Одна из причин, по которой конструкторы проявляют интерес именно к бесколлекторным электродвигателям — это необходимость в высокооборотных моторах с небольшими размерами. Причём у этих двигателей очень точное позиционирование. В конструкции имеется подвижный ротор и неподвижный статор. На роторе находится один постоянный магнит или несколько, расположенных в определённой последовательности. На статоре же находятся катушки, которые создают магнитное поле.
Нужно отметить еще одну особенность — бесколлекторные электродвигатели могут иметь якорь, расположенный как внутри, так и на внешней стороне. Следовательно, два типа конструкции могут иметь определенное применение в различных сферах. При расположении якоря внутри получается добиться очень высокой скорости вращения, поэтому такие моторы очень хорошо работают в конструкциях систем охлаждения. В том случае, если устанавливается привод с внешним расположением ротора, можно добиться очень точного позиционирования, а также высокой устойчивости к перегрузкам. Очень часто такие моторы используются в робототехнике, медицинском оборудовании, в станках с частотным программным управлением.
Как работают моторы
Для того чтобы привести в движение ротор бесколлекторного электродвигателя постоянного тока необходимо использовать специальный микроконтроллер. Его не получится запустить таким же образом, как синхронную или асинхронную машину. При помощи микроконтроллера получается включить обмотки двигателя так, чтобы направление векторов магнитных полей на статоре и якоре были ортогональны.

Другими словами, при помощи драйвера получается регулировать который действует на ротор бесколлекторного двигателя. Чтобы переместить якорь необходимо осуществить правильную коммутацию в обмотках статора. К сожалению, обеспечить плавное управление вращением не получается. Зато можно очень быстро увеличить ротора электродвигателя.
Отличия коллекторных и бесколлекторных двигателей
Основное отличие заключается в том, что на бесколлекторных электродвигателях для моделей отсутствует обмотка на роторе. В случае с коллекторными электромоторами, на их роторах имеются обмотки. А вот постоянные магниты устанавливаются на неподвижной части двигателя. Кроме того, на роторе устанавливается специальной конструкции коллектор, к которому производится подключение графитовых щёток. С их помощью подается напряжение на обмотку ротора. Принцип работы бесколлекторного электродвигателя тоже существенно отличается.
Как работает коллекторная машина
Чтобы произвести запуск коллекторного двигателя, потребуется подать напряжение на обмотку возбуждения, которая расположена непосредственно на якоре. При этом образуется постоянное магнитное поле, которое взаимодействует с магнитами на статоре, в результате чего проворачиваются якорь и коллектор, закрепленный на нём. При этом подается питание на следующую обмотку, происходит повтор цикла.

Скорость вращения ротора зависит напрямую от того, насколько интенсивно магнитное поле, а последняя характеристика зависит напрямую от величины напряжения. Следовательно, чтобы увеличить или уменьшить частоту вращения, необходимо изменить напряжение питания.
Для реализации реверса потребуется только лишь изменить полярность подключения мотора. Для такого управления не нужно использовать специальные микроконтроллеры, изменять частоту вращения можно при помощи обычного переменного резистора.
Особенности бесколлекторных машин
Но вот управление бесколлекторным электродвигателем невозможно без использования специальных контроллеров. Исходя из этого, можно сделать вывод, что в качестве генератора моторы такого типа применяться не могут. Для эффективности управления можно отслеживать положение ротора с помощью нескольких датчиков Холла. При помощи таких несложных устройств получается значительно улучшить характеристики, но стоимость электродвигателя увеличится в несколько раз.
Запуск бесколлекторных моторов

Изготавливать микроконтроллеры самостоятельно нет смысла, намного лучшим вариантом окажется покупка готового, пусть и китайского. Но необходимо придерживаться следующих рекомендаций при выборе:
- Учитывайте максимально допустимую силу тока. Этот параметр обязательно пригодится для различных видов работы привода. Характеристика часто указывается производителями непосредственно в названии модели. Очень редко указываются значения, характерные для пиковых режимов, в которых микроконтроллер не может работать продолжительное время.
- Для продолжительной работы необходимо учитывать и максимальную величину напряжения питания.
- Обязательно учитывайте сопротивление всех внутренних цепей микроконтроллера.
- Обязательно нужно учитывать максимальное число оборотов, которое характерно для работы этого микроконтроллера. Обратите внимание на то, что он не сможет увеличить максимальную частоту вращения, так как ограничение сделано на уровне программного обеспечения.
- Дешёвые модели микроконтроллерных устройств имеют импульсов в интервале 7...8 кГц. Дорогие экземпляры можно перепрограммировать, и этот параметр увеличивается в 2-4 раза.
Старайтесь подбирать микроконтроллеры по всем параметрам, так как они влияют на мощность, которую может развить электродвигатель.
Как осуществляется управление
Электронный блок управления позволяет провести коммутацию обмоток привода. Для определения момента переключения при помощи драйвера отслеживается положение ротора по датчику Холла, установленном на приводе.

В том случае, если нет таких устройств, необходимо считывать обратное напряжение. Оно генерируется в катушках статора, не подключенных на данный момент времени. Контроллер — это аппаратно-программный комплекс, он позволяет отслеживать все изменения и максимально точно задавать порядок коммутации.
Трехфазные бесколлекторные электродвигатели
Очень много бесколлекторных электродвигателей для авиамоделей выполняется под питание постоянным током. Но существуют и трехфазные экземпляры, в которых устанавливаются преобразователи. Они позволяют из постоянного напряжения сделать трехфазные импульсы.

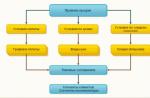
Работа происходит следующим образом:
- На катушку "А" поступают импульсы с положительным значением. На катушку "В" - с отрицательным значением. В результате этого якорь начнет двигаться. Датчики фиксируют смещение и подаётся сигнал на контроллер для осуществления следующей коммутации.
- Происходит отключение катушки "А", при этом импульс положительного значения поступает на обмотку "С". Коммутация обмотки "В" не претерпевает изменений.
- На катушку "С" попадается положительный импульс, а отрицательный поступает на "А".
- Затем вступает в работу пара "А" и "В". На них и подаются положительные отрицательные значения импульсов соответственно.
- Затем положительный импульс опять поступает на катушку "В", а отрицательный на "С".
- На последнем этапе происходит включение катушки "А", на которую поступает положительный импульс, и отрицательный идет к С.
И после этого происходит повтор всего цикла.
Преимущества использования

Изготовить своими руками бесколлекторный электродвигатель сложно, а реализовать микроконтроллерное управление практически невозможно. Поэтому лучше всего использовать готовые промышленные образцы. Но обязательно учитывайте достоинства, которые получает привод при использовании бесколлекторных электродвигателей:
- Существенно больший ресурс, нежели у коллекторных машин.
- Высокий уровень КПД.
- Мощность выше, нежели у коллекторных моторов.
- Скорость вращения набирается намного быстрее.
- Во время работы не образуются искры, поэтому их можно использовать в условиях с высокой пожарной опасностью.
- Очень простая эксплуатация привода.
- При работе не нужно использовать дополнительные компоненты для охлаждения.
Среди недостатков можно выделить очень высокую стоимость, если учитывать еще и цену контроллера. Даже кратковременно включить для проверки работоспособности такой электродвигатель не получится. Кроме того, ремонтировать такие моторы намного сложнее из-за их особенностей конструкции.
Задача электрического двигателя создать вращение, что приводит в движение радиоуправляемые модели.Часто одни и те же радиоуправляемые модели - автомодели, авиамодели, судомодели - сильно отличаются друг от друга по цене - почти в 2 раза. Эти модели могут быть укомплектованы коллекторными и бесколлекторными двигателями и соответственными регуляторами. Нужно понять, какой двигатель выбрать.
Существует 2 основных типа электродвигателей, использующихся в радиоуправляемых моделях: коллекторные и бесколлекторные.
(brushed, щеточные) дешеле, но модели с такими двигателями развивают меньшую скорость и такие моторы менее надежны.
Определяющей особенностей коллекторных двигателей является наличие щеточно-коллекторного узла, который обеспечивает движение радиоуправляемой модели. Главным внешним отличием коллекторного двигателя от бесколлекторного является наличие у него двух проводов вместо трех. Коллекторный двигатель состоит из подвижной части - ротор и неподвижной - статор (корпус). Коллектор - набор контактов, расположены на роторе и щётки - скользящие контакты, расположены вне ротора и прижаты к коллектору. Ротор с обмотками вращается внутри статора. Щётки используются, чтобы передавать электрическую энергию на катушки вращающихся обмоток ротора. Обычные коллекторные электродвигатели, имеют всего два провода (положительный и отрицательный), которыми двигатель подключается к регулятору скорости.
Коллекторные двигатели, используемые в радиоуправляемых моделях, работают от постоянного тока. К примеру, подав на два
провода двигателя соответствующее напряжение от источника постоянного тока, например, обычной батарейки или
аккумулятора, приводим вал двигателя в движение. Схема регулятора для коллекторного двигателя простая, что так же
уменьшает стоимость такой комплектации. Ротор двигателя разгоняет магнитное поле, создаваемое на обмотках. Величина этого поля зависит от напряжения приложенного к обмоткам, чем большее магнитное поле будет создано, тем быстрее будет крутиться ротор. На двигателе обычно указывается число оборотов обмотки двигателя, чем меньше
число, тем выше скорость вращения вала двигателя.
Среди преимуществ коллекторных двигателей радиоуправляемых моделей можно выделить: малые размеры, вес, а также
относительно низкая стоимость. Поэтому такой тип двигателя наиболее часто применяется в бюджетных комплектациях моделей или в моделях начального уровня.
Если говорить о надежности коллекторного двигателя, то он сильно уступает бесколлекторному. При всей их простоте, у них один огромный недостаток - ограниченный ресурс. Наличие щеточно-коллекторного узла подразумевает механическую систему подвижных контактов, то есть механическая работа щеточек и коллектора может привести к искрению при перегреве и быстрый износ при неблагоприятных условиях эксплуатации (влага, грязь, пыль). В процессе работы коллекторных двигателей происходит постепенный износ графитовых щеток и металла коллектора, по которым щетки скользят и рано или поздно они выходят из строя. Перед началом эксплуатации модели, двигатель желательно обкатать при пониженной нагрузке для того, чтобы щетки правильно притерлись к коллектору. При агрессивной (может быть 2 заезда) или длительной эксплуатации модели замена коллекторного моторчика – это частое и обыденное явление.
Бесколлекторные двигатели
(brushless, бесщёточные) – дороже, но способны развить большую скорость, а также более износостойкие. Модель, оборудованная современной бесколлекторной системой, ездит и быстрее, и дольше.

Высокая эффективность (коэффициент полезного действия) и износостойкость достигается благодаря отсутствию щеточно-коллекторного узла. Бесколлекторные моторы являются более мощными, чем коллекторные моторы того же размера. Главным внешним отличием бесколлекторного мотора от коллекторного является наличие у него трёх проводов вместо двух. У бесколлекторного двигателя подвижной частью является как раз статор (корпус) с постоянными магнитами, а неподвижной частью - ротор с трехфазной обмоткой. Переключение обмоток происходит за счет относительно сложной электронной схемы - регулятора.
Бесколлекторный двигатель приводится во вращение трёхфазным переменным током, поэтому для их работы необходим специальный контроллер скорости (регулятор), преобразующий постоянный ток от аккумулятора в переменный. Как бесколлекторный двигатель, так и регулятор для бесколлекторного двигателя имеет более сложную конструкцию, в силу чего, стоимость возрастает.
Двигатели, используемые в моделях, имеют закрытый корпус, что делает их устойчивыми к влаге, пыли, грязи. Можно сказать, что бесколлекторные моторы практически не изнашиваются. Изнашиваться могут только подшипники. Единственная возможность разбить мотор - в столкновении. Еще можно сжечь контроллер - как и любой регулятор, но при наличии в контроллере защиты по току он тоже прослужит долго.
Значения характеристик двигателя для радиоуправляемых моделей
.Помимо деления на коллекторные и бесколлекторные, двигатели делятся по следующим значимым характеристикам: мощности, КV, напряжению, максимальному току.
По размерам
. Для коллекторного двигателя - эта характеристика называется класс, где цифрой, к примеру, 280, 300,400, 480, 500, 600, 650, 700, 720, 820, 900, обозначается длина корпуса двигателя. Существует набор классов.
Пример: класс двигателя определяется его длиной - если мы говорим о двигателе 400-го класса, то речь идет о моторе с длиной корпуса 400мм.
У Бесколлектоных двигателей важной характеристикой яляется его размер - длина и ширина.
Различия в размерах дает представление о мощности бесколлекторного электромотора. Чем больше размер - тем выше мощность.
Пример: Двигатель 4274 означает:
диаметр - 42 мм,
длина - 74 мм.
Например, двигатель с такими размерами один из самых мощных, он подойдет на автомодель масштаба 1:8.
Мощность
двигателя (power, watt) - определяет работу, которую двигатель может выполнить в единицу времени. Самая важная характеристика мотора. Зная мощность,
можно определить максимальную нагрузку которую может выдержать двигатель по формуле.
Мощность (Ватт) = Напряжение питания (Вольт) * Сила тока (Ампер).
Зная мощность можно подобрать аккумулятор и регулятор по максимальной силе тока, получаемой из формулы.
Обороты
, об/В (KV, RPM) - обороты на вольт.
Важный параметр указывает скорость вращения вала двигателя. Обороты в минуту определяются количеством вращений в минуту, проще говоря как быстро вращается мотор. Скорость вращения ротора, измеряется в KV. Так принято обозначать коэффициент отношения частоты вращения оборотов мотора (об/мин) к напряжению питания мотора (В). Грубо говоря kV показывает насколько быстро будут вращаться разные моторы при одинаковом напряжении.
Максимальные обороты = KV * Напряжение питания двигателя.
Например: мотор мощностью 980 KV, на который подаются 11.1V от батарейки будет вращаться при 980 x 11.1 = 10878 оборотах в минуту без нагрузки.
Показания тока могут представлять максимальный непрерывный ток и предельные значения тока, который может подаваться на двигатель. Выбирая аккумулятор и регулятор, выбирайте те, на которых указаны значения максимального непрерывного тока равного и больше, чем значения тока на моторе.
Для разных моделей, разных используемых шестеренок и пропеллеров требуемый kV мотора подбирается и вычисляется индивидуально. По этому параметру можно подобрать применение мотора, аккумулятор и пропеллер. Так моторы с KV больше 2000, как правило, применяют на вертолетах либо на скоростных моделях. Мотор с высоким KV можно использовать с батарей из меньшего количества банок и он более эффективен с пропеллером с меньшим шагом. Моторы этого класса чаще используют на
летающих крыльях. Моторы с меньшим KV позволяют ставить аккумуляторы с большим количеством банок, таким образом несколько набирая вес, но
увеличивая продолжительность полета - не за счет емкости, а за счет снижения максимальных токов при той же работе выполняемой мотором.
Чем выше KV моторов, тем компактнее должны быть винты. Винты небольшого размера обеспечивают более высокую скорость, но снижают эффективность. Конфигурацию с винтами большого размера и, соответственно, моторы с более низким значением KV проще заставить стабильно летать, она расходует меньше энергии, позволяет поднять большую массу.
KV - значимая характеристика для бесколлекторных моторов. У коллекторных моторов обычно на KV не смотрят. Если моделист принял решение заменить коллекторный мотор, то обычно меняет на точно такой же.
Напряжение
питания, В (cell count, volts)
Напряжение, к которому приспособлен двигатель. Определяет количество банок аккумулятора, которое можно использовать с
мотоустановкой. При превышении резко уменьшается время жизни мотора.
Например, имеются моторы с рабочим напряжением 4,8 вольта, 6 вольт, и 7,2 вольта. Эти цифры указывают, с каким количеством банок в батарее предназначен работать этот двигатель. Напряжение на одной банке NiMH (никель-металгидридном) аккумулятора составляет 1,2 вольта - мотор с рабочим напряжением 4,8 вольт предназначен для работы от 4-х баночного аккумулятора. Эти цифры ориентировочные, моторы способны работать и при повышенных напряжениях.
Напряжение и KV связаны.
Сила тока, которую способен без повреждения выдержать двигатель и регулятор. Максимальный ток тем больше,чем больше физические размеры бесколлекторного двигателя. , А (current load, continuous current)
Количество ампер длительно и без перегрузки пропускаемое мотором при номинальном напряжении. Позволяет посчитать, сколько времени прослужит аккумулятор с этим мотором.
Максимальная эффективность
, % (max efficiency)
КПД - то количество энергии, которое мотор переводит непосредственно в полезную работу. Чем выше - тем лучше.
По конструкции бесколлекторные моторы делятся на две группы: inrunner и outrunner. Эта характеристика говорит о конструктивной особенности мотора.
Двигатели Inrunner
имеют расположенные по внутренней поверхности корпуса обмотки, и вращающийся внутри магнитный ротор. Большенству радиоуправляемых моделей - машин и лодок требуются бесколлекторный мотор Inrunner.
Двигатели Outrunner
имеют неподвижные обмотки, внутри двигателя, вокруг которых вращается корпус с помещенными на его внутреннюю стенку постоянными магнитами, т. е. в аутраннерах вращается внешняя часть мотора. Аутранеры выбирают для авиамоделей, т. к. они в силу своей конструкции лучше охлаждаются и у них больше вариаций, как их можно прикрепить. Моторы Outrunner имеют меньшие значения в Киловольтах, что означает, что они движутся с меньшей скоростью, но с большим крутящим (вращающим) моментом. Обычно мощность Аутранеров не определяют по внешним габаритам. Аутраннеры благодаря своей конструкции позволяют использовать большее число магнитных полюсов.
Количество полюсов магнитов
, используемых в бесколлекторных двигателях, может быть разным.
По количеству полюсов можно судить о крутящем моменте и оборотах и двигателя. Моторы с двухполюсными роторами имеют наибольшую скорость вращения при наименьшем крутящем моменте. Моторы с большим количеством полюсов имеют меньшую скорость вращения, но зато больший крутящий момент.
Также бесколлекторные двигатели бывают сенсорные и бессенсорные.
Сенсорные
лучше, так как сенсор обеспечивает более плавную работу двигателя, быстрый и плавный старт, более
рациональное использование энергии.
В этой статье мы хотели бы рассказать о том, как мы с нуля создали электрический мотор: от появления идеи и первого прототипа до полноценного мотора, прошедшего все испытания. Если данная статья покажется вам интересной, мы отдельно, более подробно, расскажем о наиболее заинтересовавших вас этапах нашей работы.
На картинке слева направо: ротор, статор, частичная сборка мотора, мотор в сборе
Вступление
Электрические моторы появились более 150 лет назад, однако за это время их конструкция не претерпела особых изменений: вращающийся ротор, медные обмотки статора, подшипники. С годами происходило лишь снижение веса электромоторов, увеличение КПД, а также точности управления скоростью.Сегодня, благодаря развитию современной электроники и появлению мощных магнитов на основе редкоземельных металлов, удаётся создавать как никогда мощные и в то же время компактные и легкие “Бесколлекторные ” электромоторы. При этом, благодаря простоте своей конструкции они являются наиболее надежными среди когда-либо созданных электродвигателей. Про создание такого мотора и пойдет речь в данной статье.
Описание мотора
В “Бесколлекторных моторах” отсутствует знакомый всем по разборке электроинструмента элемент “Щетки”, роль которых заключается в передаче тока на обмотку вращающегося ротора. В бесколлекторных двигателях ток подается на обмотки не-двигающегося статора, который, создавая магнитное поле поочередно на отдельных своих полюсах, раскручивает ротор, на котором закреплены магниты.Первый такой мотор был напечатан нами 3D принтере как эксперимент. Вместо специальных пластин из электротехнической стали, для корпуса ротора и сердечника статора, на который наматывалась медная катушка, мы использовали обычный пластик. На роторе были закреплены неодимовые магниты прямоугольного сечения. Естественно такой мотор был не способен выдать максимальную мощность. Однако этого хватило, что бы мотор раскрутился до 20к rpm, после чего пластик не выдержал и ротор мотора разорвало, а магниты раскидало вокруг. Данный эксперимент сподвиг нас на создание полноценного мотора.
Несколько первых прототипов
Узнав мнение любителей радиоуправляемых моделей, в качестве задачи, мы выбрали мотор для гоночных машинок типоразмера “540”, как наиболее востребованного. Данный мотор имеет габариты 54мм в длину и 36мм в диаметре.
Ротор нового мотора мы сделали из единого неодимового магнита в форме цилиндра. Магнит эпоксидкой приклеили на вал выточенный из инструментальной стали на опытном производстве.

Статор мы вырезали лазером из набора пластин трансформаторной стали толщиной 0.5мм. Каждая пластина затем была тщательно покрыта лаком и затем из примерно 50 пластин склеивался готовый статор. Лаком пластины покрывались чтобы избежать замыкания между ними и исключить потери энергии на токах Фуко, которые могли бы возникнуть в статоре.

Корпус мотора был выполнен из двух алюминиевых частей в форме контейнера. Статор плотно входит в алюминиевый корпус и хорошо прилегает к стенкам. Такая конструкция обеспечивает хорошее охлаждение мотора.

Измерение характеристик
Для достижения максимальных характеристик своих разработок, необходимо проводить адекватную оценку и точное измерение характеристик. Для этого нами был спроектирован и собран специальный диностенд.
Основным элементом стенда является тяжёлый груз в виде шайбы. Во время измерений, мотор раскручивает данный груз и по угловой скорости и ускорению рассчитываются выходная мощность и момент мотора.
Для измерения скорости вращения груза используется пара магнитов на валу и магнитный цифровой датчик A3144 на основе эффекта холла. Конечно, можно было бы измерять обороты по импульсам непосредственно с обмоток мотора, поскольку данный мотор является синхронным. Однако вариант с датчиком является более надёжным и он будет работать даже на очень малых оборотах, на которых импульсы будут нечитаемы.
Кроме оборотов наш стенд способен измерять ещё несколько важных параметров:
- ток питания (до 30А) с помощью датчика тока на основе эффекта холла ACS712;
- напряжение питания. Измеряется непосредственно через АЦП микроконтроллера, через делитель напряжения;
- температуру внутри/снаружи мотора. Температура измеряется посредством полупроводникового термосопротивления;

В результате наш стенд способен измерять в произвольный момент времени следующие характеристики мотора:
- потребляемый ток;
- потребляемое напряжение;
- потребляемая мощность;
- выходная мощность;
- обороты вала;
- момент на валу;
- мощность уходящая в тепло;
- температура внутри мотора.
Двигатели в мультироторных аппаратах бывают двух типов: коллекторные и бесколлекторные. Их главное отличие в том, что у коллекторного двигателя обмотки находятся на роторе (вращающейся части), а у бесколлекторного — на статоре. Не вдаваясь в подробности скажем, что бесколлекторный двигатель предпочтительнее коллекторного поскольку наиболее удовлетворяет требованиям, ставящимся перед ним. Поэтому в этой статье речь пойдёт именно о таком типе моторов. Подробно о разнице между бесколлекторными и коллекторными двигателями можно прочесть в .
Несмотря на то, что применяться БК-моторы начали сравнительно недавно, сама идея их устройства появилась достаточно давно. Однако появление транзисторных ключей и мощных неодимовых магнитов сделало возможным их коммерческое использование.

Устройство БК — моторов
Конструкция бесколлекторного двигателя состоит из ротора на котором закреплены магниты и статора на котором располагаются обмотки. Как раз по взаиморасположению этих компонентов БК-двигатели делятся на inrunner и outrunner.


В мультироторных системах чаще применяется схема Outrunner, поскольку она позволяет получать наибольший вращательный момент.
Плюсы и минусы БК — двигателей
Плюсы:
- Упрощённая конструкция мотора за счёт исключения из неё коллектора.
- Более высокий КПД.
- Хорошее охлаждение
- БК-двигатели могут работать в воде! Однако не стоит забывать, что из-за воды на механических частях двигателя может образоваться ржавчина и он сломается через какое-то время. Для избежания подобных ситуаций рекомендуется обрабатывать двигатели при помощи водоотталкивающей смазки.
- Наименьшие радиопомехи
Минусы:
Из минусов можно отметить только невозможность применения данных двигателей без ESC (регуляторы скорости вращения). Это несколько усложняет конструкцию и делает БК-двигатели дороже коллекторных. Однако если сложность конструкции является приоритетным параметром, то существуют БК-двигатели с встроенными регуляторами скорости.

Как выбрать двигатели для коптера?
При выборе бесколлекторных двигателей в первую очередь следует обратить внимание на следующие характеристики:
- Максимальный ток — эта характеристика показывает какой максимальный ток может выдержать обмотка двигателя за небольшой промежуток времени. Если превысить это время, то неизбежен выход двигателя из строя. Так же этот параметр влияет на выбор ESC.
- Максимальное напряжение — так же как и максимальный ток, показывает какое напряжение можно подать на обмотку в течение короткого промежутка времени.
- KV - количество оборотов двигателя на один вольт. Поскольку этот показатель напрямую зависит от нагрузки на вал мотора, то его указывают для случая, когда нагрузки нет.
- Сопротивление — от сопротивления зависит КПД двигателя. Поэтому чем сопротивление меньше - тем лучше.
Бесколлекторные двигатели" ЛикБез и проектирование
Как только я начал заниматся авиамоделизмом, мне сразу стало интересно почему у двигателя три провода, почему он такой маленький и в то же время такой мощный и зачем ему нужен регулятор скорости... Прошло время, и я во всем разобрался. И дальше поставил перед собой задачу сделать своими руками бесколлекторный двигатель.
Принцип работы электрического двигателя:
В основу работы любой электрической машины положено явление электромагнитной индукции. Поэтому если в магнитное поле поместить рамку с током, то на неё подействует сила Ампера
, которая создаст вращательный момент. Рамка начнет поворачиваться и остановится в положении отсутствия момента, создаваемого силой Ампера.


Устройство электрического двигателя:
Любой электрический двигатель состоит из неподвижной части - Статора
и подвижной части - Ротора
. Для того чтобы началось вращение, нужно по очереди менять направление тока. Эту функцию и выполняет Коллектор
(щетки).


Бесколлекторный двигатель - это двигатель ПОСТОЯННОГО ТОКА без коллектора, в котором функции коллектора выполняет электроника. (Если у двигателя три провода, это не значит что он работает от трехфазного переменного тока! А работает он от "порций" коротких импульсов постоянного тока, и не хочу вас шокировать, но те же двигатели которые используются в кулерах, тоже бесколлекторные, хоть они и имеют всего два провода питания постоянного тока)

Устройство бесколлекторного двигателя:
Inrunner
(произносится как "инраннер"). Двигатель имеет расположенные по внутренней поверхности корпуса обмотки, и вращающийся внутри магнитный ротор.
Outrunner
(произносится как "аутраннер"). Двигатель имеет неподвижные обмотки (внутри) вокруг которых вращается корпус с помещенным на его внутреннюю стенку постоянными магнитами. 
Принцип работы:
Для того чтобы бесколлекторный двигатель начал вращаться, напряжение на обмотки двигателя надо подавать синхронно. Синхронизация может быть организованна с использованием внешних датчиков (оптические или датчики холла), так и на основе противоЭДС (бездатчиковый), которая возникает в двигателе при его вращении.
Бездатчиковое управление:
Существуют бесколлекторные двигатели без каких либо датчиков положения. В таких двигателях определение положения ротора выполняется путем измерения ЭДС на свободной фазе. Мы помним, что в каждый момент времени к одной из фаз (А) подключен «+» к другой (В) «-» питания, одна из фаз остается свободной. Вращаясь, двигатель наводит ЭДС (т.е. в следствии закона электромагнитной индукции в катушке образуется индукционный ток) в свободной обмотке. По мере вращения напряжение на свободной фазе (С) изменяется. Измеряя напряжение на свободной фазе, можно определить момент переключения к следующему положению ротора.
Что бы измерить это напряжение изпользуется метод "виртуальной точки". Суть заключается в том, что, зная сопротивление всех обмоток и начальное напряжение, можно виртуально "переложить провод" в место соединения всех обмоток:
Регулятор скорости бесколлекторного двигателя:
Бесколлекторный двигатель без электроники - просто железка, т.к. при отсутствии регулятора, мы не можем просто подключить напряжение на него, чтоб он просто начал нормальное вращение. Регулятор скорости - это довольно сложная система радиокомпонентов, т.к. она должна:
1) Определять начальное положение ротора для запуска электродвигателя
2) Управлять электродвигателем на низких скоростях
3) Разгонять электродвигатель до номинальной (заданной) скорости вращения
4) Поддерживать максимальный момент вращения
Принципиальная схема регулятора скорости (вентильная):

Бесколлекторные двигатели были придуманы на заре появления электричества, однако систему управления к ним никто не мог сделать. И только с развитием электроники: с появлением мощных полупроводниковых транзисторов и микроконтроллеров, бесколлекторные двигатели стали применятся в быту (первое промышленное использование в 60-х годах).
Достоинства и недостатки бесколлекторных двигателей:
Достоинства:
-Частота вращения изменяется в широком диапазоне
-Возможность использования во взрывоопасной и агрессивной среде
-Большая перегрузочная способность по моменту
-Высокие энергетические показатели (КПД более 90 %)
-Большой срок службы, высокая надёжность и повышенный ресурс работы за счёт отсутствия скользящих электрических контактов
Недостатки:
-Относительно сложная система управления двигателем
-Высокая стоимость двигателя, обусловленная использованием дорогостоящих материалов в конструкции ротора (магниты, подшипники, валы)
Разобравшись с теорией, перейдем к практике: спроектируем и сделаем двигатель для пилотажной модели МХ-2.
Список материалов и оборудования:
1) Проволока (взятая из старых трансформаторов)
2) Магниты (купленные в интернете)
3) Статор (барашек)
4) Вал
5) Подшипники
6) Дюралюминий
7) Термоусадка
8) Доспуп к неограниченному техническому хламу
9) Доступ к инструментам
10) Прямые руки:)
Ход работы:
1) С самого начала решаем:
Для чего делаем двигатель?
На что он должен быть рассчитан?
В чем мы ограничены?
В моем случае: я делаю двигатель для самолета, значит пускай он будет внешнего вращения; рассчитан он должен на то, что он должен выдать 1400 грамм тяги при трех-баночном аккумуляторе; ограничен я в весе и в размере. Однако с чего же начать? Ответ на этот вопрос прост: с самой трудной детали, т.е. с такой детали, которую легче просто найти, а все остальное подгонять под неё. Я так и поступил. После многих неудачных попыток сделать статор из листовой мягкой стали, мне стало понятно, что лучше найти её. Нашел я её в старой видеоголовке от видеорекоудора.
2) Обмотка трехфазного бесколлекторного двигателя выполняется изолированным медным проводом, от сечения которого зависит значение силы тока, а значит и мощность двигателя. Незабываем что, чем толще проволока, тем больше оборотов, но слабее крутящий момент. Подбор сечения:
1А - 0.05мм; 15А - 0.33мм; 40А - 0.7мм
3А - 0.11мм; 20А - 0.4мм; 50А - 0.8мм
10А - 0.25мм; 30А - 0.55мм; 60А - 0.95мм 
3) Начинаем наматывать на полюса проволоку. Чем больше витков (13) намотано на зуб, тем большее магнитное поле. Чем сильнее поле, тем больший крутящий момент и меньшее количество оборотов. Для получения высоких оборотов, необходимо мотать меньшее количество витков. Но вместе с этим падает и крутящий момент. Для компенсации момента, обычно на мотор подают более высокое напряжение. 
4) Дальше выбираем способ соединения обмотки: звездой или треугольником. Соединение звездой дает больший крутящий момент, но меньшее количество оборотов, чем соединение треугольником в 1.73 раз. (впоследствии было выбрано соединение треугольник) 
5) Выбираем магниты. Количество полюсов на роторе должно быть четным (14). Форма применяемых магнитов обычно прямоугольная. Размер магнитов зависит от геометрии двигателя и характеристик мотора. Чем сильнее применяемые магниты, тем выше момент силы, развиваемый двигателем на валу. Также чем больше количество полюсов, тем больше момент, но меньше оборотов. Магниты на роторе закрепляются с помощью специального термоклея. 
Испытания данного двигателя я проводил на созданной мной витномоторной установке, которая позволяет измерить тягу, мощность и обороты двигателя.
Чтобы увидеть отличия соединений "звезда" и "треугольник" я соединял по разному обмотки:
В итоге получился двигатель соответствующий характеристикам самолета, масса которого 1400 грамм.