Двигатели используются во многих областях техники. Для того чтобы происходило вращение ротора двигателя необходимо наличие вращающегося магнитного поля. В обычных двигателях постоянного тока это вращение осуществляется механическим способом с помощью щеток, скользящих по коллектору. При этом возникает искрение, а, кроме того, из-за трения и износа щеток для таких двигателей необходимо постоянное техническое обслуживание.
Благодаря развитию техники стало возможным генерировать вращающееся магнитное поле электронным способом, что было воплощено в бесколлекторных двигателях постоянного тока (БДПТ).
Устройство и принцип действия
Основными элементами БДПТ являются:
- ротор , на котором укреплены постоянные магниты;
- статор , на котором установлены обмотки;
- электронный контроллер .
По конструкции такой двигатель может быть двух типов:
с внутренним расположением ротора (inrunner)

с внешним расположением ротора (outrunner)
В первом случае ротор вращается внутри статора, а во втором – ротор крутится вокруг статора.
Двигатель типа inrunner используется в том случае, когда необходимо получить большие обороты вращения. Этот двигатель имеет более простую стандартную конструкцию, которая позволяет использовать неподвижный статор для крепления двигателя.
Двигатель типа outrunner подходит для получения большого момента при низких оборотах. В этом случае крепление двигателя производится с использованием неподвижной оси.
Двигатель типа inrunner — большие обороты, низкий крутящий момент. Двигатель типа outrunner — маленькие обороты, высокий крутящий момент.
Число полюсов в БДПТ может быть разным. По числу полюсов можно судить о некоторых характеристиках двигателя. Например, двигатель с ротором, имеющим 2 полюса, имеет большее число оборотов и малый момент. Двигатели с увеличенным количеством полюсов имеют больший момент, но меньшее число оборотов. Изменением числа полюсов ротора можно менять число оборотов двигателя. Таким образом, изменяя конструкцию двигателя, производитель может подобрать необходимые параметры двигателя по моменту и числу оборотов.
Управление БДПТ

Регулятор оборотов, внешний вид
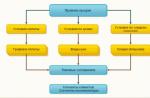
Для управления бесколлекторным двигателем используется специальный контролер — регулятор скорости вращения вала двигателя постоянного тока. Его задачей является генерация и подача в нужный момент на нужную обмотку необходимого напряжения. В контроллере для приборов с питанием от сети 220 В чаще всего используется инверторная схема, в которой происходит преобразование тока с частотой 50 Гц сначала в постоянный ток, а затем в сигналы с широтно-импульсной модуляцией (ШИМ). Для подачи питающего напряжения на обмотки статора используются мощные электронные ключи на биполярных транзисторах или других силовых элементах.
Регулировка мощности и числа оборотов двигателя осуществляется изменением скважности импульсов, а, следовательно, и действующим значением напряжения, подаваемого на обмотки статора двигателя.

Принципиальная схема регулятора оборотов. К1-К6 — ключи D1-D3 — датчики положения ротора (датчики Холла)
Важным вопросом является своевременное подключение электронных ключей к каждой обмотке. Для обеспечения этого контроллер должен определять положение ротора и его скорость . Для получения такой информации могут быть использованы оптические или магнитные датчики (например, датчики Холла ), а также обратные магнитные поля.
Более распространено использование датчиков Холла , которые реагируют на наличие магнитного поля . Датчики размещаются на статоре таким образом, чтобы на них действовало магнитное поле ротора. В некоторых случаях датчики устанавливают в устройствах, которые позволяют изменять положение датчиков и, соответственно, регулировать угол опережения (timing).
Регуляторы оборотов вращения ротора очень чувствительны к силе тока, проходящего через него. Если вы подберете аккумуляторную батарейку с большей выдаваемой силой тока, то регулятор сгорит! Правильно подбирайте сочетания характеристик!
Достоинства и недостатки
По сравнению с обычными двигателями БДПТ имеют следующие достоинства:
- большой кпд ;
- высокое быстродействие ;
- возможность изменения частоты вращения ;
- отсутствие искрящих щеток ;
- малые шумы , как в звуковом, так и высокочастотном диапазонах;
- надежность ;
- способность противостоять перегрузкам по моменту ;
- отличное соотношение габаритов и мощности .
Бесколлекторный двигатель отличается большим кпд. Он может достигать 93-95%.
Высокая надежность механической части БД объясняется тем, что в нем используются шарикоподшипники и отсутствуют щетки. Размагничивание постоянных магнитов происходит довольно медленно, особенно, если они выполнены с использованием редкоземельных элементов. При использовании в контроллере защиты по току срок службы этого узла довольно высок. Фактически срок службы БДПТ может определяться сроком службы шарикоподшипников .
Недостатками БДПТ является сложность системы управления и высокая стоимость.
Применение
Области применения БДТП следующие:
- создание моделей ;
- медицина ;
- автомобилестроение ;
- нефтегазовая промышленность ;
- бытовые приборы ;
- военная техника .
 Использование БД для авиамоделей
дает значительное преимущество по мощности и габаритам. Сравнение обычного коллекторного двигателя типа Speed-400 и БДТП того же класса Astro Flight 020 показывает, что двигатель первого типа имеет кпд 40-60%. Кпд второго двигателя в тех же условиях может достигать 95%. Таким образом, использование БД позволяет увеличить почти в 2 раза мощность силовой части модели или время ее полета.
Использование БД для авиамоделей
дает значительное преимущество по мощности и габаритам. Сравнение обычного коллекторного двигателя типа Speed-400 и БДТП того же класса Astro Flight 020 показывает, что двигатель первого типа имеет кпд 40-60%. Кпд второго двигателя в тех же условиях может достигать 95%. Таким образом, использование БД позволяет увеличить почти в 2 раза мощность силовой части модели или время ее полета.
Благодаря малому шуму и отсутствию нагревания при работе БДПТ широко используются в медицине, особенно в стоматологии.
В автомобилях такие двигатели используются в подъемниках стекол, электростеклоочистителях, омывателях фар и электрорегуляторах подъема кресел .
Отсутствие коллектора и искрения щеток позволяет использовать БД в качестве элементов запорных устройств в нефтегазовой промышленности .
В качестве примера использования БД в бытовой технике можно отметить стиральную машину с прямым приводом барабана компании LG. Эта компания использует БДТП типа Outrunner. На роторе двигателя имеется 12 магнитов, а на статоре – 36 катушек индуктивности, которые намотаны проводом диаметром в 1 мм на сердечники из магнитопроводящей стали. Катушки соединены последовательно по 12 штук в фазе. Сопротивление каждой фазы равно 12 Ом. В качестве датчика положения ротора используется датчик Холла. Ротор двигателя крепится к баку стиральной машины.
Повсеместно данный двигатель используется в жестких дисках для компьютеров, что делает их компактными, в CD и DVD приводах и системах охлаждения для микро-электронотехнических устройств и не только.
Наряду с БД малой и средней мощности в промышленности с тяжелыми условиями работы, судовой и военной промышленностях все больше используются большие БДПТ.
БД большой мощности разработаны для американских ВМС. Например, компания Powertec разработала БДТП мощностью 220 кВт со скоростью в 2000 об/мин. Момент двигателя достигает 1080 Нм.
Кроме указанных областей, БД применяются в проектах станков, прессов, линий для обработки пластмасс, а также в ветроэнергетике и использовании энергии приливных волн.
Характеристики
Основные характеристики двигателя:
- номинальная мощность ;
- максимальная мощность ;
- максимальный ток ;
- максимальное рабочее напряжение ;
- максимальные обороты (или коэффициент Kv);
- сопротивление обмоток ;
- угол опережения ;
- режим работы ;
- габаритно-массовые характеристики двигателя.
Основным показателем двигателя является его номинальная мощность, то есть мощность, вырабатываемая двигателем в течение длительного времени его работы.
 Максимальная мощность
– это мощность, которую может отдать двигатель в течение кратковременного отрезка времени, не разрушаясь. Например, для упомянутого выше бесколлекторного двигателя Astro Flight 020 она равна 250 Вт.
Максимальная мощность
– это мощность, которую может отдать двигатель в течение кратковременного отрезка времени, не разрушаясь. Например, для упомянутого выше бесколлекторного двигателя Astro Flight 020 она равна 250 Вт.
Максимальный ток . Для Astro Flight 020 он равен 25 А.
Максимальное рабочее напряжение – напряжение, которое могут выдержать обмотки двигателя. Для Astro Flight 020 задан диапазон рабочих напряжений от 6 до 12 В.
Максимальное число оборотов двигателя . Иногда в паспорте указывается коэффициент Kv – число оборотов двигателя на один вольт. Для Astro Flight 020 Kv= 2567 об/В. В этом случае максимальное число оборотов можно определить умножением этого коэффициента на максимальное рабочее напряжение.
Обычно сопротивление обмоток для двигателей составляет десятые или тысячные доли Ома. Для Astro Flight 020 R= 0,07 Ом. Это сопротивление влияет на кпд БДПТ.
Угол опережения представляет собой опережение переключения напряжений на обмотках. Оно связано с индуктивным характером сопротивления обмоток.
Режим работы может быть длительным или кратковременным. При долговременном режиме двигатель может работать длительное время. При этом выделяемое им тепло полностью рассеивается и он не перегревается. В таком режиме работают двигатели, например, в вентиляторах, конвейерах или эскалаторах. Кратковременный режим используется для таких устройств, как например, лифт, электробритва. В этих случаях двигатель работает короткое время, а затем долгое время остывает.
В паспорте на двигатель приводятся его размеры и масса. Кроме того, например, для двигателей, предназначенных для авиамоделей, приводятся посадочные размеры и диаметр вала. В частности, для двигателя Astro Flight 020 приведены следующие характеристики:
- длина равна 1,75”;
- диаметр равен 0,98”;
- диаметр вала равен 1/8”;
- вес равен 2,5 унции.
Выводы:
- В моделировании, в различных технических изделиях, в промышленности и в оборонной технике используются БДПТ, в которых вращающееся магнитное поле формируется электронной схемой.
- По своей конструкции БДПТ могут быть с внутренним (inrunner) и внешним (outrunner) расположением ротора.
- По сравнению с другими двигателями БДПТ имеют ряд преимуществ, основными из которых являются отсутствие щеток и искрения, большой кпд и высокая надежность.
Бесколлекторный двигатель постоянного тока имеет на статоре трёхфазную обмотку, и постоянный магнит на роторе. Вращающееся магнитное поле создаётся обмоткой статора, при взаимодействии с которым магнитный ротор приходит в движение. Для создания вращающегося магнитного поля на обмотку статора подаётся система трёхфазных напряжений, которая может иметь различную форму и формируется различными способами. Формирование питающих напряжений (коммутация обмоток) для бесколлекторного двигателя постоянного тока производиться специализированными блоками электроники – контроллером двигателя.
Заказать бесколлекторный двигатель в нашем каталоге
В простейшем случае обмотки попарно подключаются к источнику постоянного напряжения и по мере того как ротор поворачивается в направлении вектора магнитного поля обмотки статора производится подключение напряжения к другой паре обмоток. Вектор магнитного поля статора при этом занимает другое положение и вращение ротора продолжается. Для определения нужного момента подключения следующих обмоток используется датчик положения ротора, чаще других используются датчики Холла.
Возможные варианты и специальные случаи
Выпускаемые сейчас бесколлекторные двигатели могут иметь самую разную конструкцию.
По исполнению статорной обмотки можно выделить двигатели с классической обмоткой, намотанной на стальной сердечник, и двигатели с полой цилиндрической обмоткой без стального сердечника. Классическая обмотка обладает значительно большей индуктивностью, чем полая цилиндрическая обмотка, и соответственно большей постоянной времени. Из-за этого с одной стороны, полая цилиндрическая обмотка допускает более динамичное изменение тока (а, следовательно, и момента), с другой стороны при работе от контроллера двигателя, использующего ШИМ-модуляцию невысокой частоты для сглаживания пульсаций тока, требуются фильтрующие дроссели большего номинала (а соответственно и большего размера). Кроме того, классическая обмотка, как правило, имеет заметно больший момент магнитной фиксации, а также меньший КПД, чем полая цилиндрическая обмотка.

Ещё одно отличие, по которому разделяются различные модели двигателей – это взаимное расположение ротора и статора – существуют двигатели с внутренним ротором и двигатели с внешним ротором. Двигатели с внутренним ротором, как правило, имеют более высокие скорости и меньший момент инерции ротора, чем модели с внешним ротором. Благодаря этому двигатели с внутренним ротором имеют более высокую динамику. Двигатели с внешним ротором часто имеют несколько больший номинальный момент при том же наружном диаметре двигателя.
Отличия от других типов двигателей
Отличия от коллекторных ДПТ. Размещение обмотки на роторе позволило отказаться от щёток и коллектора и избавиться тем самым от подвижного электрического контакта, который значительно снижает надёжность ДПТ с постоянными магнитами. По этой же причине скорость у бесколлекторных двигателей, как правило, значительно выше, чем у ДПТ с постоянными магнитами. С одной стороны это позволяет увеличить удельную мощность бесколлекторного двигателя, с другой стороны не для всех применений такая высокая скорость является действительно необходимой
Отличия от синхронных двигателей с постоянными магнитами. Синхронные двигатели с постоянными магнитами на роторе очень похожи на бесколлекторные ДПТ по конструкции, однако есть и ряд различий. Во-первых термин синхронный двигатель объединяет в себе много различных видов двигателей, часть из которых предназначены для непосредственной работы от стандартной сети переменного тока, другая часть (например синхронные серводвигатели) может работать только от преобразователей частоты (контроллеров двигателей). Бесколлекторные двигатели, хотя и имеют на статоре трёхфазную обмотку, не допускают непосредственную работу от сетевого напряжения, и обязательно требуют наличия соответствующего контроллера. Кроме того синхронные двигатели предполагают питание напряжением синусоидальной формы в то время как бесколлекторные двигатели допускают питание переменным напряжением ступенчатой формы (блочная коммутация) и даже предполагают его использование в номинальных режимах работы.
Когда нужен бесколлекторный двигатель?
Ответ на этот вопрос достаточно прост – в тех случаях, когда он имеет преимущество перед остальными типами двигателей. Так, например, практически невозможно обойтись без бесколлекторного двигателя в применениях, где требуются большие скорости вращения: свыше 10000 об/мин. Оправдано применение бесколлекторных двигателей также и в тех случаях, когда требуется высокий срок службы двигателя. В тех случаях, когда требуется применять сборку из двигателя с редуктором, однозначно оправдано применение низкоскоростных бесколлекторных двигателей (с большим числом полюсов). Высокоскоростные бесколлекторные двигатели в этом случае будут иметь скорость выше, чем предельно допустимая скорость редуктора, и по этой причине не будет возможности использовать их мощность полностью. Для применений, где требуется максимально простое управление двигателем (без использования контроллера двигателя) естественным выбором будет коллекторный ДПТ.
С другой стороны, в условиях повышенной температуры или повышенной радиации проявляется слабое место бесколлекторных двигателей – датчики Холла. Стандартные модели датчиков Холла имеют ограниченную стойкость к радиации и диапазон рабочих температур. Если в подобном применении всё же имеется необходимость использовать бесколлекторный двигатель, то неизбежными становятся заказные исполнения с заменой датчиков Холла на более стойкие к указанным факторам, что увеличивает цену двигателя и сроки поставки.
Наверняка задавался вопросом, чем же отличается такой двигатель от других двигателей, например от тех, что стоят в сверлильных станках. Двигатели, установленные в не очень мощных станках, обычно не искрят, и работают они не так шумно, как та же дрель, обладающая меньшей чем станок мощностью.
В чем же дело? Дело в том, что двигатель с щетками — это коллекторный двигатель, а двигатель без щеток — бесколлекторный . Для решения разных задач подойдет свой тип двигателя — где-то лучше подойдет коллекторный, а где-то можно установить только бесколлекторный.
Коллекторный двигатель
Двигатель коллекторный имеет, как правило, всего два провода питания, он прост в управлении, достаточно регулировать постоянное или переменное напряжение питания и обороты станут соответственно меняться. Управлять коллекторным двигателем можно даже при помощи нехитрого диммера. Главное достоинство коллекторного двигателя — высокие обороты (десятки тысяч в минуту) при высоком крутящем моменте.
Принцип работы коллекторного двигателя очень прост. По сути, ротор его представляет собой набор медных рамок в магнитопроводе, которые поочередно коммутируются к источнику питания на коллекторно-щеточном узле. Статор может быть как из постоянных магнитов, так и с обмоткой, питаемой от того же источника, что и ротор, или от отдельного источника, а иногда статор и ротор включены в единую последовательную цепь (как например двигатели стиральных машинок-автоматов).
На каждую из секций обмотки ротора, через коллекторно-щеточный узел, поочередно, в процессе вращения ротора, подается электрический ток, в результате ротор перемагничивается, приобретая четко выраженные северный и южный магнитные полюсы, благодаря которым и происходит вращение ротора внутри статора (полюсы ротора выталкиваются полюсами статора, затем ротор дальше перемагничивается и вновь выталкивается). Поскольку ротор каждый раз коммутируется к источнику питания очередной секцией, вращение не останавливается, пока на коллектор подается питание.
Основной недостаток коллекторного двигателя

Обороты коллекторного двигателя очень удобно регулировать, но когда они достаточно высоки, щетки дают о себе знать. Поскольку щетки все время плотно прилегают к коллектору, на высоких оборотах они быстро изнашиваются, со временем так или иначе засоряются, и в конце концов начинают искрить.
Износ щеток, и вообще коллекторно-щеточного узла, ведет к снижению эффективности коллекторного двигателя. Таким образом, сам коллекторно-щеточный узел — это и есть главный недостаток коллекторных двигателей . Сегодня от коллекторных двигателей стараются отказываться в пользу бесщеточных шаговых.
У бесколлекторного двигателя нет ни коллектора, ни щеток. Простейший пример бесколлекторного двигателя — асинхронный трехфазный двигатель с ротором типа «беличья клетка». Еще один пример бесколлекторного двигателя — более современный - шаговый двигатель с магнитным ротором . Обмотки статора бесколлекторного двигателя сами перемагничиваются так, чтобы ротор все время разворачивался и непрерывно таким образом вращался.

Чаще всего современные бесколлекторные двигатели оснащаются датчиком положения ротора, по сигналам с которого работает регулятор скорости вращения двигателя. Сигнал с датчика положения ротора передается на процессор более 100 раз в секунду, в результате получается точное позиционирование ротора и высокий крутящий момент. Бывают, конечно, бесколлекторные двигатели и без датчика положения ротора, яркий пример — тот же асинхронный трехфазный мотор. Моторы без датчика положения стоят дешевле чем с датчиком.
Достоинства бесколлекторных двигателей

Поскольку ресурс подшипников ротора крайне велик, можно сказать, что в бесколлекторном двигателе практически отсутствуют изнашиваемые со временем детали, и он вообще не требует обслуживания в процессе эксплуатации. Здесь сведено к минимуму трение, отсутствует проблема перегрева коллектора, в целом надежность и эффективность бесколлекторных двигателей очень высоки.
Нет искрящих щеток, датчик положения ротора поможет сделать управление точным, - недостатков практически нет, одни достоинства. Разве что цена качественных шаговых двигателей выше чем у коллекторных (плюс драйвер), но это ничто по сравнению с регулярной заменой пружин, щеток и коллекторов у коллекторных двигателей.
Бесколлекторные двигатели на сегодняшний день являются довольно распространенными. Применяются данные устройства чаще всего с электроприводами. Также их можно встретить на различном холодильном оборудовании. В промышленной сфере они задействованы в системах нагрева.
Дополнительно бесколлекторные модификации устанавливаются в обычные вентиляторы для кондиционирования воздуха. В наше время на рынке представлено множество моделей с датчиками и без них. При этом по типу регуляторов модификации довольно сильно отличаются. Однако чтобы разобраться в данном вопросе более подробно, необходимо изучить устройство простого двигателя.
Устройство бесколлекторной модели
Если рассматривать обычный трехфазный бесколлекторный двигатель, то катушка индуктивности у него устанавливается медного типа. Статоры используются как широтные, так и импульсные. Зубцы у них применяются разного размера. Как говорилось ранее, существуют модели с датчиками, а также без них.
Для фиксации статора используются колодки. Непосредственно процесс индукции происходит за счет обмотки статора. Роторы чаше всего применяются двухполюсного типа. Сердечники у них устанавливаются стальные. Для закрепления магнитов на моделях имеются специальные пазы. Непосредственно управление бесколлекторным двигателем происходит при помощи регуляторов, которые располагаются у статора. Для подачи напряжения на внешнюю обмотку в устройствах устанавливаются изолирующие затворы.

Двухразрядные модели
Безколлекторные эл. двигатели данного типа часто используются в морозильном оборудовании. При этом компрессоры для них подходят самые разнообразные. В среднем мощность модели способна достигать 3 кВт. Схема бесколлекторного двигателя катушки чаще всего включает двойного типа с медной обмоткой. Статоры устанавливаются только импульсные. В зависимости от производителя длина зубцов может меняться. Датчики используются как электрического, так и индуктивного типа. Для систем нагрева указанные модификации походят плохо.
Также следует учитывать, что сердечники в бесколлекторных двигателях встречаются в основном стальные. При этом пазы для магнитов используются довольно широкие, а расположены они очень близко друг к другу. За счет этого частотность у устройств может быть высокой. Регуляторы для таких модификаций подбираются чаще всего одноканального типа.
Трехразрядные модификации
Трехразрядный бесколлекторный двигатель отлично подходит для систем вентилирования. Датчики у него используются, как правило, электрического типа. При этом катушки устанавливаются довольно широкие. За счет этого процесс индукции осуществляется быстро. В данном случае частотность устройства зависит от статора. Обмотка у него чаще всего встречается медного типа.
Предельное напряжение трехразрядные бесколлекторные двигатели способны выдерживать на уровне 20 В. Тиристорные модификации в наше время встречаются довольно редко. Также следует отметить, что магниты в таких конфигурациях могут устанавливаться как на внешней, так и на внутренней стороне роторной пластины.

Четырехразрядные модификации своими руками
Сделать четырехразрядный бесколлекторный двигатель своими руками можно абсолютно просто. Для этого необходимо в первую очередь заготовить пластину с пазами. Толщина металла в данном случае должна составлять примерно 2.3 мм. Пазы в этой ситуации обязаны находиться на расстоянии в 1.2 см. Если рассматривать простую модель, то катушку следует подбирать диаметром в 3.3 см. При этом пороговое напряжение она обязана выдерживать на уровне 20 В.
Колодки для устройства чаще всего подбираются стальные. В данном случае многое зависит от размеров роторной пластины. Непосредственно статор надо использовать с двойной обмоткой. При этом сердечник важно заготавливать стального типа. Если рассматривать модификации без регуляторов, то закончить сборку бесколлекторного двигателя можно установкой изолирующего затвора. При этом контакты устройства необходимо вывести на внешнюю сторону пластины. Для обычного вентилятора такие бесколлекторные модели подойдут идеально.
Устройства с регулятором АВР2
Бесколлекторный двигатель с регуляторами данного типа на сегодняшний день является весьма востребованным. Подходят указанные системы больше всего для приборов кондиционирования. Также они в промышленной сфере широко используются для холодильного оборудования. Они способны работать с электроприводами различной частотности. Катушки у них чаще всего устанавливаются двойного типа. При этом статоры можно встретить только импульсные. В свою очередь, широтные модификации являются не сильно распространенными.
Датчики в бесколлекторных двигателях с регуляторами данной серии используются только индуктивные. При этом частотность устройства можно отслеживать по системе индикации. Колодки, как правило, устанавливаются контактного типа, и крепиться они могут непосредственно на статорной пластине. Регулятор бесколлекторного двигателя в данном случае позволяет менять частотность довольно плавно. Происходит данный процесс за счет изменения параметра выходного напряжения. В целом эти модификации являются очень компактными.

Двигатели с регуляторами АВР5
Бесколлекторный двигатель с регулятором данной серии часто применяется в промышленной сфере для управления различными электроприборами. В бытовых устройствах он устанавливается довольно редко. Особенностью таких бесколлекторных модификаций можно назвать повышенную частотность. При этом параметр мощности у них менять просто. Катушки в данных модификациях встречаются самые разнообразные. Также следует отметить, что магниты чаще всего устанавливаются на внешней стороне роторной коробки.
Затворы в основном используются изолированного типа. Монтироваться они могут как у статорной коробки, так и сердечника. В целом регулировка устройства происходит довольно быстро. Однако следует учитывать также и недостатки таких систем. В первую очередь они связаны с перебоями питания при низких частотах. Также важно упомянуть, что у моделей данного типа потребление электроэнергии довольно большое. При этом для управления интегральными электроприводами устройства не подходят.
Использование регуляторов АВТ6
Данного типа регулятор скорости бесколлекторного двигателя на сегодняшний день пользуется большим спросом. Отличительной его особенностью можно смело назвать универсальность. Устанавливаются регуляторы, как правило, на бесколлекторные двигатели, мощность которых не превышает 2 кВт. При этом для управления системами вентилирования указанные устройства подходят идеально. Контроллеры в данном случае могут устанавливаться самые разнообразные.
Скорость передачи сигнала в данном случае зависит от типа системы управления. Если рассматривать тиристорные модификации, то они обладают довольно высокой проводимостью. При этом проблемы с магнитными помехами у них возникают редко. Самостоятельно собрать модель данного типа довольно сложно. В этой ситуации затворы чаще всего подбираются неизолированные.

Модели с датчиками Холла
Бесколлекторные двигатели с датчиками Холла широко используются в приборах нагрева. При этом подходят они для электроприводов различного класса. Непосредственно регуляторы используются только одноканальные. Катушки в устройстве устанавливаются медного типа. При этом величина зубцов модели зависит исключительно от производителя. Непосредственно колодки для устройств подбираются контактного типа. На сегодняшний день датчики чаще всего устанавливаются со стороны статора. Однако на рынке представлены также модели с нижним их расположением. В таком случае габариты бесколлекторного двигателя будут немного большими.

Низкочастотные модификации
Низкочастотный бесколлекторный двигатель на сегодняшний день активно используется в промышленной сфере. При этом для морозильных камер он подходит идеально. В среднем параметр полезного действия у него находится на уровне 70%. Затворы у моделей чаще всего используются с изоляторами. При этом тиристорные модификации в наше время встречаются довольно часто.
Системы управления используются серии АВР. При этом частотность модели зависит от типа сердечника и не только. Также следует учитывать, что существуют модели с двойными роторами. В данном случае магниты располагаются вдоль пластины. Статоры чаще всего используются с медной обмоткой. При этом низкочастотные бесколлекторные двигатели с датчиками встречаются очень редко.

Высокочастотные двигатели
Указанные модификации наиболее востребованными считаются для резонансных электроприводов. В промышленности такие модели встречаются довольно часто. Датчики у них устанавливаются как электронного, так индуктивного типа. При этом катушки чаще всего имеются на внешней стороне пластины. Роторы монтируют как в горизонтальном, так и вертикальном положении.
Непосредственно изменение частотности у таких устройств осуществляется через контроллеры. Устанавливаются они, как правило, со сложной контактной системой. Непосредственно стартеры используются только двойного типа. В свою очередь, системы управления зависят от мощности бесколлекторного устройства.
 Принцип работы бесколлекторного двигателя постоянного тока (БКДП) был известен очень давно, и бесщёточные моторы всегда были интересной альтернативой традиционным решениям. Несмотря на это, подобные электрические машины лишь в XXI веке нашли широкое применение в технике. Решающим фактором повсеместного внедрения стало многократное снижение стоимости электроники управления приводом БДКП.
Принцип работы бесколлекторного двигателя постоянного тока (БКДП) был известен очень давно, и бесщёточные моторы всегда были интересной альтернативой традиционным решениям. Несмотря на это, подобные электрические машины лишь в XXI веке нашли широкое применение в технике. Решающим фактором повсеместного внедрения стало многократное снижение стоимости электроники управления приводом БДКП.
Проблемы коллекторных двигателей
На фундаментальном уровне работа любого электродвигателя заключается в преобразовании электрической энергии в механическую. Существуют два основных физических явления, лежащих в основе устройства электрических машин:

Двигатель сконструирован таким образом, что магнитные поля, создаваемые на каждом из магнитов, всегда взаимодействуют между собой, придавая ротору вращение. Традиционный электродвигатель постоянного тока состоит из четырёх основных частей:
- статор (неподвижный элемент с кольцом из магнитов);
- якорь (вращающийся элемент с обмотками);
- угольные щётки;
- коллектор.
Такая конструкция предусматривает вращение якоря и коллектора на одном валу относительно неподвижных щёток. Ток проходит от источника через подпружиненные для хорошего контакта щётки на коммутатор, который распределяет электричество между обмотками якоря. Магнитное поле, индуцированное в последних, взаимодействует с магнитами статора, что заставляет статор вращаться.
Главный недостаток традиционного двигателя в том, что механический контакт на щётках невозможно обеспечить без трения. При увеличении скорости проблема проявляет себя сильнее. Коллекторный узел изнашивается со временем и, кроме того, склонен к искрению и способен ионизировать окружающий воздух. Таким образом, несмотря на простоту и дешевизну в изготовлении, подобные электродвигатели обладают некоторыми непреодолимыми недостатками:
- износ щёток;
- электрические помехи в результате искрения;
- ограничения в максимальной скорости;
- сложности с охлаждением вращающегося электромагнита.
Появление процессорной техники и силовых транзисторов позволило конструкторам отказаться от узла механической коммутации и изменить роль ротора и статора в электромоторе постоянного тока.
Принцип работы БДКП
 В бесколлекторном электродвигателе, в отличие от предшественника, роль механического коммутатора выполняет электронный преобразователь. Это позволяет осуществить «вывернутая наизнанку» схема БДКП - его обмотки расположены на статоре, что исключает необходимость в коллекторе.
В бесколлекторном электродвигателе, в отличие от предшественника, роль механического коммутатора выполняет электронный преобразователь. Это позволяет осуществить «вывернутая наизнанку» схема БДКП - его обмотки расположены на статоре, что исключает необходимость в коллекторе.
Иными словами, основное принципиальное различие между классическим двигателем и БДКП в том, что вместо стационарных магнитов и вращающихся катушек последний состоит из неподвижных обмоток и вращающихся магнитов. Несмотря на то что сама коммутация в нём происходит похожим образом, её физическая реализация в бесщёточных приводах гораздо более сложна.
Главный вопрос - точное управление бесколлекторным двигателем, предполагающее правильную последовательность и частоту переключения отдельных секций обмоток. Эта задача конструктивно разрешима лишь при возможности непрерывного определения текущего положения ротора.
Необходимые данные для обработки электроникой получают двумя способами :
- детектированием абсолютного положения вала;
- измерением напряжения, индуцируемого в обмотках статора.
 Для реализации контроля первым способом чаще всего используют либо оптические пары, либо закреплённые неподвижно на статоре датчики Холла, реагирующие на магнитный поток ротора. Главным достоинством подобных систем сбора информации о положении вала является их работоспособность даже при очень низких скоростях и в состоянии покоя.
Для реализации контроля первым способом чаще всего используют либо оптические пары, либо закреплённые неподвижно на статоре датчики Холла, реагирующие на магнитный поток ротора. Главным достоинством подобных систем сбора информации о положении вала является их работоспособность даже при очень низких скоростях и в состоянии покоя.
Бессенсорный контроль для оценки напряжения в катушках требуется хотя бы минимального вращения ротора. Поэтому в таких конструкциях предусмотрен режим запуска двигателя до оборотов, при которых напряжение на обмотках может быть оценено, а состояние покоя тестируется с помощью анализа влияния магнитного поля на тестовые импульсы тока, проходящие через катушки.
Несмотря на все перечисленные конструктивные сложности, бесщёточные двигатели завоёвывают всё большую популярность благодаря своей производительности и недоступному для коллекторных набору характеристик. Краткий перечень основных преимуществ БДКП перед классическими выглядит так:
- отсутствие механических потерь энергии на трении щёток;
- сравнительная бесшумность работы;
- лёгкость ускорения и замедление вращения благодаря малой инерции ротора;
- точность управления вращением;
- возможность организации охлаждения за счёт теплопроводности;
- способность к работе на высоких скоростях;
- долговечность и надёжность.
Современное применение и перспективы
Существует немало устройств, для которых увеличение времени безотказной работы имеет важнейшее значение. В подобном оборудовании применение БДКП всегда оправданно, несмотря на их сравнительно высокую стоимость. Это могут быть водяные и топливные насосы, турбины охлаждения кондиционеров и двигателей и т. д. Бесщёточные моторы используются во многих моделях электрических транспортных средств. В настоящее время на бесколлекторные двигатели всерьёз обратила внимание автомобильная промышленность.
БДКП идеально подходят для малых приводов, работающих в сложных условиях или с высокой точностью: питатели и ленточные конвейеры, промышленных роботы, системы позиционирования. Существуют сферы, в которых бесколлекторные двигатели доминируют безальтернативно: жёсткие диски, насосы, бесшумные вентиляторы, мелкая бытовая техника, CD/DVD приводы. Малый вес и высокая выходная мощность сделали БДКП также и основой для производства современных беспроводных ручных инструментов.
Можно сказать, что в области электроприводов сейчас наблюдается значительный прогресс. Продолжающееся падение цен на цифровую электронику породило тенденцию на повсеместное применение бесколлекторных двигателей взамен традиционных.