкий физический предел.
Как тут не вспомнить лучший нативный 4WD: коробка автомат, привод на все копыта, кожа, подогрев, навигация, голосовое управление, прекрасная экологичность… ;)
Известный миф о повышенном расходе топлива на полноприводных автомобилях можно прокомментировать следующим образом. В практике эксплуатации машина с постоянным полным 4WD потребляла примерно поллитра лишнего бензина на сотню относительно такой же моноприводной. Эти лишние поллитра уходили как на бОльшую массу перемещаемого железа (лишние 70 килограмм), так и на трансмиссионные потери в раздатке, кардане, заднем мосту. В случае жестко подключаемого привода разница может быть существенно больше, как в силу технологического несовершенства трансмиссии (низкого качества материалов и деталей), так и в силу затрат энергии на деформацию покрышек и разрушение трансмиссии (см. ниже, «part-time 4WD»).
[свернуть]
Каким бывает полный привод
Раскрыть...
Прежде всего, что в повороте все колеса машины проходят различное расстояние. Эта особенность является для полного привода определяющей. И чем длиннее база автомобиля, тем заметней разница (тем бОльший путь проходит передняя ось в поворотах).

Соответственно, любой полный привод требует строго одинаковой размерности резины на всех колесах. Вспоминаем, что «докатка» обычно другой размерности, и при проколе движемся на шиномонтаж очень медленно и печально под угрозой сломать трансмиссию;)
Также не забудем, что гидротрансформатор в гидромеханических АКПП при трогании с места работает как демультипликатор (понижающая передача) с коэффициентом примерно 1.9, поэтому полноприводная машина с механикой и с автоматом — это две большие разницы (а полноприводник с «роботом» или — это вообще сплошное недоразумение, т.к. ни робот, ни вариатор не способны переварить заметную нагрузку при трогании с места).
Подключаемый 4WD (part-time)
Раскрыть...
Самый дешевый и самый бесполезный вид полного привода. В том смысле, что единственное его применение — действительно тяжелые внедорожные условия, а единственные плюсы — способность переносить большую нагрузку и предельная дешевизна. В составе такого вида привода могут применяться либо размыкающая муфта на одной из полуосей (см. картинки ниже), понижающие передачи и межколесные блокировки, а сам привод может подключаться как механически, так и дистанционно (электро-, гидро- или пневмоприводом). Принципиально важно, что вторая ведущая ось подключается при этом не дифференциалом, а простой механической муфтой (не пакетом фрикционов, которые греются и горят, а механическим зацеплением шестерен!).


4WD типа part-time категорически нельзя использовать на твердых покрытиях ввиду резкого ухудшения управляемости машины и риска поломать трансмиссию. Теоретически, такой привод может быть полезен на льду (на мокрой дороге и в снегах, т.е. когда покрытие допускает проскальзывание колес), но при этом проблема управляемости также никуда не девается. Кроме того, все виды part-time в силу жесткого характера подключения второй ведущей оси выполняют подключение со значительной задержкой и часто требуют для подключения-отключения полной остановки автомобиля (а то и ручной возни с хабами на колесах).
Соответствие part-time 4WD задачам полного привода:
- повышение проходимости — прекрасное
- повышение управляемости — отсутствует ;
- повышение динамики — отсутствует ввиду падения управляемости при включенном 4WD (тронешься-то быстро, а дальше что?);
- упрощение конструкции — хорошее (проще только гибридный разомкнутый привод, см. ниже).
Заметим, что специфически внедорожные приемы, типа выползания из ямы «враскачку», здесь не рассматриваются — иначе у нас не было бы Бога, кроме механической коробки передач и старины-УАЗа;) Мы все же говорим про нормальных людей, живущих не в сибирских глущобах.
Еще раз, по буквам: part-time 4WD в заблокированном состоянии резко снижает поворачиваемость машины , т.е. повышает ее устойчивость на прямой, но крайне затрудняет повороты. Желающие ездить в таком режиме по твердому покрытию могут посчитать разницу механической энергии передней и задней оси в повороте среднего радиуса на скорости хотя бы 60 км/ч (а это почти 17 метров в секунду) и осознать, что вся эта энергия идет на разрушение покрышек и трансмиссии. Выводы — самостоятельно.
[свернуть]
Автоматически подключаемый 4WD (on-demand)
Раскрыть...
Исторически данный вид привода возник как решение задачи «а пусть вторая ось подключается к двигателю сама!», причем максимально дешевыми средствами — т.к. технологически постоянный полный 4WD весьма дорог. По мере развития технологий on-demand 4WD эволюционировал от сравнительно дешевого, но и сравнительно бесполезного механического устройства, через различные (иногда сложные и дорогие) пневматические и гидравлические механизмы к современному, достаточно совершенному виду.

Конструктивно все on-demand системы устроены как «вторая ось, через муфту подключаемая к первой», т.е. межосевой дифференциал в них отсутствует и при срабатывании привода передняя и задняя оси соединены жестко с возможным проскальзыванием. Т.к. качество работы on-demand привода драматически зависит от скорости срабатывания межосевой блокировки (а также от возможности превентивного ее срабатывания), вполне закономерным выглядит переход практически всех современных on-demand приводов на быстрые электромагнитные и (намного реже) электрогидравлические муфты.


Использование до сих пор такого сложного и дорогого устройства, как гидравлическая муфта, обусловлено отсутствием до сих пор электромагнитных муфт, обеспечивающих и плавное включение с переменной степенью блокировки (что крайне важно для управляемости), и быструю достаточную блокировку при отсутствии перегрева. По сути, это технологическая проблема с компактными электромагнитами достаточной мощности. Все фрикционные муфты утилизируют проскальзывание в тепло и перегреваются при отсутствии охлаждения. Так, on-demand 4WD на Mitsubishi Outlander XL («сухая» электромагнитная муфта с проскальзыванием и степенью блокировки 70%) практически бесполезна вне дорог из-за постоянного перегрева. В то же время, фирменная система (X-Trail, или её аналог TOD на Pathfinder) достаточно хорошо держит перегрев и является лучшим примером в среде on-demand 4WD. При этом переход на электрогидравлические муфты с простых гидравлических или вязкостных обусловлен необходимой скоростью срабатывания при хорошем усилии сжатия. Электрогидравлика умеет блокироваться и распускаться по командам блока управления, в то время как традиционная гидравлика (например, Honda DPS) или вискомуфта срабатывает только при наличии заметного проскальзывания между осями (ведущая ось успевает сделать половину оборота и закопаться), не может постоянно держать высокую степень блокировки и «не умеет» распускаться при работе ABS.
Помимо межосевой муфты и дифференциалов на осях (возможно, блокируемых), on-demand 4WD может интегрироваться с тормозной системой («электронные блокировки» колес), а также с рулем и педалью газа (возможность превентивно блокировать и распускать межосевую муфту, в зависимости от ситуации). Также для компенсации недостаточной скорости срабатывания и степени блокировки применяются муфты с механическим преднатягом (Haldex на Volvo, второе поколение DPS на Honda).
Точно так же, как и в случае part-time 4WD, принудительная блокировка трансмиссии on-demand 4WD на твердых покрытиях категорически запрещается . Поскольку, в отличие от механической блокировки в part-time, on-demand использует нежные фрикционные муфты, конец трансмиссии в таком режиме придет гораздо раньше и наглядней.
Ввиду значительного разброса конструкций, технологий, скоростей срабатывания и степени блокировки, а также ввиду стремления производителя получить «как можно больше 4WD» при минимальной себестоимости обобщить качества on-demand 4WD можно лишь приблизительно:
- подавляющее большинство систем 4WD, рекламируемых и продаваемых как «постоянный полный привод» («realtime 4WD») на самом деле относятся к типу on-demand и не обеспечивают всех преимуществ постоянного 4WD . Примеры — Honda (кроме Pilot), Volvo, Kia, Mitsubishi (кроме Outlander первого поколения и трансмиссии SuperSelect на Pajero), Nissan, Toyota RAV4 (с третьего поколения) и т.д.;
- часть on-demand систем нельзя воспринимать иначе, как недоразумение (DPS первого поколения на Honda, ненадежный и грубый on-demand на Kia Sorento первого поколения, очень грубая электромагнитная муфта на первом Kia Sportage), в то время как «дорогие» версии (Nissan All Mode 4×4-i, BMW xDrive) вплотную приближаются к «дешевым» full-time 4WD;
- ключевой фактор, по которому все on-demand системы можно условно разделить на «хорошие» и «плохие» — это умение превентивно подстраиваться (блокироваться и распускаться) под команды водителя (повороты руля, нажатия педали газа) с одновременным использованием «электронных блокировок» колес (что позволяет как нивелировать негативные эффекты жесткой связи между осями, так и сводить проскальзывание межосевой муфты к минимуму).
Соответствие обычного («плохого») on-demand 4WD задачам полного привода:
- повышение проходимости — среднее (запаздывает с подключениями, не обеспечивает полную блокировку);
- повышение управляемости — отсутствует из-за запаздываний;
- повышение динамики — отсутствует (за редкими исключениями);
- упрощение конструкции — средне (чем хуже привод, тем проще и дешевле).
Соответствие «превентивного» («хорошего») on-demand 4WD задачам полного привода:
- повышение проходимости — хорошее , как на автомате, так и на механике (при наличии понижающей передачи);
- повышение управляемости — удовлетворительное («хорошее» при наличии «электронных блокировок» на колесах);
- повышение динамики — хорошее ;
- упрощение конструкции — средне (чем лучше привод, тем сложнее электроника).
Неудивительно, что при современном развитии автомобильных технологий основную перспективу производители видят в электронноуправляемых электромагнитных муфтах. Они дешевы в производстве, просты в монтаже и настройке и обеспечивают приемлемое качество управления автомобилем. Если, конечно, человек ранее не управлял настоящим постоянным полным 4WD ;)
[свернуть]
Постоянный 4WD (full-time)
Раскрыть...
Что тут скажешь. Лучшее, о чем может мечтать человек. Но, к сожалению, такие системы технологически дороги, т.к. включают в себя межосевой дифференциал с ручной или автоматической блокировкой. Ведь если машину оснастить тремя свободными дифференциалами (два межколесных и один межосевой) вообще без блокировок, то при проскальзывании единственного колеса вся тяга будет передаваться именно на него, и такая машина не сможет сдвинуться с места.
Как правило, на тяжелых внедорожниках дополнительно системе постоянного полного привода используются блокировки межколесных дифференциалов, понижающие передачи в раздатке, опциональное отключение одной из осей (например, SuperSelect), часто — «электронные блокировки» колес. Конкретную конструкцию той или иной трансмиссии рассмотрим в отдельной статье. Но в самом простом виде постоянный полный привод выглядит как межосевой дифференциал с вискомуфтой, распределяющий момент в соотношении 50/50 по осям:

Важная ремарка . Хотя постоянный полный привод с распределением момента 50/50 («симметричный») наилучший с точки зрения устойчивости, часто применяют и другие распределения (55/65 на Suzuki Grand Vitara, 40/60, 30/70 у Mercedes-Benz — «для сохранения заднеприводного характера автомобиля»). В любом случае, в распределении момента речь идет о ситуации, когда все колеса находятся на твердом покрытии . Иными словами, шестеренки в дифференциале устроены как рычаги, которые при прочих равных передают момент таким вот образом. Стоит любому колесу «разгрузиться», как в зависимости от условий момент будет мгновенно перераспределен по остальным колесам.
Автомобили с постоянным полным приводом являются эталоном с точки зрения управляемости под тягой, особенно в сложных условиях (снег, лед, лужи, песок), их крайне трудно «уронить». Под тягой они легко держат недоступные моноприводам траектории, вдвое легче стартуют с места (физику не обманешь — сила трения покоя та же, а сила, срывающая колесо в скольжение, вдвое меньше) и очень устойчивы даже при аквапланировании (т.к. при «всплытии» одного колеса не происходит никаких рывков — вторая ось продолжает ровно толкать машину). Кроме того, по опыту эксплуатации, резина на таких машинах изнашивается заметно медленнее даже при динамичной езде (т.к. энергия двигателя равномерно распределяется по всем колесам, а не только по одной ведущей оси).
Таким образом, full-time 4WD так соотносится с задачами полного привода:
- повышение проходимости — среднее (а при наличии межколесных блокировок — прекрасное );
- повышение управляемости — прекрасное ;
- повышение динамики — прекрасное ;
- упрощение конструкции — отсутствует (самая сложная конструкция).
Следует отметить, что некоторые модели автомобилей с постоянным полным приводом (например, Jeep Grand Cherokee 1999 модельного года) имеют варианты трансмиссии с тремя дифференциалами переменной степени блокировки (два межколесных и один межосевой), что позволяет автомобилю выезжать из грязи «на одном колесе», т.е. передавать в сложных дорожных условиях весь момент на единственное загруженное колесо. Круче этого в мире полного привода не бывает вообще ничего.
[свернуть]
Гибридный 4WD (механически незамкнутый)
Раскрыть...
Появление электромоторов в качестве вспомогательных движителей (в частности, на гибридных машинах) породило схему полного привода, при которой ведущая ось от двигателя внутреннего сгорания у автомобиля только одна (как правило, передняя), а на вторую ось ставится электромотор, управляемый электроникой так, чтобы его тяга соответствовала работе основного ДВС. Такая схема исключает дифференциалы и карданный вал и потому является достаточно «дешевой» в реализации (насколько вообще бывает дешевым гибридный автомобиль). Если же поставить на колеса раздельные электромоторы, то из конструкции исключается сама вторая ось и дифференциал на ней.

По такой схеме реализованы некоторые версии праворульного Nissan March (на рисунке выше), а также печально знаменитый Lexus RX450h (слабая тяга электромоторов на задней оси не дает ему возможности забираться на уклоны, легко одолеваемые обычным полноприводным RX).
Очевидно, при дальнейшем развитии электроники и электротяги надобность в дифференциалах и карданных валах отпадет, т.е. именно к этой схеме неизбежно придет автомобилестроение в будущем. Но случится это отнюдь не завтра:)
Гибридный 4WD так соотносится с задачами полного привода:
- повышение проходимости — так себе (схема не предназначена для внедорожных нагрузок);
- повышение управляемости — прекрасное (из-за возможности «тонкой» корректировки электротяги);
- повышение динамики — прекрасное (момент электродвигателя тем выше, чем ниже обороты);
- упрощение конструкции — прекрасное .
[свернуть]
[свернуть]
Альтернативы полному приводу
Раскрыть...
Помимо создания в том или ином виде привода «на все копыта», некоторые производители применяют компромиссное решение — ручную или автоматическую блокировку колес одной ведущей оси. Это позволяет в значительной степени убрать проблемы с управляемостью «обычного» монопривода на сложных покрытиях (т.к. сглаживаются рывки при проскальзывании одного из колес) и повысить проходимость до уровня простой «парковки в сугробе».
Примеры таких решений:
- Mazda3 MPS с передним самоблоком;
- Volvo 850 с принудительной блокировкой переднего дифференциала на скорости до 40 км/ч.
Понятно, что в этом случае повышение проходимости, устойчивости и динамики не сказать чтобы большое — но ведь и конструкция проще некуда:)
» Что такое 4WD на машине и что необходимо знать о полном приводе
4WD — что такое полный привод на машине, разбираемся
Автомобили бывают разные. Одни были созданы исключительно для движения по дорогам с твердыми покрытием. Другие – для преодоления более сложных ландшафтов. Не случайно, в инструкции по эксплуатации обычных легковых автомобилей указан их класс – дорожный. С автомобилями, имеющими полный привод все гораздо сложнее.
Для обозначения привода, была принято обозначение колесной формулы следующим образом. Например, колесная формула 4Х4 обозначает количество ведущих колес к их общему количеству. Ведущими называют колеса, на которые подается крутящий момент от двигателя. Также полноприводные машины обозначают 4WD , что буквально означает привод на четыре колеса.
Разумеется, трансмиссия 4WD машины конструктивно куда более сложная, чем автомобиля, имеющего передний или задний привод. Казалось бы, сделать внедорожный автомобиль 4WD довольно просто. Но, это не так.
Чтобы распределить крутящий момент от коробки передач к ведущим мостам, необходим еще один агрегат – раздаточная коробка. С ее помощью крутящий момент распределяется на все ведущие оси. Распределение крутящего момента – ключевая функция полноприводной трансмиссии. Вместе с тем, все автомобили с полным приводом 4WD, конструктивно отличаются друг от друга. наиболее часто встречаются автомобили как с постоянным полным приводом (Full time ), так и с подключаемым (Part time ). Поговорим о них более подробно.
Жесткий подключаемый полный привод (Part time) 4WD.
Самое простое решение для автомобиля 4WD – прямое подключение всех ведущих мостов. Такой тип трансмиссии сравнительно прост и надежен. Крутящий момент, поступает через коробку передач к раздаточной коробке, а от нее через шарнирные приводы к дифференциалам мостов. Усилие от двигателя непосредственно распределяется на передний и задний мост практически в равном количестве.
В результате, величина крутящего момента как на задних, так и на передних колесах становится практически равной. Такое распределение момента существенно повышает проходимость. Автомобиль может преодолевать существенное бездорожье.
Для увеличения крутящего момента дополнительно в трансмиссию 4WD вводится еще одна понижающая передача, называемая демультипликатором. При включении понижающей передачи, автомобиль существенно теряет в скорости, зато увеличивается тяга на колесах, что еще больше повышает проходимость. Для движения по рыхлому снегу, а также по вязким почвам рекомендуется включение понижающей передачи.
Такая конструкция лежит в основе всех классических 4WD внедорожников – тяжелых автомобилей, имеющих жесткую рамную основу и зависимую, часто, рессорную подвеску с неразрезными балками мостов. Конструкция классического 4WD внедорожника является фактически повторением конструкции автомобилей с американской маркировкой «general purpose », что в буквальном переводе означало: «автомобиль общего назначения». Позднее, это словосочетание трансформировалось в ставший нам привычным «джип» (Jeep).
Повышенной проходимости способствует не только полный 4WD привод на все колеса с дополнительной понижающей передачей. Успешному преодолению бездорожья во многом способствует удачное распределение веса автомобиля по осям, а также жесткая рама и конечно же, высокая и мощная подвеска, в которой вертикальное перемещение обоих колес жестко связано между собой.
Все это способствует хорошим внедорожным качествам. Если в автомобиле используются межколесные самоблокирующиеся дифференциалы, его проходимость повышается еще больше. Большинство «классических» внедорожников представляют собой автомобили с мощными двигателями, высокой посадкой и внушительными габаритными размерами. Такие автомобили способны преодолеть серьезное бездорожье, снежные заносы и даже переехать неглубокие водоемы без сильного течения.
Наряду с известными преимуществами, классические внедорожники 4WD имеют и ряд существенных недостатков. Главным из них является, как ни странно, жесткий полный привод. Все дело в том, что крутящий момент распределяется в равной степени между осями автомобиля. При некоторых условиях угловые скорости передних и задних колес не всегда бывают одинаковыми
И если при движении по рыхлому грунту это компенсируется пробуксовкой колес, то при движении по твердому и ровному дорожному покрытию в трансмиссии будут возникать опасные пер узки. Например, при прохождении поворотов, из-за разности давления в шинах или неравных угловых скоростях карданных шарниров, в трансмиссии внедорожника возникают крутильные колебания, в результате которых механизмы легко выходят из строя.
Чтобы этого не произошло, один из ведущих мостов, чаще передний, имеет возможность отключения от трансмиссии 4WD. Если вы двигались по бездорожью и решили выехать на дорогу с асфальтовым покрытием, прежде чем двигаться по дороге, вы должны отключить одну из ведущих осей. Многие отечественные и зарубежные модели 4WD внедорожников для уменьшения механических потерь оснащаются специальными муфтами, при помощи которых передние колеса подключаются к трансмиссии.
Некоторые модели имеют вакуумный или электромагнитный привод колесных муфт. Исходя из этого, такой тип автомобилей называют «part time 4WD». Повышенный расход топлива – еще один существенный недостаток внедорожников. Тяжелая рамная конструкция, чугунные балки мостов, большие механические потери обуславливают повышенный топливный аппетит таких автомобилей.
Достоинства 4WD:
- повышенная проходимость,
- простота и надежность конструкции,
- жесткая конструкция.
Недостатки 4WD:
- высокий расход топлива,
- повышенные потери мощности,
- необходимость отключения одной из ведущих осей,
- высокий центр тяжести (склонность к опрокидыванию).
Постоянный полный привод (Full time) 4WD.
Со временем прогрессивная конструкция внедорожников стала уступать место более легким моделям 4WD автомобилей, которые обладали не менее выдающимися внедорожными качествами. Со временем отпала необходимость в жесткой раме. А колесная подвеска стала полностью независимой. Претерпела изменение и конструкция трансмиссии. Для того, чтобы подключить полный привод 4WD, необходимо было полностью остановить автомобиль, затем подключить колесные муфты, а уж после переводить рычаг включения моста.
Конструкция постоянного полного привода 4WD полностью исключает все эти операции, поскольку крутящий момент передается на обе оси. Это стало возможным, благодаря введению в трансмиссию еще одного элемента – межосевого дифференциала. Межосевой дифференциал напоминает конструкцию колесного дифференциала планетарного типа.
Устройство способно распределять крутящий момент между осями по принципу наименьшего сопротивления. Если передняя ось автомобиля испытывает большее сопротивление движению, крутящий момент автоматически перебрасывается к задней оси. Такая компоновка трансмиссии позволила полностью отказаться от необходимости отключения одной из ведущих осей.
Автомобиль с постоянным полным приводом стал более маневренным и устойчивым к заносу при прохождении поворотов на высокой скорости. Вместе с тем, на бездорожье привод full time 4 WD был бы полностью бесполезен, поскольку при пробуксовке колес на одной из осей, другие остаются недвижимы, поскольку весь крутящий момент переходит на буксующее колесо. Чтобы справиться с этой задачей, в трансмиссию было введено управление блокировкой межосевого дифференциала, также называемое «diff-lock» .
В зависимости от марки и модели автомобиля, механизм блокировки дифференциала (diff-lock) может иметь рычажный, вакуумный или электромагнитный привод. Благодаря подобной компоновке полноприводной 4WD трансмиссии, появилась возможность ее установки на более легкие автомобили, имеющие несущий кузов и как продольное, так и поперечное расположение силового агрегата. Автомобили с продольным расположением двигателя имеют компоновку трансмиссии, во многом схожую с «классическими» внедорожниками.
Более интересна конструкция с поперечной компоновкой мотора. Обычно, коробка передач, раздаточная коробка и межколесный дифференциал передней оси собраны в один агрегат. Привод на заднюю ось выполнен в виде углового редуктора, внутри которого и расположены элементы межосевого дифференциала. Такая конструкция 4WD хотя и утяжеляет массу автомобиля, но более компактна по сравнению с аналогичными типами трансмиссии.
В результате, автомобиль 4WD способен одинаково хорошо передвигаться практически на любом покрытии. Конструкция full time 4WD легла в основу многих моделей гибридных внедорожников, называемых кроссоверами. В отличие от «классики», многие модели кроссоверов имеют несущую конструкцию кузова и полностью независимую пружинную подвеску. При этом они способны передвигаться как в плотном городском потоке, так и на легком бездорожье. Главное условие движения с заблокированным дифференциалом (diff-lock on) не рекомендуется разгоняться выше 60 км/ч и двигаться не более 2-х часов.
Вместе с тем, жесткая блокировка дифференциала сегодня стала такой же архаичной, как и зависимая подвеска. Наряду с межосевым дифференциалом или вместо него, часто применяется вязкостная муфта (вискомуфта). Принцип ее работы во многом схож с гидротрансформатором в АКПП. Между дисками, жестко соединенными с трансмиссией, находится специальная жидкость.
При незначительном различии угловой скорости передней и задней осей жидкость допускает проскальзывание дисков друг относительно друга. при пробуксовке одной из осей, жидкость разогревается, в результате чего ее плотность резко повышается. В результате, крутящий момент передается через жидкость к неподвижной оси. Вискомуфта позволяет блокировать межосевой дифференциал автоматически в нужный момент. Недостатком ее является склонность к пер еву. Поэтому, преодолевать тяжелое бездорожье в течение длительного времени на 4WD автомобилях с вязкостной муфтой не рекомендуется.
Современные 4WD автомобили оснащаются более совершенными устройствами блокировки. В них вязкостная муфта заменена многодисковой фрикционной муфтой, работающей по принципу сцепления. Управляется муфта электроникой. Электронное устройство отслеживает угловые скорости колес и распределяет крутящий момент на неподвижные. В отличие от жесткой блокировки, такой механизм позволяет распределить крутящий момент более дозировано. Благодаря электронному управлению, 4WD автомобили стали еще более проходимыми и устойчивыми даже на скользком дорожном покрытии.
Достоинства 4WD
- универсальность,
- возможность движения,
- как по твердому покрытию,
- так и по бездорожью,
- лучшая управляемость.
Недостатки 4WD
- сложность конструкции,
- увеличение массы деталей трансмиссии,
- повышенный расход топлива (для full time 4 WD с жесткой блокировкой дифференциала).
Все о вариаторе на Пежо Крутящий момент и мощность двигателя — в чём отличие Привод на Пежо — снятие и установка Рейтинг моторов, двигателей Двигатель nfu TU5JP4 1.6 л. Пежо
Среди водителей особой популярностью пользуются внедорожники и кроссоверы, и на многих из них присутствует одно из упомянутых обозначений. По умолчанию всеми это воспринимается как маркировка полноприводного автомобиля, обладающего возможностью передачи на все колеса крутящего момента, что обеспечивает ему проходимость по любым дорогам. В общем-то, это верно, но, как говорится, тонкости кроются в деталях, а именно они порой определяют особенности поведения автомобиля; в данном случае будет затронут вопрос, чем отличается 4WD от AWD?
Общие сведения о полном приводе
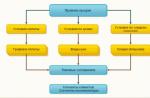
Обычный автомобиль является моноприводным, крутящий момент поступает только на передние или только задние колеса. Здесь, наверное, для лучшего понимания надо воспользоваться приведенным ниже рисунком, показывающим особенности трансмиссии, характерные для вездехода.
Главной особенностью подобной трансмиссии (в отличие от моноприводных машин) является наличие раздаточной коробки. Благодаря ей между осями автомобиля распределяется в установленном изготовителем соотношении крутящий момент. Конечно, одно только наличие подобного элемента трансмиссии не делает автомобиль вездеходом, но полного привода при отсутствии раздатки просто не бывает.
Существует несколько отличающихся вариантов его реализации, но наиболее востребованными являются следующие:
- Part time 4WD. Так называется подключаемый (при необходимости) полный привод, все остальное время автомобиль движется как самый обычный. Использование подобной системы возможно только кратковременно, ее применение на сухом и ровном покрытии обеспечивает повышенный износ трансмиссии и выход из строя.
- Full time 4WD. Так обозначается постоянный привод на все колеса, когда крутящий момент всегда распределяется между мостами в установленном изготовителем соотношении. Автомобиль с подобным типом привода может двигаться по любому покрытию, но для получения действительно внедорожных возможностей он должен быть оснащен дополнительными блокировками, например блокировкой межколесного и межосевого дифференциалов.
- AWD – полный привод, включающийся автоматически. Бортовой компьютер или элементы трансмиссии (вискозная муфта) сами определяют момент проскальзывания колес и дополнительно подключают другой мост.
Конечно, приведенное описание достаточно краткое и неполное, но оно позволяет понять, как реализуется режим полного привода.
А какой из них лучше?
Зная особенности популярных типов полного привода, уже можно подумать о достоинствах и преимуществах каждого. Сейчас в первую очередь нас интересует, в чем разница между 4WD и AWD и что они вообще собой представляют. Как уже упоминалось, это практически одно и то же. 4WD – общее обозначение привода на все колеса, и часто оно подразумевает возможность вручную обеспечить подачу крутящего момента на один из мостов (незадействованных), обеспечив автомобилю повышенную проходимость, тогда как AWD – подключаемый (автоматически) привод на все колеса (или же постоянный).
Однако во многих случаях указанное различие не соблюдается, и как изготовители, так и различные СМИ могут подразумевать или вкладывать в любую из упомянутых аббревиатур совсем другой смысл. Использование того или иного варианта полного привода должно основываться не на каких-то буквах и символах, а на конкретных технических характеристиках и условиях эксплуатации машины.
Что выбрать?
Если вы задумались о приобретении полноприводного автомобиля и еще не решили, что выбрать, ориентироваться надо именно на предназначение машины. Скажем так, существуют различия в управлении переднеприводным и заднеприводным автомобилями. На эту тему исписаны горы бумаги и выданы тысячи рекомендаций. Но вот как поведет себя полноприводный автомобиль в той или иной дорожной ситуации, зачастую предсказать достаточно сложно.
Рассмотрим самый простой пример – скользкая дорога, может, идет дождь либо образовался легкий гололед или накат. У вашего автомобиля – AWD по действующей терминологии. В обычных условиях машина переднеприводная. Вы входите на скользкой дороге в поворот, в этот момент вдруг срабатывает AWD, условия движения изменились и автомобиль отправляется в занос. Хорошо, если вы его сможете удержать и избежите ДТП.
С другой стороны, привод, который включается водителем вручную, хорош именно на бездорожье, когда приходится преодолевать серьезную грязь, причем он сам по себе без специальных блокировок не может обеспечить свободного прохождения по подобной дороге. Так что отличие 4WD от AWD проявляется не только в их различных конструктивных исполнениях, но и в поведении машины, оснащенной разными типами трансмиссий.
Если попытаться определить, какой полноприводный автомобиль выбрать, то для охоты и рыбалки, активного отдыха, когда приходится преодолевать бездорожье, лучше всего подходит машина с постоянным или в крайнем случае подключаемым вручную полным приводом (при наличии дополнительных блокировок). Тогда как условиям движения в городе, в том числе на скользкой и занесенной снегом дороге, больше соответствует AWD. Хотя выбор всегда остается за вами, и это будет именно ваше решение.
Организация полного привода может быть реализована разнообразными способами, и даже наличие на автомобиле шильдика 4WD или AWD вовсе не означает, что перед вами настоящий вездеход, которому подвластны любые дороги. Если вы озабочены приобретением настоящего джипа, то выбор необходимо производить исходя из условий его эксплуатации и тех дорог, по которым придется проезжать.
Содержание
Первая редакция настоящей статьи была написана осенью 1992 года. Тогда, также как и сейчас, ощущался значительный недостаток информации об автомобилях с постоянным полным приводом и их отличиях от традиционных внедорожных автомобилей с отключаемым полным приводом . Предыдущие редакции статьи были дополнены информацией о последних разработках в этом направлении. Настоящая статья получила очень хорошие отзывы в сети Интернет.
Очень важно с самого начала определиться с терминологией поскольку для любого четырехколесного транспортного средства AWD и 4WD означают в общем одно и то же. Говоря обобщенно AWD подразумевает постоянный или автоматически подключаемый полный привод , а 4WD - полный привод, подключаемый и отключаемый вручную . В автомобильной индустрии эта терминология обычно соблюдается, но не во всех случаях. Так например новоиспеченные AWD Ford Tempo и Subaru Justy на самом деле являются автомобилями с ручным подключением полного привода, как и более ранняя Subaru GLs . Существует еще достаточно двусмысленный термин - полный привод, подключаемый при необходимости (on demand four wheel drive), который может означать либо автоматически подключаемый полный привод, либо полный привод, подключаемый и отключаемый вручную.
Автомобильная пресса несет на себе большую часть ответственности за путаницу в этом вопросе. Ошибки подобного рода встречаются довольно часто и вызваны неаккуратным использованием этих двух терминов.
В настоящей статье вышеупомянутые термины используются свободно. Там, где это необходимо вносятся дополнительные уточнения.
Дифференциалом называется набор шестерен, который распределяет крутящий момент приходящий от трансмиссии между двумя исходящими валами. У переднеприводных или заднеприводных автомобилей он позволяет обоим ведущим колесам вращаться с различными скоростями для того, чтобы автомобиль мог поворачивать без сопротивления.
Полноприводные системы постоянного действия должны иметь три дифференциала которые передают мощность ко всем четырем колесам и обеспечивают поворот без сопротивления - это передний, задний и центральный дифференциалы. Центральный дифференциал необходим, потому что расстояние, которое проходят в повороте передние поворачиваемые колеса не равно расстоянию, проходимому задними колесами.
Мощность отбираемая у коробки передач распределяется центральным дифференциалом между приводными валами идущими к переднему и заднему дифференциалам. Полноприводные системы с ручным подключением полного привода как правило не имеют центрального дифференциала поэтому их использование на сухой дороге связано с определенными неудобствами. Когда полный привод включен передняя и задняя ось связаны напрямую и будут вращаться с одинаковыми скоростями. Поэтому разница скоростей вращения между передними и задними колесами в повороте будет обеспечиваться за счет проскальзывания покрышек, что приводит к повышенному их износу.
Является основным камнем преткновения в технологии полного привода поскольку оказывает огромное влияние на поведение автомобиля на дороге. Если рассмотреть простейший пример AWD с тремя "свободными" дифференциалами, то становится ясно, что автомобиль может быть обездвижен при потере сцепления хотя бы одного из четырех колес. Особенностью простого "свободного" дифференциала является то, что он перераспределяет мощность в пользу оси, имеющей меньшее сопротивление. Таким образом если одно колесо теряет сцепление с дорогой вся развиваемая мощность передается на него. При этом полноприводный автомобиль имеет вдвое больше шансов потерять сцепление одного ведущего колеса с дорогой, чем автомобиль с приводом на одну ось. А поскольку использование полноприводного автомобиля предполагает более частую езду в плохих дорожных условиях для него становится очень важным наличие какой-либо блокировки дифференциалов. Все автомобили с постоянным полным приводом предлагающиеся на рынке сегодня такую блокировку имеют. Для лучшего понимания этой концепции стоит проследить эволюцию полноприводных систем с самого начала до современных высокотехнологичных образцов.
Audi был первым автопроизводителем, который успешно начал продавать автомобили с постоянным полным приводом под торговой маркой quattro с 1981 года в Европе и с 1983 года в США. (В США этот автомобиль более известен под именем Turbo quattro Coupe , а в мире под названием Ur quattro). Эти автомобили добились больших успехов в ралли, выиграли несколько титулов в мировых первенствах и поразили мир автомобильной промышленности поскольку до этого полноприводная схема никогда не ассоциировалась с высокими техническими характеристиками. Хотя еще в 1966 году появился Jensen FF с постоянным полным приводом и антиблокировочной системой тормозов он не имел коммерческого успеха и оставил Audi честь совершить технический переворот в общественном мнении и оставить свое имя в истории как родоначальника постоянного полного привода.
В восьмидесятых годах руководство Audi приняло решение оснастить полным приводом и присвоить имя quattro всей выпускаемой гамме моделей. Первое поколение quattro имело простые блокировки центрального и заднего дифференциалов, которые жестко блокировали один или оба дифференциала (не допуская разных скоростей вращения) для преодоления самых сложных дорожных ситуаций. Когда центральный дифференциал заблокирован, то для обездвиживания автомобиля необходимо, чтобы сцепление с дорогой потеряли одно переднее и одно заднее колесо. При двух заблокированных дифференциалах для обездвиживания необходима потеря сцепления уже трех - двух задних и одного переднего - колес. Блокировки на этих моделях Audi включались и выключались вручную, что было не очень удобно, поскольку требовало от водителя дополнительного внимания. Как выяснилось многое водители забывали выключать блокировки после преодоления трудных участков.
Дальнейшие разработки постоянного полного привода двигались в направлении автоматически блокируемых дифференциалов. Первой появилась вязкостная муфта (в дальнейшем - ВМ), в корпусе которой находилась специальная силиконовая жидкость, которая позволяла поддерживать небольшую разницу скоростей вращения между двумя осями, но увеличение проскальзывания приводило к резкому увеличению вязкости этой жидкости, которая блокировала муфту. Было изобретено два совершенно разных способа применения вискомуфты в полноприводной трансмиссии.
Некоторые производители использовали обычные дифференциалы в паре с ВМ, которая при необходимости автоматически блокировала дифференциал. Такая схема используется в трансмиссии современных Mitsubishi Eclipse GSX и полноприводных Subaru с ручной коробкой передач, а так же снятых с производства BMW325ix и полноприводной Toyota Celica turbo .
В процессе разработки полноприводной трансмиссии инженеры Audi тоже пытались использовать ВМ, но совершенно другим образом. В их схеме автоматически отключаемого полного привода ВМ использовалась вместо центрального дифференциала. В этом случае автомобиль в основном имеет передний привод и незначительная разница скоростей вращения между передней и задней осью в повороте корректируется работой ВМ. При проскальзывании колес передней оси разница скоростей вращения увеличивается до того момента, когда ВМ начинает передавать часть крутящего момента на заднюю ось и автомобиль становится полноприводным. Разница между этой схемой и предыдущей в том, что в первом случае мы имеем постоянный полный привод с автоматической блокировкой дифференциала, а во втором - автоматически включаемый и отключаемый полный привод.
Такая система никогда в последствии на использовалась в автомобилях Audi , но была взята на вооружение фирмой Volkswagen , которая выпустила на рынок полноприводную схему Syncro . Простота этой схемы привела к тому, что она использовалась большим количеством производителей в огромном диапазоне моделей - от минивэнов до такой экзотики, как современные Porsche 911 Turbo и Carrera 4 и Lamborghini Diablo VT (они, конечно имеют постоянный привод на задние колеса). Самая свежая версия полного привода от Volvo тоже построена по этой схеме с необычной примесью устройств ограниченного трения - система управления тягой (traction control) в передней оси и механический дифференциал ограниченного трения - в задней. Некоторые автомобильные издания нашли эту систему не совсем доведенной.
Следующим этапом было использование дифференциала Torsen (от TORque SENsing - чувствительный к моменту) в конструкции второго поклоения quattro. В конце семидесятых, в процессе разработки первой схемы quattro специалисты Audi даже вели переговоры с владельцем патента на ВМ - FF Development , но впоследствии схема с ВМ была отклонена по причинам, которые станут понятными дальше.Дифференциал Torsen был изобретен американской фирмой Gleason Сorp. , имел все достоинства ВМ и не имел ее недостатков. Это полностью механическое устройство, работа которого основана на принципе червячной передачи, а подробное описание выходит за рамки настоящей статьи. Однако его характеристики достаточно интересны. В нормальных условиях Torsen распределяет крутящий момент в пропорции 50:50. Но если колеса одной из осей начнут проскальзывать момент начнет перераспределяться в пользу оси, колеса которой имеют лучшее сцепление с дорогой, другими словами работа дифференциала Torsen прямо противоположна работе обычного дифференциала. Максимальное достижимое перераспределение момента - 80:20 в зависимости от шага червячной передачи. А поскольку конструкция Torsen полностью механическая процесс блокировки происходит моментально в отличие от ВМ, которой нужно некоторое время, пока жидкость "схватится". Поэтому Torsen более чувствителен к пробуксовке, чем ВМ. Процесс блокировки Torsen имеет более прогрессивную характеристику. (Инженеры Porsche отказались от ВМ в трансмиссии 964 Carrera 4 потому, что ВМ имеет экспоненциальную, а не линейную характеристику блокировки, чем объясняется ее худшая управляемость).
Еще более важным преимуществом Torsen является то, что он не блокируется и не пытается выровнять разности скоростей при торможении позволяя всем четырем колесам вращаться независимо при отсутствии тяги. Torsen блокируется только под тягой в то время, как ВМ и под тягой и при ее отсутствии. Torsen реагирует на крутящий момент, в то время как ВМ на обороты.
Реакция ВМ на обороты вызывает много инженерных проблем. Антиблокировочная система тормозов, например, определяет начало блокировки одного из колес по разнице скоростей вращения всех четырех колес. Наличие в трансмиссии механизма, который пытается выровнять скорости вращения всех четырех колес создает серьезные проблемы для АБС.
Для преодоления этой проблемы инженеры вынуждены идти на разные ограничения. Специалисты Mitsubishi отложили внедрение АБС на первом поколении модели GSX , а в дальнейшем АБС и ВМ в заднем дифференциале ограниченного трения стали взаимоисключающими опциями. В системе VW Syncro полный привод при нажатии на педаль тормоза просто отключался посредством второго сцепления. Подобную же особенность имеет большинство других автомобилей использующих схожую схему с ВМ. Доходило даже до того, что управляющий компьютер победителя мирового чемпионата по ралли Lancia Delta Integrale увеличивал крутящий момент двигателя, чтобы уменьшить сопротивление ВМ при торможении. В самых примитивных системах использовалась обгонная муфта. В результате с одной стороны при торможении полный привод отключался, с другой - он не работал при движении задним ходом.
Самым простым способом уменьшения сопротивления ВМ было уменьшение эффективной вязкости жидкости. Это в свою очередь означает, что уменьшится эффективность блокировки ВМ, что в принципе приемлемо для автомобилей, эксплуатирующихся преимущественно в нормальных дорожных условиях. В общем привлекательность ВМ не в ее высоких характеристиках, а в простоте и дешевизне.
В конце восьмидесятых Porsche и Mercedes вывели на рынок системы полного привода различавшиеся по своей степени сложности. Система 4Matic фирмы Mercedes использовала датчики АБС для определения проскальзывания колес. На нормальном сухом покрытии Mercedes был нормальным заднеприводным автомобилем. Когда сенсоры АБС определяли начало скольжения колес задней оси они выдавали на управляющий процессор сигнал заблокировать гидравлическую многодисковую муфту, передающую тягу на переднюю ось. Степень блокировки изменялась процессором по прогрессивной характеристике. Когда процессор определял необходимость в еще больших сцепных качествах он посылал управляющий сигнал на вторую муфту, блокирующую задний дифференциал. При нажатии на педаль тормоза обе муфты разъединялись одновременно для того, чтобы обеспечить песперебойную работу АБС.
Таким образом Mercedes 4Matic представляет собой систему автоматически подключаемого полного привода. Причина, по которой Mercedes пошел на разработку такой сложной системы заключалась по словам представителей фирмы в том, что они не хотели отпугнуть своих почитателей постоянным полным приводом, который по причине передачи части крутящего момента на переднюю ось может "изменить традиционное ощущение от управления Mercedes". Можно также предположить что Mercedes не мог себе позволить использовать более простую схему, чем Audi , которая на рынке занимает более низкую позицию. Практически же система 4Matic работала не лучше и не хуже других систем постоянного полного привода, но ее стоимость и сложность снижали ее привлекательность. Сейчас Mercedes отказался от такой системы и новые полноприводные машины, включая перспективный M класс оборудуются постоянным полным приводом. А система, подобная первой версии 4Matic нашла свое применение на автомобиле Nissan Skyline GTR .
Инженеры Porsche использовали в конструкции модели 959 подобную Mercedes (но иным способом реализованную) схему с дополнительными муфтами, где центральный дифференциал (в общем то просто гидравлическая муфта) был заблокирован постоянно, и разблокировался только для облегчения парковки. Распределение момента у Porsche 959 изменялось в зависимости от нагрузки и дорожных условий при помощи переменной степени блокировки муфты с прогрессивной характеристикой. В этой системе в отличие от всех других схем полного привода распределение момента не зависело от проскальзывания ведущих колес. В любой другой системе полного привода момент распределяется в постоянной пропорции до тех пор пока не наступает проскальзывание колес, после чего различные механизмы ограниченного трения изменяют эту пропорцию. В Porsche 959 компьютер системы полного привода получал информацию из многих источников, включая положение заслонки, угол поворота руля, ускорения и даже датчика давления турбонаддува. При движении по прямой с максимальным ускорением система отдавала до 80% тяги на задние колеса (при нормальном распределении 40% впереди 60% сзади) даже если все четыре колеса вращались с одинаковой скоростью. Эта система была наиболее сложной и изощренной среди всех когда либо сконструированных систем полного привода.
После 959 пришла модель 964 , которая была представлена в 1989 году как 911 Carrera 4 . Представители Porsche заявляли, что ее система полного привода была дальнейшим развитием системы, применявшейся в 959 и соответственно более передовой. Но на самом деле это была система с постоянным раздаточным соотношением, такая же как все остальные, с компьютерным управлением муфтами, используемыми в качестве устройств ограниченного трения. Изюминкой этой системы было то, что совместное использование датчиков скорости и ускорения и управляемой компьютером блокировки заднего дифференциала было призвано предотвращать свойственную 911 модели чрезмерную избыточную поворачиваемость при добавлении газа в повороте. Когда компьютер определял неминуемость заноса задней оси задний дифференциал начинал блокироваться. Таким образом благодаря использованию системы полного привода с "умными" дифференциалами инженерам Porsche удалось превратить бенгальского тигра в котенка. В общем то это и было главной причиной внедрения системы полного привода в конструкцию 911 , поскольку Porsche 911 с ее распределением веса в пользу задней ведущей оси не очень то нуждалась в увеличении сцепления.
В 1993 году инженеры Porsche представили совершенно новую конструкцию задней подвески для модели 911 . Заднеприводная версия стала вполне управляемой и необходимость сложной компьютеризованной системы полного привода отпала. Полноприводная версия этой машины (модель 993 ) имеет более простую, легкую и дешевую автоматически подключаемую систему полного привода с ВМ, похожую на ту, которая используется в VW Golf Syncro и большинстве минивэнов. Тем не менее "умный" задний дифференциал, который победил чрезмерную избыточную поворачиваемость этой машины был сохранен для подавления любых рецидивов этой особенности. Новый Porsche 911 (996) С4 с двигателем водяного охлаждения оборудован почти такой же системой, как та, что использовалась на 993 C4 , но с дополнительной системой обеспечения устойчивости, управляемой компьютером. Это несколько разочаровывающая ситуация, в которой Porsche - некогда беспорный лидер в этом вопросе до сих пор оборудует свои полноприводные версии вязкостной муфтой, в то время как многие другие - VW Golf 4Motion и Jeep Grand Cherokee 1999 модельного года, например, перешли к более продвинутым системам.
Subaru так же заслуживает особого упоминания в этой статье, поскольку в трансмиссии моделей Legacy и Impreza (включая и Outback) с автоматической коробкой передач используется система полного привода с микропроцессорным управлением подобная Mercedes 4Matic , Audi A8/V8 с АКПП и ранним моделям Porsche . Использование такой сложной системы, которая к тому же хорошо себя зарекомендовала, в относительно недорогих автомобилях действительно впечатляет. В последнее время и другие автопроизводители приняли подобные системы на вооружение. Honda CR-V , VW Golf 4Motion 1999 модельного года и автомобили, построенные, как Audi TT , на его платформе оборудованы концептуально схожими полноприводными трансмиссиями.
В трансмиссии Audi V8 и A8 с АКПП также используется управляемая микропроцессором муфта, которая блокирует центральный дифференциал подобно описанным выше системам. Одной из причин использования такой схемы является то, что АКПП предоставляет готовый источник гидрожидкости под давлением, которая необходима для блокировки муфты. Эта система представляет собой первый успешный опыт Audi по совмещению автоматической трансмиссии с полноприводной схемой quattro. За исключением Audi A8 современные модели quattro с АКПП используют центральный дифференциал Torsen .
Несмотря на все технологическое разнообразие в восьмидесятых годах полноприводные автомобили в конечном итоге не оправдали себя в коммерческом плане и оставили сегмент рынка в котором прочно укрепились только Audi и Subaru . В конце восьмидесятых годов любой крупный автопроизводитель предлагал полноприводные версии своих автомобилей, что можно объяснить просто тогдашней модой. С тех пор многие из них переключились на производство высокоприбыльных автомобилей для активного отдыха (SUV - Sport Utility Vehicles). И была придумана более простая и дешевая альтернатива AWD .
Все АБС имеют датчики на двух или всех колесах, для определения разницы их скоростей вращения, чтобы компьютер мог вмешаться и ослабить тормозное усилие на заблокированном колесе. При помощи несложного расширения системы ее можно заставить притормозить проскальзывающее колесо и таким образом перераспределить тягу в пользу колеса с лучшим сцеплением. Более сложные системы могут уменьшить мощность двигателя, чтобы более эффективно препятствовать проскальзыванию ведущих колес. В общем системы управления тягой представляют из себя оптимизацию привода колес одной оси с использованием технологии АБС.
Современная версия Audi quattro четвертого поколения использует полный привод совместно с управлением тягой всех четырех колес. В нормальных условиях тяга распределяется между осями в соотношении 50:50 при помощи центрального дифференциала Torsen , который обеспечивает ограниченное проскальзывание между осями. Система управления тягой обеспечивает ограниченное проскальзывание между колесами одной оси. Таким образом, впервые в схеме quattro , автомобиль должен потерять сцепление всех четырех колес с дорогой для того, чтобы лишиться подвижности.
Предыдущее поколение quattro имело центральный дифференциал Torsen и ручную блокировку заднего дифференциала, которая автоматически отключалась при скоростях движения выше 15 миль/ час, чтобы помочь забывчивому водителю. Audi V8 quattro имела задний дифференциал Torsen и управляемую микропроцессором муфту (АКПП) либо Torsen (ручная КПП) в качестве центрального дифференциала.
Новый Mercedes ML320 (также, как и ML430 ) использует относительно простой вариант трансмиссии с тремя свободными дифференциалами и управлением тягой на всех четырех колесах. Такой вариант был подвергнут критике из разных источников, как неудовлетворительный. Главным недостатком полного привода на M классе является то, что тормозная система подвергается чрезмерным нагрузкам в сложных дорожных условиях. Инженеры фирмы Zexel рассчитали, что при использовании в этой системе центрального дифференциала Torsen, который будет действовать до начала проскальзывания колес использование тормозов системой контроля тяги снизится на более чем на 50%. Эти данные свидетельствуют, что Mercedes зашел слишком далеко в попытках снизить стоимость трансмиссии путем исключения из центрального дифференциала механизма чувствительного к моменту или устройства ограниченного трения.
Вопрос о распределении момента всегда был слегка запутанным. В общем распределение момента между осями в условиях, когда ни одно из колес не проскальзывает, остается постоянным у всех автомобилей с полным приводом (за исключением Porsche 959 ). Для автомобилей с постоянным полным приводом наиболее распространенным отношением является 50:50, хотя бывают и варианты 30+% - на переднюю ось, 60+% - на заднюю. Вторая пропорция обычно применяется на автомобилях, которые изначально были заднеприводными, в то время, как первая - на автомобилях изначально переднеприводных.
Для систем с подключаемым полным приводом с ВМ распределение момента обычно выбирается как 95% - на переднюю ось, 5% - на заднюю. В связи с этим существует мнение, что постоянно имея 5% крутящего момента на задней оси такие системы должны рассматриваться, как системы с постоянным полным приводом. Вне зависимости от весомости этого аргумента фактом является то, что основной причиной передачи части крутящего момента на заднюю ось является желание обеспечить некоторое скольжение в ВМ и тем самым поддерживать ее в состоянии начала блокировки, для того, что бы минимизировать ее "задумчивость" при начале скольжения передних колес. При такой схеме ВМ всегда "думает", что передние колеса слегка проскальзывают относительно задних, даже если все колеса вращаются с одинаковой скоростью, что достигается слегка различными отношениями главной передачи для передних и задних колес.
Стандартная идея о скольжении предполагает сценарий, когда одно или более колес проскальзывает при движении автомобиля на скользком покрытии. Существует тем не менее еще одна ситуация, которую нужно принимать во внимание, говоря о скольжении. Вспомним, что передние колеса в повороте проходят большее расстояние, чем задние. Таким образом устройству, ограничевающему трение в центральном дифференциале "кажется", что передние колеса проскальзывают по отношению к задним и это устройство перераспределяет момент в пользу задней оси. Для машин с большей долей веса, приходящейся на переднюю ось, как, например, Audi этот эффект позволяет увеличить поворачивающую силу на передних колесах. Такая небольшая оптимизация распределения момента позволяет Audi значительно уменьшить недостаточную поворачиваемость присущую Audi quattro первого поколения.
Рассмотрим Mercedes ML 320 где используется свободный центральный дифференциал и система контроля тяги на всех четырех колесах. Когда перед или зад полностью потеряют сцепление с дорогой система перебросит весь момент на другую сторону. Теоретически, если поднять заднюю часть автомобиля домкратом, то система передаст 100% крутящего момента на переднюю ось, превращая автомобиль в переднеприводный и наоборот. В действительности, поскольку контроль тяги просто повышает давление в соответствующем тормозном контуре, а не блокирует колесо полностью, на переднюю соь будет передаваться меньше, чем 100% момента.
Но самое главное - запомнить, что указанное для этого автомобиля распределение момента 37:63 в пользу задней оси действует только тогда, когда ни одно из колес не проскальзывает. В приведенном выше примере с поддомкрачиванием одной из осей система AWD с любым типом блокировки может теоретически изменить перераспределение момента с 50:50 (или любого другого) до 0:100 или 100:0 в зависимости от того, насколько полно осуществляется блокировка. Mercedes не указывает коэффициент блокировки, который обеспечивает система контроля тяги, поэтому невозможно сказать каков реальный диапазон перераспределения момента в предельных условиях. Системы с ручным подключением полного привода без центрального дифференциала, так же как и первые системы постоянного полного привода с ручными блокировками имеют диапазон распределения момента от 100:0 до 0:100. Эти экстремальные значения также означают, что между осями не допускается разницы скоростей, вот почему большинство современных систем никогда не достигают 100% перераспределения тяги. Коэффициент блокировки 80% позволит беспрепятственно обеспечить небольшую разницу скоростей между осями.
В случае, если система имеет полную блокировку центрального дифференциала это приводит к тому, что каждая ось должна иметь запас прочности, чтобы передать все 100% мощности, выдаваемой двигателем, хотя большую часть времени они не будут загружены более, чем на 50%. Это приводит к практически неубиенной трансмиссии срок службы которой может намного превысить срок службы автомобиля. Негативной стороной этой особенности является то, что удвоение вращающихся масс приводит к снижению разгонных показателей автомобиля, что становится особенно заметным для автомобилей с АКПП, так как они обычно имеют более высокую первую передачу.
Новейшие тенденции в развитии динамики автомобилей - использование систем управления курсовой устойчивостью, которые, используя уже существующее оборудование АБС и полного привода с микропроцессорным управлением, помогают оптимизировать сцепление автомобиля с поверхностью. Наиболее современные системы полного привода умеют изменять распределение мощности в соответствии со сцепными свойствами каждого из колес, что приводит к очень безопасному нейтральному поведению автомобиля при выходе из поворота под тягой. В то же время эти системы не работают, если водитель полностью отпустил педаль газа в повороте.
Вспомним, что Porsche победили подобную ситуацию используя задний дифференциал с прогрессивной блокировкой. В дополнение к этому новейшая 996 Carrera 4 умеет выборочно подтормаживать отдельные колеса, когда автомобиль управляется на пределе своих возможностей. К примеру для корректировки заноса задней оси подтормаживается внутреннее заднее колесо, а при сносе передней оси - внешнее переднее. Это происходит независимо от желания водителя. Такие системы уже стали появляться и на других более дорогих автомобилях и, несомненно, со временем станут такими же распространенными, как и АБС.
Многие потенциальные покупатели полноприводных автомобилей интересуются приводит ли большее количество "железа" к большим проблемам или значительному повышению расхода топлива. Мировая практика показывает, что системы постоянного полного привода не приносят никаких специфических проблем. Вероятность отказа дополнительных приводных валов и шестерен не более вероятности того, что восьмицилиндровый двигатель откажет только потому, что в нем в два раза больше цилиндров, чем в четырехцилиндровом. Это неплохая аналогия, потому что при распределении тяги между четырьмя колесами нагрузки на трансмиссию меньше.
Те схемы, которые основаны на использовании датчиков АБС для блокировки диффернциалов будут страдать от технических проблем не более, чем любой другой автомобиль оснащенный АБС.
На самом деле недоверие к постоянному полному приводу вызвано использованием автомобилей с ручным подключением полного привода, где делаются постоянные попытки упростить этот процесс при помощи различных автоматически блокирующихся ступиц и/ или разных дополнительных приспособлений. Системы постоянного полного привода проще по конструкции поскольку в нет необходимости в этих "упрощающих" приспособлениях и всех деталях, связанных с ними.
Обвинения в том, что автомобили с полным приводом расходуют много горючего справедливы только по отношению к системам с ручным подключением полного привода. Системы с постоянным полным приводом и центральным дифференциалом в отличие от систем с подключаемым полным приводом не приводят к чрезмерной деформации покрышек при повороте. Более того исследования Audi показали, что потери на сопротивление качению у автомобиля с приводом на одну ось превосходят потери вызванные большим весом и инерцией автомобилей с постоянным полным приводом.
Использование в трансмиссии автомобиля ручного включения полного привода приводит к значительным трудностям в настройке подвески. Для автомобилей с управляемыми передними колесами передние колеса в повороте должны проходить большее расстояние, чем задние. Из-за отсутствия центрального дифференциала задние колеса должны проскальзывать для выравнивания скоростей вращения и таким образом частично теряют сцепление с дорогой в повороте. При этом автомобиль получает излишнюю поворачиваемость, что для среднестатистического водителя не является безопасным. Для корректировки этого передним колесам придается большой положительный угол развала. В результате передние колеса имеют меньшее пятно контакта с дорогой и соответственно меньшее сцепление в повороте. И все это только для того, чтобы обеспечить автомобилю нейтральную поворачиваемость при включенном полном приводе. Когда полный привод отключен, что в общем-то является более частой ситуацией, автомобиль приобретает значительную недостаточную поворачиваемость, поскольку тенденция к проскальзыванию задних колес в повороте уменьшается. АБС в режиме полного привода, когда она бывает очень нужна, тоже будет отключена.
Нет необходимости приводить дополнительные аргументы, чтобы понять, что подключаемый вручную полный привод имеет массу недостатков по сравнению с постоянным или автоматически подключаемым полным приводом, которые способны динамически перераспределять тягу между осями в зависимости от того, какая из них имеет худшее сцепление с дорогой. Системы постоянного и автоматически подключаемого полного привода полностью предсказуемы и могут быть настроены под каждый конкретный автомобиль для достижения максимального эффекта.
Средний потребитель обычно имеет тенденцию недооценивать необходимость высокой управляеости. Выражение "Я не собираюсь участвовать в гонках на моей машине" можно услышать довольно часто. Тем не менее, если оценивать автомобиль, как средство передвижения нельзя не оценить его управляемость. Автомобиль с хорошей управляемостью, такой как перечисленные выше полноприводные модели, снижает трудность прохождения поворотов, делает этот процесс более предсказуемым. При этом среднестатистический водитель будет чувствовать себя более комфортабельно и уверенно, будет меньше снижать скорость при прохождении поворотов, что приведет к меньшим потерям крутящего момента и в свою очередь меньшим потерям энергии на очередное ускорение автомобиля. Другими словами такой автомобиль будет более энергетически эффективным. К сожалению такая точка зрения вообще никогда не рассматривается при обсуждении достоинств тех или иных схем.
К несчастью до сих пор нередко посредственные системы с ручным подключением полного привода используются в современных автомобилях для активного отдыха, что отнюдь не соответствует их высокой цене. С концептуальной точки зрения ничего не препятствует этим машинам иметь постоянный полный привод. По мнению автора основными причинами отсутствия прогресса на рынке малых грузовиков и автомобилей для активного отдыха являеюся безразличие к потребителю и отсутствие критики со стороны средств массовой информации.
Утверждение о том, что системы постоянного полного привода не способны работать в тяжелых внедорожных условиях так же успешно, как и устаревшие системы с отключаемым полным приводом далеко от истины. Range Rover к примеру начал оборудовать свои автомобили постоянным полным приводом с центральным дифференциалом с первой машины сошедшей с конвейера в 1976 году. И в трансмиссии военного Hummer вместо жесткого соединения осей используется Torsen дифференциал. Как известно внедорожные способности этих автомобилей не вызывают никаких сомнений.
Отдельно должен быть упомянут Jeep Grand Cherokee 1999 модельного года, который стал первым из производимых большой серией автомобилей для активного отдыха с намного более современной системой полного привода, чем имеют большинство его собратьев. Все три дифференциала Grand Cherokee имеют прогрессивную блокировку с гидравлическим приводом в результате чего трансмиссия этого автомобиля может передать весь крутящий момент к одному колесу, которое имеет наилучшее сцепление с дорогой. К сожалению эта очень современная система полного привода предлагается только, как опция и покупатели, которые сомневаются или не доверяют достижениям технологии могут купить автомобиль с обычной системой 4WD/AWD , которая не обязательно будет надежнее из-за большого количества выбираемых опций.
Audi и Subaru продолжают успешно завоевывать рынок со своими полноприводными моделями и активно участвуют в автоспортивных состязаниях, подтверждая правильность выбранного пути. В прошлогодней серии чемпионата кузовных автомобилей Audi A4 quattro добились больших успехов по сравнению с автомобилями с приводом на одну ось даже несмотря на весовые пенальти. В чемпионате мира по ралли успешно выступает Subaru Impreza Turbo . Mitsubishi Eclipse GSX не достигла большого успеха на рынке из-за того, что подавляющее большинство покупателей предпочли переднеприводную версию. Фанаты Porsche наоборот предпочитают полноприводной заднеприводную версию 911 .
Благодаря успеху автомобилей для активного отдыха рынок полноприводных автомобилей с высокими техническими характеристиками будет оставаться небольшим. Можно только надеяться, что конкуренция все-таки заставит производителей автомобилей для активного отдыха выйти на новый уровень технологии постоянного полного привода. Эта тенденция уже проявляется, правда не так быстро, как хотелось бы.
Новостью, взволновавшей всех любителей Audi стало то, что последняя модификация VW Passat базируется на механике Audi A4 . Поскольку для Passat используется удлиненная платформа A4 экономически более выгодным стало использование системы quattro для полноприводной версии VW вместо разработки оригинальной платформы с использованием системы Syncro . Таким образом Syncro из отдельной системы превращается просто в термин, выделяющий полноприводный VW Passat из ряда его собратьев с приводом на одну ось. Впрочем это не первый случай в истории двух фирм, когда VW использует механику quattro . В середине восьмидесятых в США продавался VW Quantum Syncro , который не только базировался на платформе Audi 4000 CS quattro , но и был оборудован специфичным для Audi пятицилиндровым двигателем, установленным продольно перед передней осью.
Для моделей 1999 модельного года VW изменил систему полного привода. Вместо ВМ в ней теперь будет использоваться управляемая компьютером муфта, разработанная шведской компанией Haldex. Одним из преимуществ такой системы будет ее упрощение, поскольку исчезает необходимость в дополнительном механизме, отключающем полный привод при торможении. Также становится возможным более точное распределение момента и больший диапазон распределения момента между передней и задней осями. "Братья" полноприводного VW Golf IV (получившего новое имя "Golf 4Motion ") по платформе - Audi TT и Audi A3 quattro будут оборудованы такой же системой, которая, тем не менее, остается системой полного привода с автоматическим подключением. Таким образом название quattro , которое долгое время имело специфическое значение теперь размывается в угоду маркетинговой целесообразности, что приведет к серьезной путанице в терминологии.
Усугубляя эту путаницу Subaru в течение долгого времени оборудует диаметрально различными системами одну и ту же модель в зависимости от типа трансмиссии. В моделях Legacy и Impresa с ручной КПП используется система постоянного полного привода с разделением тяги между осями 50-50 и ВМ. В некоторых моделях с АКПП используется автоматически подключаемая система с микропроцессорным управлением, а в ряде случаев и система постоянного полного привода с неравным распределением момента и микропроцессорным управлением блокировкой.
Mitsubishi продолжает продавать свою полноприводную модель GSX с дифференциалом ограниченного трения в задней оси и, одновременно, АБС, даже несмотря на то, что относительно низкие объемы продаж означают, что эта модель далека от прибыльности. Вообще новые технологии в системах АБС привели к тому, что появилась возможность их мирного сосуществования с ВМ. К примеру Porsche имеет разные спецификации АБС в зависимости от того какой привод имеет автомобиль.
- Избегайте автомобилей с системами полного привода, подключаемыми вручную вне зависимости от отсутствия или наличия любых "упрощающих" устройств.
- Избегайте гибридных систем с ручным переключением режимов постоянный/подключаемый полный привод.
- Автор рекомендует системы с постоянным или автоматически подключаемым полным приводом, которые превосходят все остальные с инженерной точки зрения.
- Большим плюсом является наличие дифференциала ограниченного трения в заднем приводе или системы управления тягой на 4-х колесах.
- All wheel drive high performance handbook, Jay Lamm, Motorbooks International, 1990
- "Four-father" Interview with Jorg Benzinger (Audi chief chassis engineer) Performance Car magazine March 1986, AGB Specialist Publications
- "Four sight" Interview with Friedrich Bezner (Porsche 964 project engineer) Performance Car magazine March 1989, AGB Specialist Publications
- "Inner vision" Interview with Fritz Naumann (Audi head of general vehicle development) Performance Car magazine March 1989, AGB Specialist Publications
- "Traction and Handling Safety Synergy of Combined Torsen Differential and Electronic Traction Control", R Platteau, B Guidoni, P Sacchettint, R Jesson, Paper presented in Autotech 95 C498/30/144
При выборе автомобиля типа паркетника поднимается вопрос о выборе привода в получаемой машине. Многие видели надписи на задней стороне машине в виде AWD, 2WD и 4WD. И большая часть знает, что это обозначение типа привода, и останавливают собственный выбор на 4WD. Но в чем сама сущность этих приводов и какие конкретно в них отличия, сообщит не каждый. Исходя из этого перед приобретением автомобили лучше выяснить, что значит AWD, 2WD и 4WD.
Будем разбираться совместно.
Описание AWD привода.
Совокупность AWD (all wheel drive) обозначает привод на все колеса. Совокупность содержится в том, что бортовой компьютер в зависимости от обстановки на дороге выбирает режим привода благодаря угловым скоростям каждого колеса.
Полный привод употребляется при проезде нехороших дорог, при заносе либо проскальзывании колес. Исходя из этого на хорошей дороге бортовой компьютер выбирает режим 2WD, т.е. привод лишь на два колеса, наряду с этим при проскальзывании одного из колес компьютер сразу же подключает полный привод. По окончании подключения полного привода компьютер определяет ось, на которую нужно передавать меньше крутящего момента, а на какую больше, и осуществляет это.
К недочётам полного привода AWD возможно отнести необходимость определения момента для подключения привода на все колеса.
Описание 4WD привода.
Совокупность 4WD, кроме этого как и AWD, обозначает привод на все колеса, а вдруг переводить дословно, то «привод на четыре колеса». В современных авто видятся два вида данного привода: part-time 4WD и full-time 4WD.
В первом варианте выбор привода осуществляется самостоятельно водителем — переключением особой раздаточной коробки.
В нее входят 2WD, 4WD повышенная и 4WD пониженная. По большей части шофер будет применять лишь 2WD, поскольку 4WD лучше не применять на сухой асфальтной дороге – это может привезти к повреждениям в механизме автомобили.
Недочётами таковой совокупности возможно назвать неудобство при осуществлении переключения на режим 4WD пониженную, поскольку для этого нужно снизить скорость либо по большому счету остановиться.
Переключение между режимами 2WD и 4WD повышенной возможно делать на ходу автомобиля.
Полный привод с заглавием full-time 4WD есть полным приводом, действующим неизменно. Этот вид привода действует независимо от дорожных условий и есть лучшим вариантом для водителей, ездящих по скользким дорогам либо сыпучим поверхностям.
Тут необходимо подчеркнуть, что при таком постоянном полном приводе в машине есть необходимой установка межосевого и межколесного дифференциалов – они необходимы для обеспечения лучшей управляемости и динамики авто при езде.
Описание 2WD.
В отличие от прошлых двух видов приводов, данный привод не на все колеса, а лишь на два: передние либо задние.
В случае если сравнивать обычный переднеприводный автомобиль и авто с приводом 2WD, то преимущества будут конкретно у 2WD. Растолковываю из-за чего.
У переднего привода при застревании в снегу буксует одно колесо, а второе стоит на месте, поскольку отсутствует блокировка дифференциала. В такой же ситуации у автомобили с приводом 2WD одно колесо будет буксовать, а второе на данной же оси будет работать – потому, как в 2WD ведущими являются два колеса сходу, а не одно.
Отличие AWD от 4WD.
Отличия у AWD и 4WD, как успели уже подметить, не большие. В первом привод выбирает бортовой компьютер, во втором – или шофер при помощи переключения рычага особой раздаточной коробки, или никто — полный привод будет постоянным. А вот отличий от них у привода на два колеса будет побольше.
Привод на четыре колеса (4WD и AWD) и привод лишь на два колеса (2WD) — это и имеется основное отличие этих совокупностей.
При пробуксовывании колеса в том же рыхлом снегу в 4wd – одно колесо будет буксовать, а остальные три будут вытягивать машину. В 2wd в такой же обстановки будут трудиться лишь два колеса на одной оси, т.е. одно колесо буксует, а второе на данной же оси копает.
Что выбрать?
На первый взгляд все легко — привод на четыре колеса будет лучше привода на 2 колеса.
Не торопитесь с выводами, поскольку имеется тут пара НО:
выбор вида привода обязан определяться местом жительства: в случае если дорога к вашему дому — это распутье, то тут и думать нечего — лишь полный привод, а вот если вы живёте в городе и редко выбираетесь за город и в чащу леса по нехорошим дорогам, то тогда лучше остановить собственный выбор на 2WD; обслуживание полного привода обходится значительно дороже из-за множества и сложной конструкции всяких механизмов; кроме дорого обслуживания полный привод ведет к большему расходу горючего, и из-за большей нагрузки на двигатель имеется большая вероятность вызвать поломки, исходя из этого в случае если вам нужен муниципальный автомобиль с редкими поездками в деревню либо на дачу, то смело выбирайте 2WD.