Зачастую приходится понижать скорость вращения двигателя, выполняющего определенные задачи в механизме. Уменьшение числа оборотов элеткродвигателя можно добиться с помощью , управляющих схем стандартного изготовления.
Электродвигатели переменного тока часто используются в деятельности человека, на металлообрабатывающих станках, транспорта, крановых механизмов и другого оборудования. Двигатели превращают энергию переменного тока питания во вращение вала и агрегатов. Используются в основном асинхронные двигатели переменного тока.
Ротор, а также и статор двигателя состоят из катушек провода, уложенного в сердечник, изготовленный из специальной стали. Классификация электродвигателей следует от способа закладки обмотки.
Обмотка из латунных и медных стержней вставляется в сердечник, по краям устанавливаются кольца. Такая катушка провода называется короткозамкнутым (КР) ротором. Электродвигатели небольшой мощности имеют стержни, а также диски, которые были отлиты вместе. Для электродвигателей с мощным моментом детали отливаются отдельно, затем свариваются. Обмотка статора может быть подключена двумя методами: треугольником, звездой.
Фазный ротор состоит из 3-фазной роторной обмотки, подключенной контактными кольцами и щетками к питанию. Обмотка соединена «звездой».

Расчет количества оборотов асинхронного двигателя
Распространенным двигателем на станках и подъемных устройствах является двигатель с короткозамкнутым ротором, поэтому пример для расчета следует брать для него. Сетевое напряжение поступает на статорную обмотку. Обмотки смещены друг от друга на 120 градусов. Возникшее поле электромагнитной индукции возбуждает электрический ток в обмотке. Ротор начинает работать под действием ЭМС.
Основной характеристикой работы двигателя является число оборотов в минуту. Рассчитываем это значение:
n = 60 f / p, обор / мин;
где f – частота сети, герц, р – количество полюсов статора (в парах).
На корпусе электродвигателя имеется табличка с техническими данными. Если ее нет, то можно самому рассчитать число оборотов вала оборудования по другим имеющимся данным. Расчет производится тремя способами.
- Расчет числа катушек, которое сравнивается с нормами для разного напряжения, следует по таблице:

- Расчет скорости работы по шагу диаметра обмотки по формуле:
2 p = Z 1 / y, где 2р – количество полюсов, Z 1 – число пазов в статоре, у – шаг обмотки.
Выбираем из таблицы подходящие обороты двигателя:

- Высчитываем количество полюсов по параметрам сердечника по формуле:
2p = 0,35 Z 1 b / h или 2 p = 0,5 D i / h,
где 2р – количество полюсов, Z 1 – число пазов, b – размер зуба, см, h – высота спинки, см, D i – диаметр по зубцам, см.
По результатам расчета и индукции следует число витков обмотки, сравнивается со значениями мотора по паспорту.
Как изменить скорость работы двигателя?
Изменять скорость вращающего момента механизма оборудования можно различными способами, например, механическими редукторами с переключением передач, муфтами и другими устройствами. Но это не всегда возможно. Практически используется 7 способов коррекции частоты вращения регулируемых приводов. Все способы разделены на два основных направления.
- Коррекция магнитного поля путем воздействия на частоту тока, уменьшение или увеличение числа пар полюсов, коррекция напряжения. Направление характерно моторам с короткозамкнутым (КР) ротором.
- Скольжение корректируется напряжением питания, добавлением еще одного резистора в цепь схемы ротора, установкой двойного питания, использованием каскада вентилей. Такое направление используется для роторов с фазами.
- Частотники бывают с двумя видами управления: скалярное, векторное. При скалярном управлении прибор действует при определенных значениях выходной разности потенциалов и частотой, работают в примитивных домашних приборах, например, вентиляторах. При векторном управлении сила тока устанавливается достаточно точно.
- При выборе прибора параметры мощности играют определяющую роль. Величина мощности расширяет сферу использования, упрощает обслуживание.
- При выборе устройства учитывается интервал рабочего напряжения сети, что снижает опасность выхода его из строя из-за резких перепадов разности потенциалов. При чрезмерном повышении напряжения конденсаторы сети могут взорваться.
- Частота – немаловажный фактор. Его величина определяется требованиями производства. Наименьшее значение говорит о возможности использования скорости в оптимальном режиме работы. Для получения большего интервала частоты применяют частотники с векторным управлением. В реальности часто используются инверторы с интервалом частот от 10 до 10 Гц.
- Частотный преобразователь, имеющий много разных выходов и входов удобен в пользовании, но стоимость его выше, настройка сложнее. Разъемы частотников бывают трех типов: аналоговые, дискретные, цифровые. Связь обратного вида вводных команд производится через аналоговые разъемы. Цифровые клеммы производят ввод сигналов от датчиков цифрового типа.
- Выбирая модель частотного преобразователя, нужно дать оценку управляющей шине. Ее характеристика подбирается под схему инвертора, что обуславливает число колодок. Наилучшим выбором работает частотник с запасом количества разъемов для дальнейшей модернизации прибора.
- Частотники, выдерживающие большие перегрузки (на 15% выше мощности мотора), при выборе имеют предпочтения. Чтобы не ошибиться при покупке преобразователя частоты, ознакомьтесь с инструкцией. В ней имеются главные параметры эксплуатации оборудования. Если нужен прибор для максимальных нагрузок, то необходимо выбирать частотник, сохраняющий ток на пике работы выше, чем на 10% от номинала.
Как подключить частотный преобразователь
Если кабель для подключения на 220 В с 1-й фазой, применяется схема «треугольника». Нельзя подключать частотник, если выходной ток выше 50% от номинального значения.
Если кабель питания на три фазы 380 В, то делается схема «звезды». Чтобы проще было подключать питание, предусмотрены контакты и клеммы с буквенными обозначениями.
- Контакты R, S, T предназначены для подключения сети питания по фазам.
- Клеммы U , V , W служат соединением электродвигателя. Для реверса достаточно изменить подключение двух проводов между собой.
В приборе должна быть колодка с клеммой подключения к земле. Подробней, как подключить, .
Как обслуживать частотные преобразователи?
Для долгосрочной эксплуатации инвертора требуется контроль за его состоянием и выполнение предписаний :
- Очищать от пыли внутренние элементы. Можно использовать компрессор для удаления пыли сжатым воздухом. Пылесос для этих целей не подходит.
- Периодически контролировать состояние узлов, производить замену. Срок службы электролитических конденсаторов составляет пять лет, предохранительных вставок – десять лет. Охлаждающие вентиляторы работают до замены 3 года. Шлейфы проводов используются шесть лет.
- Контроль напряжения шины постоянного тока и температура механизмов является необходимым мероприятием. При повышенной температуре термопроводящая паста засыхает и выводит из строя конденсаторы. Каждые 3 года на силовые клеммы наносят слой токопроводящей пасты.
- Условия и режим работы необходимо соблюдать в строгом соответствии. Температура окружающей среды не должна превышать 40 градусов. Пыль и влажность отрицательно влияют на состояние рабочих элементов прибора.
Окупаемость преобразователя частоты
Электроэнергия постоянно дорожает, руководители организаций вынуждены экономить разными путями. В условиях промышленного производства большая часть энергии расходуется механизмами, имеющими электродвигатели.
Изготовители устройств для электротехнических машин и агрегатов предлагают специальные устройства и приборы для управления электромоторами. Такие устройства экономят энергию электрического тока. Они называются инверторами или частотными преобразователями.
Финансовые затраты на покупку частотника не всегда оправдывают экономию средств, так как стоимость их сопоставима со стоимостью . Не всегда привод механизма можно быстро оснастить инвертором. Какие сложности при этом возникают? Разберем способы запуска асинхронных двигателей для пониманию достоинств инверторов.
Методы запуска двигателей
Можно определить 4 метода пуска двигателей.
- Прямое включение, для моторов до 10 кВт. Способ неэффективен для ускорения, увеличения момента, перегрузок. Токи выше номинала в 7 раз.
- Включение с возможностью выбора схем «треугольника» и «звезды».
- Интегрирование устройства плавного пуска.
- Применение инвертора. Способ особенно эффективен для защиты мотора, ускорения, момента, экономии энергии.
Экономическое обоснование эффекта от инвертора
Время окупаемости инвертора рассчитывается отношением затрат на покупку к экономии энергии. Экономия обычно равна от 20 до 40% от номинальной мощности мотора.
Затраты снижают факторы, повышающие производительность частотных преобразователей:
- Уменьшение затрат на обслуживание.
- Повышение ресурса двигателя.
Экономия рассчитывается:

где Э – экономия денег в рублях;
Р пч – мощность инвертора;
Ч – часов эксплуатации в день;
Д – число дней;
К – коэффициент ожидаемого процента экономии;
Т – тариф энергии в рублях.
Время окупаемости равно отношению затрат на покупку инвертора к экономии денег. Расчеты показывают, что период окупаемости получается от 3 месяцев до 3 лет. Это зависит от мощности мотора.
Так как линейная скорость равномерно меняет направление, то движение по окружности нельзя назвать равномерным , оно является равноускоренным .
Угловая скорость
Выберем на окружности точку 1 . Построим радиус. За единицу времени точка переместится в пункт 2 . При этом радиус описывает угол. Угловая скорость численно равна углу поворота радиуса за единицу времени.


Период и частота
Период вращения T - это время, за которое тело совершает один оборот.
Частота вращение - это количество оборотов за одну секунду.


Частота и период взаимосвязаны соотношением


Связь с угловой скоростью


Линейная скорость
Каждая точка на окружности движется с некоторой скоростью. Эту скорость называют линейной. Направление вектора линейной скорости всегда совпадает с касательной к окружности. Например, искры из-под точильного станка двигаются, повторяя направление мгновенной скорости.

Рассмотрим точку на окружности, которая совершает один оборот, время, которое затрачено - это есть период T . Путь , который преодолевает точка - это есть длина окружности.


Центростремительное ускорение
При движении по окружности вектор ускорения всегда перпендикулярен вектору скорости, направлен в центр окружности.



Используя предыдущие формулы, можно вывести следующие соотношения

Точки, лежащие на одной прямой исходящей из центра окружности (например, это могут быть точки, которые лежат на спице колеса), будут иметь одинаковые угловые скорости, период и частоту. То есть они будут вращаться одинаково, но с разными линейными скоростями. Чем дальше точка от центра, тем быстрей она будет двигаться.
Закон сложения скоростей справедлив и для вращательного движения. Если движение тела или системы отсчета не является равномерным, то закон применяется для мгновенных скоростей. Например, скорость человека, идущего по краю вращающейся карусели, равна векторной сумме линейной скорости вращения края карусели и скорости движения человека.
Земля участвует в двух основных вращательных движениях: суточном (вокруг своей оси) и орбитальном (вокруг Солнца). Период вращения Земли вокруг Солнца составляет 1 год или 365 суток. Вокруг своей оси Земля вращается с запада на восток, период этого вращения составляет 1 сутки или 24 часа. Широтой называется угол между плоскостью экватора и направлением из центра Земли на точку ее поверхности.
Согласно второму закону Ньютона причиной любого ускорения является сила. Если движущееся тело испытывает центростремительное ускорение, то природа сил, действием которых вызвано это ускорение, может быть различной. Например, если тело движется по окружности на привязанной к нему веревке, то действующей силой является сила упругости.

Если тело, лежащее на диске, вращается вместе с диском вокруг его оси, то такой силой является сила трения. Если сила прекратит свое действие, то далее тело будет двигаться по прямой
Рассмотрим перемещение точки на окружности из А в В. Линейная скорость равна v A и v B соответственно. Ускорение - изменение скорости за единицу времени. Найдем разницу векторов.
При покупке электродвигателя с рук рассчитывать на наличие технической документации к нему не приходится. Тогда встает вопрос о том, как узнать количество оборотов приобретаемого устройства. Можно довериться словам продавца, однако добросовестность не всегда является их отличительной чертой.
Тогда возникает проблема с определением числа оборотов. Решить ее можно, зная некоторые тонкости устройства мотора. Об этом и пойдет речь дальше.

Определяем обороты
Существует несколько способов измерения оборотов электродвигателя. Самый надежный заключается в использовании тахометра – устройства, предназначенного именно для этих целей. Однако такой прибор есть не у каждого человека, тем более, если он не занимается электрическими моторами профессионально. Поэтому существует несколько иных вариантов, позволяющих справиться с задачей «на глаз».

Первый подразумевает снятие одной из крышек двигателя с целью обнаружения катушки обмотки. Последних может быть несколько. Выбирается та, которая более доступна и расположена в зоне видимости. Главное, во время работы не допустить нарушения целостности устройства.

Когда катушка открылась взору, необходимо ее внимательно осмотреть и постараться сравнить размер с кольцом статора. Последний является неподвижным элементом электродвигателя, а ротор, находясь внутри него, осуществляет вращение.

Когда кольцо наполовину закрыто катушкой, число оборотов за минуту достигает 3000. Если закрывается третья часть кольца – число оборотов составляет примерно 1500. При четверти – число оборотов равно 1000.






Второй способ связан с обмотками внутри статора. Считается количество пазов, которые занимает одна секция какой-либо катушки. Пазы расположены на сердечнике, их число свидетельствует о количестве пар полюсов. 3000 оборотов в минуту будет при наличии двух пар полюсов, при четырех – 1500 оборотов, при шести – 1000.

Ответом на вопрос о том, от чего зависит количество оборотов электродвигателя, будет утверждение: от числа пар полюсов, причем это обратно пропорциональная зависимость.

На корпусе любого заводского двигателя имеется металлическая бирка, на которой указаны все характеристики. На практике такая бирка может отсутствовать или стереться, что немного усложняет задачу определения числа оборотов.

Корректируем обороты
Работа с разнообразным электрическим инструментом и оборудованием в быту или на производстве непременно ставит вопрос о том, как регулировать обороты электродвигателя. Например, становится необходимым изменить скорость передвижения деталей в станке или по конвейеру, скорректировать производительность насосов, уменьшить или увеличить расход воздуха в вентиляционных системах.

Осуществлять указанные процедуры за счет понижения напряжения практически бессмысленно, обороты будут резко падать, существенно снизится мощность устройства. Поэтому используются специальные устройства, позволяющие корректировать обороты двигателя. Рассмотрим их более подробно.

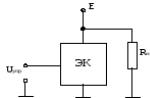
Частотные преобразователи выступают в качестве надежных устройств, способных кардинальным образом менять частоту тока и форму сигнала. Их основу составляют полупроводниковые триоды (транзисторы) высокой мощности и модулятор импульсов.

Микроконтроллер управляет всем процессом работы преобразователя. Благодаря такому подходу появляется возможность добиться плавного повышения оборотов двигателя, что крайне важно в механизмах с большой нагрузкой. Медленный разгон снижает нагрузки, положительно сказываясь на сроке службы производственного и бытового оборудования.






Все преобразователи оснащаются защитой, имеющей несколько степеней. Часть моделей работает за счет однофазного напряжения в 220 В. Возникает вопрос, можно ли сделать так, чтобы трехфазный мотор вращался благодаря одной фазе? Ответ окажется положительным при соблюдении одного условия.

При подаче однофазного напряжения на обмотку требуется осуществить «толчок» ротора, поскольку сам он не сдвинется с места. Для этого нужен пусковой конденсатор. После начала вращения двигателя оставшиеся обмотки будут давать недостающее напряжение.

Существенным минусом такой схемы считается сильный перекос фаз. Однако он легко компенсируется включением в схему автотрансформатора. В целом, это довольно сложная схема. Преимущество же частотного преобразователя заключается в возможности подключения моторов асинхронного типа без применения сложных схем.


Что дает преобразователь?
Необходимость использования регулятора оборотов электродвигателя в случае асинхронных моделей состоит в следующем:

Достигается значительная экономия электрической энергии. Поскольку не всякое оборудование требует высоких скоростей вращения моторного вала, ее имеет смысл снизить на четверть.

Обеспечивается надежная защита всех механизмов. Преобразователь частоты позволяет контролировать не только температуру, но и давление и прочие параметры системы. Этот факт особенно важен, если при помощи двигателя приводится в действие насос.

Датчик давления устанавливается в емкости, посылает сигнал при достижении должного уровня, благодаря чему мотор останавливается.






Совершается плавный пуск. Благодаря регулятору снимается необходимость использования дополнительных электронных устройств. Частотный преобразователь легко настроить и получить желаемый эффект.

Снижаются расходы на техническое обслуживание, поскольку регулятор сводит к минимуму риски поломки привода и других механизмов.


Таким образом электродвигатели с регулятором оборотов оказываются надежными устройствами с широкой сферой применения.

Важно помнить, что эксплуатация любого оборудования на основе электрического мотора только тогда окажется правильной и безопасной, когда параметр частоты вращения будет адекватен условиям использования.

Фото оборотов электродвигателя






Иногда применительно к автомобилям всплывают вопросы из математики и физики. В частности, одним из таких вопросов является угловая скорость. Она имеет отношение как к работе механизмов, так и к прохождению поворотов. Разберёмся же, как определить эту величину, в чём она измеряется и какими формулами тут нужно пользоваться.
Как определить угловую скорость: что это за величина?
С физико-математической точки зрения эту величину можно определить следующим образом: это данные, которые показывают, как быстро некая точка осуществляет оборот вокруг центра окружности, по которой она движется.
ПОСМОТРЕТЬ ВИДЕО
Эта, казалось бы, чисто теоретическая величина, имеет немалое практическое значение при эксплуатации автомобиля. Вот лишь несколько примеров:
- Необходимо правильно соотносить движения, с которыми вращаются колёса при повороте. Угловая скорость колеса автомобиля, движущегося по внутренней части траектории, должна быть меньше, чем у внешнего.
- Требуется рассчитывать, насколько быстро в автомобиле вращается коленвал.
- Наконец, сама машина, проходя поворот, тоже имеет определённую величину параметров движения – и от них на практике зависит устойчивость автомобиля на трассе и вероятность опрокидывания.
Формула времени, за которое вращается точка по окружности заданного радиуса
Для того, чтобы рассчитывать угловую скорость, используется следующая формула:
ω = ∆φ /∆t
- ω (читается «омега») – собственно вычисляемая величина.
- ∆φ (читается «дельта фи») – угол поворота, разница между угловым положением точки в первый и последний момент времени измерения.
- ∆t
(читается «дельта тэ») – время, за которое произошло это самое смещение. Точнее, поскольку «дельта», это означает разницу между значениями времени в момент, когда было начато измерение и когда закончено.
Приведённая выше формула угловой скорости применяется лишь в общих случаях. Там же, где речь идёт о равномерно вращающихся объектах или о связи между движением точки на поверхности детали, радиусом и временем поворота, требуется использовать другие соотношения и методы. В частности, тут уже будет необходима формула частоты вращения.
Угловая скорость измеряется в самых разных единицах. В теории часто используется рад/с (радиан в секунду) или градус в секунду. Однако эта величина мало что означает на практике и использоваться может разве что в конструкторской работе. На практике же её больше измеряют в оборотах за секунду (или минуту, если речь идёт о медленных процессах). В этом плане она близка к частоте вращения.
Угол поворота и период обращения
Гораздо более часто, чем угол поворота, используется частота вращения, которая показывает, сколько оборотов делает объект за заданный период времени. Дело в том, что радиан, используемый для расчётов – это угол в окружности, когда длина дуги равна радиусу. Соответственно в целой окружности находится 2 π радианов. Число же π – иррациональное, и его нельзя свести ни к десятичной, ни к простой дроби. Поэтому в том случае, если происходит равномерное вращение, проще считать его в частоте. Она измеряется в об/мин – оборотах в минуту.
Если же дело касается не длительного промежутка времени, а лишь того, за который происходит один оборот, то здесь используется понятие периода обращения. Она показывает, как быстро совершается одно круговое движение. Единицей измерения здесь будет выступать секунда.
Связь угловой скорости и частоты вращения либо периода обращения показывает следующая формулы:
ω = 2 π / T = 2 π *f,
- ω – угловая скорость в рад/с;
- T – период обращения;
- f – частота вращения.
Получить любую из этих трёх величин из другой можно с помощью правила пропорций, не забыв при этом перевести размерности в один формат (в минуты либо секунды)
Чему равна угловая скорость в конкретных случаях?
Приведём пример расчёта на основе приведённых выше формул. Допустим, имеется автомобиль. При движении на 100 км/ч его колесо, как показывает практика, делает в среднем 600 оборотов за минуту (f = 600 об/мин). Рассчитаем угловую скорость.
Для начала переведем об/мин в об/с. Для этого разделим 600 на 60 (число секунд в минуте) и получим 10 об/с. Попутно мы получили и период обращения: эта величина является обратной по отношению к частоте и при измерении в секундах 0,1 с.
Поскольку точно выразить π десятичными дробями невозможно, результат примерно равен будет 62,83 рад/с.
Связь угловой и линейной скоростей
На практике часто приходится проверять не только ту скорость, с какой изменяется угловое положение у вращающейся точки, но и скорость её самой применительно к линейному движению. В приведённом выше примере были сделаны расчёты для колеса – но колесо движется по дороге и либо вращается под действием скорости автомобиля, либо само ему эту скорость обеспечивает. Значит, каждая точка на поверхности колеса помимо угловой будет иметь и линейную скорость.
Рассчитать её проще всего через радиус. Поскольку скорость зависит от времени (которым будет период обращения) и пройденного расстояния (которым является длина окружности), то, учитывая приведённые выше формулы, угловая и линейная скорость будут соотноситься так:
- V – линейная скорость;
- R – радиус.
Из формулы очевидно, что чем больше радиус, тем выше и значение такой скорости. Применительно к колесу с самой большой скоростью будет двигаться точка на внешней поверхности протектора (R максимален), но вот точно в центре ступицы линейная скорость будет равна нулю.
Ускорение, момент и связь их с массой
Помимо приведённых выше величин, с вращением связано ещё несколько моментов. Учитывая же, сколько в автомобиле крутящихся деталей разного веса, их практическое значение нельзя не учесть.
Равномерное вращение – это важная вещь. Вот только нет ни одной детали, которая бы всё время крутилась равномерно. Число оборотов любого крутящегося узла, от коленвала до колеса, всегда в конечном итоге растёт, а затем падает. И та величина, которая показывает, насколько выросли обороты, называется угловым ускорением. Поскольку она производная от угловой скорости, измеряется она в радианах на секунду в квадрате (как линейное ускорение – в метрах на секунду в квадрате).
С движением и её изменением во времени связан и другой аспект – момент импульса. Если до этого момента мы могли рассматривать только чисто математические особенности движения, то здесь уже нужно учитывать то, что каждая деталь имеет массу, которая распределена вокруг оси. Он определяется соотношением начального положения точки с учётом направления движения – и импульса, то есть произведения массы на скорость. Зная момент импульса, возникающий при вращении, можно определить, какая нагрузка будет приходиться на каждую деталь при её взаимодействии с другой
Шарнир как пример передачи импульса
Характерным примером того, как применяются все перечисленные выше данные, является шарнир равных угловых скоростей (ШРУС) . Эта деталь используется прежде всего на переднеприводных автомобилях, где важно не только обеспечить разный темп вращения колёс при повороте – но и при этом их управляемость и передачу на них импульса от работы двигателя.
ПОСМОТРЕТЬ ВИДЕО
Конструкция этого узла как раз и предназначена для того, чтобы:
- уравнивать между собой, как быстро вращаются колёса;
- обеспечивать вращение в момент поворота;
- гарантировать независимость задней подвеске.
В результате все формулы, приведённые выше, учитываются в работе ШРУС.
Частота вращения вала (скорость) асинхронного двигателя (АД) напрямую связана с количеством полюсов обмотки. Количество полюсов указывается в серии не только отечественных электродвигателей, но довольно часто и в импортных двигателях. Например, АИР112М6 или W22 160M2P количество полюсов, соответственно шесть или два. Это характерно и для крановых двигателей МТН112-6 - шестиполюсной, МТН225М8 - восьмиполюсной.
Соотношение полюсов и оборотов вращения вала двигателя очень просто. Каждому числу полюсов соответствует определенная частота вращения вала АД. Если в обозначении асинхронного двигателя два полюса (2Р), то его номинальная частота вращения вала три тысячи оборотов в минуту (3000 об/мин). Если у двигателя четыре полюса (4Р), то номинальная скорость вращения выходного вала полторы тысячи оборотов в минуту (1500 об/мин). Если у асинхронного двигателя шесть полюсов (6Р), то частота вращения вала тысяча оборотов в минуту (1000 об/мин). Если у двигателя восемь полюсов (8Р), то скорость вращения вала семьсот пятьдесят оборотов в минуту (750 об/мин). У двенадцати полюсного двигателя (12Р) скорость на валу пятьсот оборотов в минуту (500 об/мин).
Кроме того, даже у многоскоростных асинхронных двигателей количество полюсов также есть в марке и оно также соотноситься с частотой вращения вала. Вообще электродвигатели могут иметь одну, две, три или четыре скорости вращения вала.
Двухскоростные двигатели могут иметь следующие соотношения количества полюсов и частот вращения вала:
- четыре и два полюса (4/2) соответствуют номинальной частоте вращения вала полторы и три тысячи оборотов в минуту (1500/3000);
- шесть и четыре полюса (6/4) соответствуют скорости вращения вала на тысячу и полторы тысячи оборотов в минуту (1000/1500);
- двенадцать и шесть полюсов (12/6) - скорости вращения вала на пятьсот и тысячи оборотам в минуту (500/1000);
- восемь и четыре полюса (8/4) - номинальной частоте семьсот пятьдесят на полторы тысячи оборотов в минуту (750/1500);
- восемь и шесть полюсов (8/6) - номинально дают семьсот пятьдесят и тысячу оборотов в минуту (750/1000).
Трехскоростные двигатели имеют следующие соотношения количества полюсов и частот вращения вала:
- шесть, четыре и два полюса (6/4/2) соответствуют тысячи, полутора и трем тысячам оборотов в минуту (1000/1500/3000);
- восемь, четыре и два полюса (8/4/2) дают семьсот пятьдесят, полторы тысячи и три тысячи оборотов в минуту (750/1500/3000);
- восемь, шесть и четыре полюса (8/6/4) соответствуют семистам пятидесяти, тысячи и полутора тысячам оборотов в минуту на выходном валу (750/1000/1500).
Четырехскоростные двигатели бывают двенадцать на восемь на шесть и четыре полюса (12/8/6/4) то есть частоты вращения вала при этом пятьсот, семьсот пятьдесят, тысяча и полторы тысячи оборотов в минуту (500/750/1000/1500).
Зная привязку частоты вращения вала к числу полюсов даже по марке совсем нетрудно определить частоту вращения выходного вала эл двигателя.
Причем, у импортных электродвигателей полюса обозначаются точно также, обозначение об/мин = rpm.
Смотрите также
.