HC-SR501スペースセンサーの概要
焦電効果に基づく HCSR501 モーション (または存在) センサー モジュールは、BISS0001 チップ上に追加の電気絶縁を備えた 500BP PIR センサー (図 1) と、視野半径を拡大し、赤外線を増幅するために使用されるフレネル レンズで構成されています。信号(図2)。 このモジュールは、赤外線を放射する物体の動きを検出するために使用されます。 モジュールの検知素子は 500BP PIR センサーです。 その動作原理は焦電気に基づいています。 これは、温度が変化すると結晶内に電場が現れる現象です。センサーの動作は BISS0001 チップによって制御されます。 ボード上には2つのポテンショメータがあり、最初のポテンショメータを使用して物体検出距離(3〜7 m)が設定され、2番目のポテンショメータを使用してセンサーの最初の動作後の遅延(5〜300)が設定されます。秒)。 モジュールには L と H の 2 つのモードがあります。動作モードはジャンパを使用して設定します。 L モードはシングル動作モードで、移動物体が検出されると、2 番目のポテンショメータで設定された遅延時間の間、OUT 出力の信号レベルが High に設定されます。 この間、センサーは動く物体に反応しません。 このモードは、セキュリティ システムでサイレンに警報信号を与えるために使用できます。 H モードでは、動きが検出されるたびにセンサーがトリガーされます。 このモードは照明をオンにするために使用できます。 モジュールの電源を入れると校正が行われます。校正時間は約 1 分で、その後モジュールは動作可能になります。 センサーは、できれば開いた光源から離して設置してください。
図 1. PIR センサー 500BP

図 2. フレネル レンズ
仕様 HC-SR501
- 供給電圧: 4.5-20V
- 消費電流:50mA
- 出力電圧OUT: HIGH - 3.3 V、LOW - 0 V
- 検出間隔: 3-7m
- 発射後の遅延時間:5~300秒
- 視野角最大120
- 次の測定までのブロッキングタイム:2.5秒。
- 動作モード: L - 単一動作、H - 各イベントでの動作
- 動作温度 -20 ~ +80C
- 寸法 32x24x18 mm
赤外線モーションセンサーをArduinoに接続する
このモジュールには 3 つの出力があります (図 3)。- VCC - 電源 5 ~ 20 V;
- GND - グランド。
- OUT - デジタル出力 (0 ~ 3.3V)。

図 3. ピン割り当てと HC-SR501 のセットアップ
HC-SR501 モジュールを Arduino ボードに接続し (図 4 の接続図)、移動物体が検出されたときに音声信号とメッセージをシリアル ポートに送信する簡単なスケッチを作成してみましょう。 マイクロコントローラーによるトリガーを修正するには、入力 2 で外部割り込みを使用します。これは int0 割り込みです。

図 4. HC-SR501 モジュールを Arduino ボードに接続するための接続図
リスト 1 のスケッチを Arduino ボードにアップロードして、センサーが障害物にどのように反応するかを見てみましょう (図 5 を参照)。 モジュールを作業モード L に設定します。 リスト 1 // モーション/プレゼンス センサー HC-SR501 の概要のスケッチ // サイト // センサー出力を接続するための接点 #define PIN_HCSR501 2 // トリガー フラグ boolean flagHCSR501=false; // スピーカー接続ピン int soundPin=9; // 音声信号の周波数 int freq=587; void setup() ( // シリアルポートを初期化する Serial.begin(9600); // 割り込み処理を開始 int0attachInterrupt(0, intHCSR501,RISING); ) void loop() ( if (flagHCSR501 == true) ( //シリアルポートへのメッセージ Serial.println("Attend!!!"); // 5 秒間の音声信号tone(soundPin,freq,5000); // フラグをリセット flagHCSR501 = false; ) ) // 割り込み処理 void intHCSR501() ( // センサートリガーフラグを設定します flagHCSR501 = true; )

図 5 シリアル モニター出力
ポテンショメータを使用して、OUT 出力での信号の持続時間とセンサーの感度 (物体を固定する距離) を実験します。
使用例
保護されたオブジェクト上でモーション/存在センサーがトリガーされたときに SMS を送信する例を作成してみましょう。 これを行うには、GPS / GPRS シールドを使用します。 次の詳細が必要になります。- Arduino の UNO ボード
- GSM/GPRSシールド
- npnトランジスタ、例えばC945
- 抵抗470オーム
- スピーカー 8オーム 1W
- ワイヤー

図6. 接続図
センサーがトリガーされると、テキストメッセージを含むSMSを送信するプロシージャが呼び出されます。 10時アクション!!!電話番号に。 スケッチの内容をリスト 2 に示します。GSM/GPRS シールドは、SMS 送信モードで最大 2 A を消費するため、外部 12V 2A 電源を使用します。 リスト 2 // モーション/プレゼンス センサー HC-SR501 の概要を示すスケッチ 2 // センサーがトリガーされたときに SMS を送信する // site // センサー出力を接続するための連絡先 #define PIN_HCSR501 2 // トリガー フラグ boolean flagHCSR501 false; // スピーカー接続ピン int soundPin=9; // 音声信号の周波数 int freq=587; // ソフトウェアシリアル ライブラリ #include
よくある質問 FAQ
1. オブジェクトが動くとモジュールは動作しません- モジュールが正しく接続されているか確認してください。
- 検出距離はボリュームで設定します。
- ポテンショメータを使用して信号持続時間の遅延を調整します。
- ジャンパをシングル動作モード L に設定します。
今日のレッスンのトピックは、焦電効果に基づくモーション センサー (PIR、受動的赤外線モーション センサー) です。 このようなセンサーは、室内の動きを検出するためにセキュリティ システムや日常生活でよく使用されます。 たとえば、動き検出の原理は、玄関や浴室の照明の自動点灯に基づいています。 焦電センサーは非常にシンプルで安価で、設置やメンテナンスも気取らないものです。 ちなみに、動きを検出する方法は他にもあります。 今日、物体とその動きの軌跡を認識するためにコンピュータービジョンシステムがますます使用されています。 同じセキュリティ システムでは、レーザー検出器が使用されており、ビームを横切ると警報信号が発せられます。 生物の動きだけを検知できる熱画像センサーも使用されています。
1. 焦電型モーションセンサーの動作原理
焦電体は、温度が変化すると電場を生成する誘電体です。 焦電材料に基づいて、LHI778 や IRA-E700 などの温度センサーが製造されています。 このような各センサーには、反対の極性に接続されたサイズ 1×2 mm の 2 つの感知素子が含まれています。 後で説明するように、正確に 2 つの要素が存在することが動きの検出に役立ちます。 村田製作所のIRA-E700センサーはこんな感じです。 このレッスンでは、このような焦電センサーを備えた HC-SR501 モーション センサーを使用します。 上から見ると、焦電体は半球で囲まれ、いくつかのセグメントに分割されています。 この球体の各セグメントは、PIR センサーのさまざまな領域に熱放射を集中させるレンズです。 レンズとしてはフレネルレンズが使用されることが多い。
このレッスンでは、このような焦電センサーを備えた HC-SR501 モーション センサーを使用します。 上から見ると、焦電体は半球で囲まれ、いくつかのセグメントに分割されています。 この球体の各セグメントは、PIR センサーのさまざまな領域に熱放射を集中させるレンズです。 レンズとしてはフレネルレンズが使用されることが多い。  モーションセンサーの動作原理は次のとおりです。 センサーが誰もいない部屋に設置されていると仮定します。 各感応素子は一定線量の放射線を受けます。これは、それらの電圧が一定値であることを意味します (左の図)。
モーションセンサーの動作原理は次のとおりです。 センサーが誰もいない部屋に設置されていると仮定します。 各感応素子は一定線量の放射線を受けます。これは、それらの電圧が一定値であることを意味します (左の図)。  人が部屋に入るとすぐに、最初の要素の視野に入り、その要素に正の電気インパルスが現れます(中央の図)。 人が動くと、レンズを通した熱放射が 2 番目の PIR 素子に当たり、負のパルスが生成されます。 モーション センサーの電子回路は、これらの多方向パルスを記録し、人がセンサーの視野内に落ちたという結論を導き出します。 センサーの出力で正のパルスが生成されます (右図)。
人が部屋に入るとすぐに、最初の要素の視野に入り、その要素に正の電気インパルスが現れます(中央の図)。 人が動くと、レンズを通した熱放射が 2 番目の PIR 素子に当たり、負のパルスが生成されます。 モーション センサーの電子回路は、これらの多方向パルスを記録し、人がセンサーの視野内に落ちたという結論を導き出します。 センサーの出力で正のパルスが生成されます (右図)。 2. HC-SR501のセットアップ
このレッスンでは、HC-SR501 モジュールを使用します。 このモジュールは非常に一般的で、コストが低いため多くの DIY プロジェクトで使用されています。 センサーには 2 つの可変抵抗器とモードを設定するためのジャンパーがあります。 ポテンショメータの 1 つがデバイスの感度を制御します。 大きいほど、センサーはより遠くまで「認識」します。 感度は、検出されるオブジェクトのサイズにも影響します。 たとえば、犬や猫をトリガーから除外できます。 2 番目のポテンショメータは応答時間を調整します T
。 センサーが動きを検出すると、一定の長さの正のパルスを生成します。 T
。 最後に、3 番目のコントロールはセンサー モードを切り替えるジャンパです。 妊娠中 L
センサーがカウントしている T
最初の操作から。 バスルームの光を制御したいとします。 人が部屋に入るとセンサーが作動し、ライトがしばらくの間正確に点灯します。 T
。 期間の終わりに、出力信号は元の状態に戻り、センサーは次のトリガーを与えます。 妊娠中 H
センサーがタイミングを開始します T
動きが検出されるたびに。 言い換えれば、人間が動くとカウントダウンタイマーがリセットされます。 T
。 デフォルトでは、ジャンパは次の状態にあります。 H
.
2 番目のポテンショメータは応答時間を調整します T
。 センサーが動きを検出すると、一定の長さの正のパルスを生成します。 T
。 最後に、3 番目のコントロールはセンサー モードを切り替えるジャンパです。 妊娠中 L
センサーがカウントしている T
最初の操作から。 バスルームの光を制御したいとします。 人が部屋に入るとセンサーが作動し、ライトがしばらくの間正確に点灯します。 T
。 期間の終わりに、出力信号は元の状態に戻り、センサーは次のトリガーを与えます。 妊娠中 H
センサーがタイミングを開始します T
動きが検出されるたびに。 言い換えれば、人間が動くとカウントダウンタイマーがリセットされます。 T
。 デフォルトでは、ジャンパは次の状態にあります。 H
.
3. HC-SR501をArduino Unoに接続する
マイクロコントローラーまたはリレーに直接接続するために、HC-SR501 には 3 つのピンがあります。 次のようにそれらを Arduino に接続します。| HC-SR501 | GND | VCC | 外 |
| Arduino Uno | GND | +5V | 2 |
 レイアウトの外観
レイアウトの外観
 プログラムすでに述べたように、HC-SR501 センサーのデジタル出力は、トリガーされると高い信号レベルを生成します。 センサーが動きを検知した場合はシリアル ポートに「1」を送信し、そうでない場合は「0」を送信する簡単なプログラムを作成してみましょう。 const int movPin = 2 void setup() ( Serial.begin(9600); pinMode(movPin, INPUT); ) void loop()( int val =digitalRead(movPin); Serial.println(val); late(100); ) Arduinoにプログラムをロードしてセンサーの動作を確認してみます。 センサーの設定を微調整して、センサーの動作にどのような影響を与えるかを確認できます。
プログラムすでに述べたように、HC-SR501 センサーのデジタル出力は、トリガーされると高い信号レベルを生成します。 センサーが動きを検知した場合はシリアル ポートに「1」を送信し、そうでない場合は「0」を送信する簡単なプログラムを作成してみましょう。 const int movPin = 2 void setup() ( Serial.begin(9600); pinMode(movPin, INPUT); ) void loop()( int val =digitalRead(movPin); Serial.println(val); late(100); ) Arduinoにプログラムをロードしてセンサーの動作を確認してみます。 センサーの設定を微調整して、センサーの動作にどのような影響を与えるかを確認できます。 4. 人感センサーによる調光
次のステップは自動照明システムです。 部屋の照明を制御するには、回路にリレーを追加する必要があります。 フォトカプラに基づく保護を備えたリレー モジュールを使用します。これについては、レッスンの 1 つ (リレーに関するレッスン) ですでに説明しました。 注意!この回路は、220 ボルトのネットワークからランプを点灯します。 回路を家庭用電源に接続する前に、すべての接続を 7 回確認することをお勧めします。 回路図 レイアウトの外観
レイアウトの外観
 プログラム次に、センサーがトリガーされたときにリレーをオンにし、したがって部屋の照明をオンにするプログラムを作成しましょう。 const int movPin = 2; const int relPin = 3; void setup() ( Serial.begin(9600); pinMode(movPin, INPUT); pinMode(relPin, OUTPUT); ) void loop()( int val =digitalRead(movPin); if (val)digitalWrite(relPin, HIGH) ; elsedigitalWrite(relPin, LOW); ) Arduinoにプログラムをロードし、慎重に回路を家庭用ネットワークに接続し、センサーの動作を確認します。 結論モーションセンサーは私たちの周りにあります。 セキュリティシステムのおかげで、ほぼすべての部屋に設置されています。 私たちが発見したように、これらは非常に使いやすく、Arduino または Raspberry Pi プロジェクトに簡単に統合できます。 モーション センサーが役立つ状況と場所をいくつか紹介します。
プログラム次に、センサーがトリガーされたときにリレーをオンにし、したがって部屋の照明をオンにするプログラムを作成しましょう。 const int movPin = 2; const int relPin = 3; void setup() ( Serial.begin(9600); pinMode(movPin, INPUT); pinMode(relPin, OUTPUT); ) void loop()( int val =digitalRead(movPin); if (val)digitalWrite(relPin, HIGH) ; elsedigitalWrite(relPin, LOW); ) Arduinoにプログラムをロードし、慎重に回路を家庭用ネットワークに接続し、センサーの動作を確認します。 結論モーションセンサーは私たちの周りにあります。 セキュリティシステムのおかげで、ほぼすべての部屋に設置されています。 私たちが発見したように、これらは非常に使いやすく、Arduino または Raspberry Pi プロジェクトに簡単に統合できます。 モーション センサーが役立つ状況と場所をいくつか紹介します。 - 家の玄関、バスルームとトイレ、部屋の入り口ドアの前の照明が自動的にオンになります。
- 屋内および屋外での警報。
- 自動ドア開閉。
- 防犯カメラの自動起動。
不完全な世界では、国民の財産と安心を守るために、さまざまな技術的なものが求められています。 したがって、モーションセンサーが装備された防犯警報装置を決して見ない人を見つけるのは難しいと思います。 動作の物理原理や実装は異なる場合がありますが、おそらく最も一般的なのは焦電型受動赤外線センサー (PIR) です。
おおよそ次のようになります。

それらは、赤外線範囲、つまりその中央部分、つまり5〜15ミクロンの放射線の変化に反応します(平均的な健康な人の体は約9ミクロンの範囲で放射します)。 エンドユーザーの観点から見ると、物事は非常に単純です。電源入力 (通常は 12 ボルト) とリレー出力 (通常はソリッドステートで常閉接点付き) です。 誰かが暖かく忍び寄って通り過ぎました - リレーは機能しました。 退屈。 しかし、内部では物事はそれほど単純ではありません。
今日は理論に少し時間を割いてから、そのようなデバイスを 1 つ分解して、動きの事実に反応するだけでなく、動きの方向を記録するセンサーを作ります。
練習に移りましょう
理論的な情報を準備して、はんだごてを入手します。 写真は分解したセンサーです(フレネルレンズ付きのフロントカバーと金属スクリーンを取り外した状態)。
焦電センサーに最も近いマイクロ回路のマーク(窓のある丸い金属 - これがそれです)を見て、(ああ、運がよかった!)それはLM324、つまりクワッドオペアンプであることがわかりました。 周囲の要素を調べることで、目的に最も適したオペアンプの出力が見つかります (私の場合、それはマイクロ回路のピン 1 であることが判明しました)。 見つかったかどうかを確認してみましょう。 通常、これにはオシロスコープが使用されます。 手元になかったのです。 しかし、それはArduinoであることが判明しました。 増幅後の信号レベルは数ボルト程度であり、特別な測定精度は必要ないため(定性的評価で十分です)、Arduino ADC 入力は非常に適しています。 見つかったオペアンプの出力と電源のマイナスに配線を半田付けし、ブレッドボードに出力します。 ワイヤーは長くてはなりません。 そうしないと、センサー信号ではなく、まったく異なる信号が測定される可能性があります。
ここで、正常な信号を取得するためにどれくらいの速さで信号を読み取る必要があるかを考えてみましょう。 有用な信号の周波数範囲は約 10 Hz に制限されていると上で述べました。 コテルニコフ (またはナイキスト - お好みの方) の定理を思い出して、20 Hz を超える周波数の信号を測定するのは意味がないと結論付けることができます。 それらの。 サンプリング周期は 50 ms で十分です。 ポート A1 を 50 ミリ秒ごとに読み取り、その値をシリアルにダンプする単純なスケッチを作成します (厳密に言えば、ポートへの書き込みにも時間がかかるため、信号測定が行われる頻度は 50 ミリ秒後よりも低くなりますが、これは重要ではありません)私たちの目的)。
署名されていない長い間。 void setup() ( Serial.begin(9600); pinMode(A1, INPUT); time=millis(); ) void loop() (if ((millis()-time) >= 50) ( Serial.println(analogRead) (A1)); ) 時間=ミリス(); )
電源を入れてセンサーの前で手を振ります(走り回ることもでき、さらに便利です)。 コンピューター側では、ポートからのデータをファイルにダンプします。
stty -F /dev/ttyUSB0 raw ispeed 9600 ospeed 9600 -ignpar cs8 -cstopb -echo cat /dev/ttyUSB0 > Output.txt
グラフを作成します (読み取り値の番号を示す列がファイルに追加されています)。
gnuplot> 1:2 の線を使用して "output.txt" をプロットします 
そして、実際に私たちが望んでいたもの、つまり双極性の電圧サージがわかりました。 やったー、理論はうまくいき、ワイヤーは正しい場所にはんだ付けされています。 グラフの簡単な分析 (つまり、表示) により、動きの存在という事実を多かれ少なかれ信頼性をもって固定することは、信号の平均値からの 150 単位の偏差と見なすことができると結論付けることができます。
いよいよ動き方向センサーを作ります。
スキーマを変更してみましょう。 アナログセンサー信号に加えて、一対の LED を Arduino (ポート 2 と 3、電流制限抵抗器を忘れないでください) に接続し、もう少し複雑なスケッチを作成します。
拡大
int a1; int 状態 2=0; 長い平均=0; intn=0; 署名されていない長い間。 void setup() ( pinMode(2, OUTPUT); pinMode(3, OUTPUT); pinMode(A1, INPUT);digitalWrite(2, LOW);digitalWrite(3, LOW); late(30000); //私のセンサーTurn-on // 作業を開始するまでに 30 秒かかります time=millis(); // 信号を 1,000 回測定して、 // その平均値を計算します // その間からの偏差をカウントするための何かがあるようにします (n<= 1000) {
++n;
a1=analogRead(A1);
average=average+a1;
delay(50);
}
average=average/1000;
//одновременным включением светодиодов
//сигнализируем, что система готова
digitalWrite(2, HIGH);
digitalWrite(3, HIGH);
delay(1000);
digitalWrite(2, LOW);
digitalWrite(3, LOW);
time=millis();
}
void loop() {
//опрашиваем датчик каждые 50 мс
if ((millis()-time) >= 50) ( //この単純な式を使用すると、アナログ信号は //値が -1/0/1 a1=(analogRead(A1)-average)/150 の離散信号に変わります; //信号の極性が変化した場合、 // 目的の LED スイッチ (a1) をオンにします (ケース 1: if (state2=-1) (digitalWrite(2, HIGH);digitalWrite(3, LOW);) state2=a1; Break; case -1: if (state2=1) (digitalWrite (2, LOW);digitalWrite(3, HIGH);) state2=a1; Break; ) // 初回繰り返し=millis(); ) )
センサーの放射パターンのビームのセット全体のうち 1 ペアだけを残すために、フレネル レンズの 1 つを除いてすべてをペーパー スクリーンで閉じます。

私たちは結果を楽しんでいます。
Arduino モーション センサーを使用すると、閉じた領域内で熱を発する物体 (人、動物) の動きを追跡できます。 このようなシステムは、たとえば玄関の照明をオンにするなど、家庭環境でよく使用されます。 この記事では、Arduino プロジェクトで PIR センサー (動きに反応するパッシブ赤外線センサーまたは焦電センサー) を接続することを検討します。 小型、低コスト、操作が簡単、接続に困難がないため、このようなセンサーをさまざまなタイプの警報システムで使用することができます。
PIR モーション センサーの設計はそれほど複雑ではありません。このセンサーは焦電素子 (中心に結晶を備えた円筒形の部分) で構成されており、カバー範囲内に一定レベルの赤外線が存在する場合に非常に敏感です。 物体の温度が高いほど、放射線の量も多くなります。 PIR センサーの上部には半球が取り付けられており、いくつかのセクション (レンズ) に分割されており、各セクションがモーション センサーの異なるセグメントに熱エネルギー放射を集中させます。 ほとんどの場合、レンズとしてフレネル レンズが使用されます。これにより、熱放射が集中するため、Arduino 赤外線モーション センサーの感度範囲を拡大できます。 
PIR センサーは構造的に 2 つの半分に分かれています。 これは、警報装置にとって重要なのは放射線のレベルそのものではなく、感知ゾーン内の動きの存在であるという事実によるものです。 したがって、部品は、もう 1 レベルの放射線が捕捉されたときに、高い値または低い値の信号が出力されるように取り付けられています。
Arduino モーション センサーの主な技術的特徴は次のとおりです。
- 移動物体の検知ゾーンは 0 ~ 7 メートルです。
- トラッキング角度範囲 – 110°;
- 供給電圧 - 4.5-6 V;
- 動作電流 - 最大 0.05 mA;
- 温度体制 – -20°から+50°С。
- 遅延時間は0.3秒から18秒まで調整可能。
赤外線モーションセンサーが取り付けられるモジュールには、ヒューズ、抵抗器、コンデンサーを備えた追加の電気配線が含まれています。
Arduino のモーションセンサーの動作原理は次のとおりです。
- デバイスが空の部屋に設置されている場合、各要素が受ける放射線量は電圧と同様に一定です。
- 人が部屋に現れると、まず最初の要素の表示領域に入り、そこに正の電気インパルスが現れます。
- 人が部屋の中を移動すると、熱放射も一緒に移動し、すでに 2 番目のセンサーに当てられます。 この PIR 要素はすでに負のパルスを生成しています。
- 多方向パルスがセンサーの電子回路によって記録され、Pir センサー Arduino の視野内に人がいると判断されます。
 外部ノイズ、温度変化、湿度から確実に保護するために、Arduino の Pir センサーの要素は密閉された金属ケースに取り付けられています。 ケース上部の中央には、赤外線を透過する素材 (ほとんどの場合シリコンをベースとする) で作られた長方形があります。 検出素子はプレートの裏側に取り付けられています。
外部ノイズ、温度変化、湿度から確実に保護するために、Arduino の Pir センサーの要素は密閉された金属ケースに取り付けられています。 ケース上部の中央には、赤外線を透過する素材 (ほとんどの場合シリコンをベースとする) で作られた長方形があります。 検出素子はプレートの裏側に取り付けられています。
モーションセンサーからArduinoへの配線図
 Pir センサーを Arduino に接続するのは難しくありません。 ほとんどの場合、モーション センサーを備えたモジュールには、背面に 3 つのコネクタが装備されています。 各デバイスのピン配置はメーカーによって異なりますが、ほとんどの場合、出力の近くに対応する刻印があります。 したがって、センサーを Arduino に接続する前に、表記法をよく理解しておく必要があります。 1 つの出力はグランド (GND) に接続され、2 つ目はセンサーから必要な信号 (+5V) を供給し、3 つ目はデータが取得されるデジタル出力です。
Pir センサーを Arduino に接続するのは難しくありません。 ほとんどの場合、モーション センサーを備えたモジュールには、背面に 3 つのコネクタが装備されています。 各デバイスのピン配置はメーカーによって異なりますが、ほとんどの場合、出力の近くに対応する刻印があります。 したがって、センサーを Arduino に接続する前に、表記法をよく理解しておく必要があります。 1 つの出力はグランド (GND) に接続され、2 つ目はセンサーから必要な信号 (+5V) を供給し、3 つ目はデータが取得されるデジタル出力です。
Pirセンサー接続:
- 「アース」 - Arduino GND コネクタのいずれかにあります。
- デジタル出力 - Arduino のデジタル入力または出力へ。
- Arduinoの電源 - + 5V。
Arduinoに赤外線センサーを接続する図を図に示します。
プログラム例
スケッチは、モーションセンサーの電源を入れた後の動作を確認するためのプログラムコードです。 最も単純な例には、多くの欠点があります。
- センサーの自己初期化に 1 分かかるため、誤検知の確率。
- リレー、サイレン、ライト表示などの実行タイプの出力デバイスの欠如。
- センサーの出力における信号の短い時間間隔。移動の場合にはソフトウェア レベルで遅延する必要があります。
これらの欠点は、センサーの機能を拡張することで解消されます。
Arduino モーション センサーを操作する例として使用できる、最も単純なタイプのスケッチは次のようになります。
#define PIN_PIR 2 #define PIN_LED 13 void setup() ( Serial.begin(9600); pinMode(PIN_PIR, INPUT); pinMode(PIN_LED, OUTPUT); ) void loop() ( int pirVal =digitalRead(PIN_PIR); シリアル。 println(digitalRead(PIN_PIR)); //動きが検出された場合 if (pirVal) (digitalWrite(PIN_LED, HIGH); Serial.println("動きが検出されました"); late(2000); ) else ( //Serial.print("モーションなし");digitalWrite(PIN_LED, LOW); ) )
センサーを使用するプロジェクトで可能なオプション
PIR センサーは、シグナリングの主な機能が特定の作業スペース内の人の有無を判断することであるプロジェクトでは不可欠です。 たとえば、次のような場所や状況です。
- 人が入ると玄関や玄関前の照明が自動的に点灯します。
- 浴室、トイレ、廊下の照明を点灯します。
- 屋内および近隣エリアに人が現れるとアラームが作動します。
- セキュリティシステムに搭載されることが多い監視カメラの自動接続。
Pir センサーは操作が簡単で、接続時に問題が発生せず、広い感度ゾーンを備えており、任意の Arduino ソフトウェア プロジェクトに統合することもできます。 ただし、対象範囲内に物体がいくつあるか、センサーにどれだけ近いかなどの情報を提供する技術的能力はなく、ペットにも機能する可能性があることに留意する必要があります。
PIR (パッシブ赤外線センサー) センサーを使用すると、動きをキャプチャできます。 警報システムによく使用されます。 これらのセンサーはサイズが小さく、安価で、エネルギー消費が少なく、操作が簡単で、実質的に摩耗しません。 このようなセンサーは、PIR に加えて、焦電センサーや赤外線モーション センサーと呼ばれます。
LED バックライトをベースにした工芸品で家庭用にセンサーを 1 組購入する必要がありました。
消費電流が比較的少なく、電源電圧も12Vなので、ケース入りの小型焦電型赤外線モーションセンサーを購入しました。
パッケージ: 
光感度を調整できるセンサーを 2 つ注文しました。 
センサーは 12 ~ 24 ボルトの電力をサポートします。 彼らはすでに、2.1 mmのセンターピンを備えた入力および出力用のソケットを備えた長さ約30 cmの標準ワイヤをはんだ付けしており、これは大きなプラスです。 何もはんだ付けする必要はなく、電源を接続するだけで使用できます。 

センサー自体は非常にコンパクトです。 外観: 


寸法: 



ボードや調整にアクセスするには、ケースを開ける必要があります。 背面カバーのラッチをドライバーでこじって外します。 


給料はこんな感じです。 
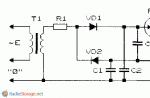
このデバイスの図を見つけました。評価は異なる場合がありますが、一般的に、作品の本質を理解するには正しいです。 
ここでは、超小型回路に電力を供給するために、入力に電圧レギュレータが接続されています。 
ちなみに、これがこの素子のデータシートです。マークが異なると安定化出力電圧が異なることがわかります。 ただし、重要な点は、最大 24 ボルトの入力電圧をサポートしているため、この電圧を超えないようにする必要があるということです。 
さらに、このスキームによれば、出力に電界効果トランジスタがあり、これが電力負荷回路の鍵となります。 
データシートには、通常の室温での最大連続電流が 15A と記載されていますが、トランジスタ冷却がないため、電力出力は制限されます。
デバイスの心臓部は Biss0001 チップで、このチップは外部放射線源を認識し、最小限の信号処理を実行してアナログ形式からデジタル形式に変換します。 

PIR モーション センサーは基本的に、赤外線のレベルを検出する焦電感知素子 (中心に長方形の結晶を備えた円筒形の部品) で構成されています。 センサーは実際には 2 つの部分に分かれています。 これは、私たちにとって重要なのは放射線のレベルではなく、その感受性ゾーン内での動きの存在が直接であるという事実によるものです。 センサーの 2 つの部分は、一方の半分が他方の半分よりも多くの放射線を拾う場合、出力信号が高い値または低い値を生成するように設定されています。 
ここからは直接調整に入ります。 私はデバイスをセットアップし、それに応じて何をどこに向けるかを投げました。 

時間は 1 秒から 500 秒まで調整できます。 スライダーを完全に緩めると、ライトが点滅するだけです。
センサーをオンにするためのしきい値については、この電圧が 11.5 ボルトからであることが実験的にわかりました。それより低い場合、センサーは単純にオンになりません。 
図によれば、センサーからの出力電圧が入力電圧以下であることがわかります。 12vに設定してみました。 電源の不正確な表示という形でエラーが発生するため、センサー自体の消費量は当然低くなります。 
スタンバイ モードでは、センサーは 84 μA を消費し、出力電圧は 170 mV です。 
正直、基板を外した状態ではセンサーの設置が非常に不便なので、裏蓋に穴を開けて、以下のように改善しました。 
回路図を収集し、すべてをセットアップします。 
チェック済み:
センサーは2日間動作しています。2番目のセンサーをヘッドフォンスタンドのバックライトに置きました。220Vで動作した前のセンサーとは異なり、より大きくてリレーをクリックしたのに対し、このセンサーはより優れている点が気に入っています。コンパクトで、もちろん静音。
最大範囲は測定しませんでしたが、アパート内で 3 メートル離れた場所では間違いなく機能します
私の購入に満足していますか? 完成度の高い完成度の高い端末です。
私たちが気に入った点:
+ 完全にカスタマイズ可能な動作モード
+ 最小限の自己消費
+ 高品質の仕上がりとコンパクトさ
+ 隙間のない明瞭な操作性
+. ソケット付きワイヤーの存在
気に入らなかった点:
- ケースを解析せずに設定に直接アクセスできない (固体)
- 取り付け耳は非常に小さいです(ただし、3Mなどの両面テープで取り付けた方が良いです)
白いセンサー キャップは黒いハウジングから突き出ていますが、非光センサー オプションでは黒色になります。
それで全部です。