Изобретение относится к области электротехники и может быть использовано, например, в регулируемых электроприводах общепромышленных механизмов, а также в транспортных средствах, а именно в источниках питания бортовой сети автомобилей, тракторов, вездеходов и т.д. Сущность изобретения состоит в том, что синхронная реактивная двухполюсная машина содержит на статоре многофазную силовую обмотку, равномерно распределенную вдоль внутренней расточки статора и предназначенную для подключения к вентильному преобразователю, а также многофазную обмотку возбуждения с полным шагом, предназначенную для подключения к управляемым возбудителям. При этом согласно данному изобретению пакет сердечника статора выполняют в виде квадрата, при этом обмотка возбуждения размещена в дополнительных пазах, которые располагаются в углах пакета. Технический результат, достигаемый настоящим изобретением, заключается в повышении коэффициента использования электротехнической стали при изготовлении синхронной реактивной машины. 5 ил.
Рисунки к патенту РФ 2346376
Изобретение относится к электротехнике и может быть использовано, например, в регулируемых электроприводах общепромышленных механизмов, а также в транспортных средствах, а именно в источниках питания бортовой сети автомобилей, тракторов, вездеходов и.т.д.
Известны синхронные реактивные машины, которые имеют бесконтактное исполнение (см. Кононенко, Е.В. Синхронные реактивные машины / Е.В.Кононенко. - М.: Энергия, 1970. - 208 с.). Однако эти электрические машины имеют неудовлетворительные массогабаритные показатели, а попытки их улучшения требуют значительного усложнения конструкции ротора.
Находят также применение бесконтактные синхронные генераторы с возбуждением и вращающимся выпрямителем, с многофазной обмоткой якоря (статора) и силовым многофазным выпрямителем на выходе генератора (патент 4121148 США, МКИ Н02К 19/34; Н02Р 9/14; [Бесконтактный синхронный генератор] Brushless synchronous generator system; Hubert Platzer, Dipl.-Ing. Hitzinger & Co., Linz, Austria - №790263; Заявл. 25.04.1977; Опубл. 17.10.1978.). Однако размещение на роторе вращающейся обмотки возбуждения и диодов выпрямителя снижает механическую надежность генератора и не позволяет получить высокие угловые скорости вращения ротора.
Наиболее близким изобретением к заявляемой машине является синхронная реактивная машина, содержащая многофазную силовую обмотку и многофазную обмотку возбуждения с полным шагом, подключаемую к управляемым возбудителям (патент РФ №2240640 МПК Н02G 1/02. Синхронный реактивный генератор автономной энергетической установки и способ управления им. / Ю.С.Усынин, С.М.Бутаков, М.А.Григорьев, К.М.Виноградов. Заявлено 20.06.03, №2003118611/09. Опубликовано 20.11.04. Бюл. №32).
Особенностью электрической машины, описанной в этом прототипе, является то, что возбуждение электрической машины, работающей в режиме генератора, создается по продольной оси этого генератора не обмоткой возбуждения, расположенной на роторе, как в обычных синхронных генераторах (и которая отсутствует в прототипе), а током той фазы из дополнительных обмоток возбуждения, размещенных на статоре, витки которой в рассматриваемый момент времени расположены напротив межполюсного промежутка ротора и магнитная ось которой направлена, следовательно, вдоль продольной оси машины. При вращении ротора синхронного генератора витки обмотки возбуждения предыдущей фазы оказываются расположенными не в межполюсном промежутке, а напротив полюса ротора, поэтому ток в этой фазе уменьшают до нуля. Вместе с тем межполюсный промежуток надвигается на витки следующей фазы обмотки возбуждения, ток в которой устанавливают равным току возбуждения генератора. Когда ротор генератора делает один полный оборот (электрический), токи во всех фазах обмотки возбуждения генератора поочередно устанавливают равными току возбуждения генератора, пока витки этих фаз располагаются напротив межполюсного промежутка ротора.
В основу предлагаемого изобретения положена техническая задача, заключающаяся в повышении коэффициента использования электротехнической стали при изготовлении синхронной реактивной машины.
Решение поставленной задачи достигается тем, что в синхронной реактивной машине (СРМ), содержащей на статоре многофазную силовую обмотку, равномерно распределенную вдоль внутренней расточки статора и предназначенную для подключения к вентильному преобразователю, а также многофазную обмотку возбуждения с полным шагом, подключенную к управляемым возбудителям, согласно изобретению пакет сердечника статора выполнен в виде квадрата, при этом обмотка возбуждения размещена в дополнительных пазах, которые выполнены в углах пакета.
Предлагаемое техническое решение сохраняет все основные технические преимущества, характерные для прототипа (простоту конструкции, высокую технологичность изготовления электрической машины; бесконтактное исполнение в сочетании с отсутствием обмотки на роторе повышает надежность работы подшипников и всей машины; возможность выполнить ротор массивным (т.е. полюса ротора и вал из одной цельной заготовки) существенно повышает его прочность и поперечную жесткость, что позволяет получать высокие угловые скорости и большие перегрузки по моменту). Предлагаемое решение позволяет повысить коэффициент использования электротехнической стали при изготовлении электрической машины, т.к. та часть электротехнической стали, которая находится в углах пакета и которая при традиционной конструкции электромашины шла бы в обрезь, теперь полезно используется в магнитопроводе.
Проведенное исследование патентной и научно-технической литературы аналогичных устройств не выявило, поэтому можно утверждать, что предлагаемое устройство характеризуется новизной.
Предлагаемое техническое решение удовлетворяет критерию "изобретательский уровень", так как оно характеризуется новой совокупностью признаков, не известных из уровня техники.
Сущность изобретения поясняется чертежами, где изображены
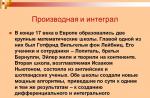
На фиг.1 - схематичный поперечный разрез синхронной реактивной машины;
На фиг.2 - пример функциональной схемы электрической генераторной установки;
На фиг.3 - графики токов и напряжений в отдельных участках схемы этой электрической генераторной установки. Здесь обозначены сплошными жирными линиями Е А, Е в, Е C - ЭДС вращения генератора; I х, I y - токи в обмотках возбуждения;
На фиг.4 - пример функциональной схемы электропривода с синхронной реактивной машиной;
На фиг.5 - графики токов и напряжений в отдельных участках схемы этого электропривода. Здесь обозначены сплошными жирными линиями U A , U B , U c - напряжения на выходах однофазных автономных инверторов, штриховыми линиями Е А, Е в, Е C - ЭДС вращения, наводимые в фазных силовых обмотках двигателя; I x , I Y - токи в обмотках возбуждения.
На фиг.1, где представлена в разрезе в качестве примера трехфазная синхронная реактивная машина, в пазах статора 1, расположенных в плоскостях А-а, В-b, С-с, сдвинутых пространственно на 120 градусов, размещены силовые обмотки 2, 3 и 4, образующие многофазную силовую обмотку. Ротор 5 синхронной реактивной машины выполнен явнополюсным. В примере синхронной реактивной машины, изображенном на фиг.1, длины полюсной дуги ротора и межполюсного промежутка равны и составляют 90 градусов. Кроме многофазной силовой обмотки на статоре в пазах, расположенных в плоскостях Х-х, Y-у, проходящих через углы его пакета, размещены обмотки возбуждения 6 и 7, выполненные с полным шагом и образующие многофазную обмотку возбуждения.
Возможны и другие версии обмоток в синхронной реактивной машине: с другим числом фаз обмотки возбуждения (например, две пары обмоток, оси которых параллельны сторонам пакета) и (или) силовых обмоток (например, соединенных по схеме "звезда - обратная звезда", шестифазная звезда и др.).
На фиг.2 представлен один из возможных примеров реализации функциональной схемы автономной электрической генераторной установки, выполненной с применением предлагаемой синхронной реактивной машины. Здесь обмотки 2, 3 и 4 соединяют в "звезду" и через неуправляемый выпрямитель 8, выполненный по трехфазной мостовой схеме, подключают параллельно с аккумуляторной батареей 9 к бортовой сети постоянного тока. Обмотки 6 и 7 подключают к выходам управляемых возбудителей 10 и 11, которые идентичны друг другу. Первый вход каждого из управляемых возбудителей подключают к источнику напряжения U зв, задающему требуемую величину тока возбуждения генератора. Второй вход каждого из тех же возбудителей подключают к выходу датчика 12 положения ротора синхронной реактивной машины. Датчик 12 механически связан с ротором 5 синхронной реактивной машины.
На фиг.3 изображены в функции угла поворота ротора синхронной реактивной машины эпюры токов I х и I у в обмотках возбуждения 6 и 7 и фазные ЭДС генератора Е A , Е B , Е C , наводимые в его силовых обмотках 2, 3 и 4.
За исходное состояние схемы принимается мгновенное состояние всех ее элементов, когда вращающийся по часовой стрелке ротор 5 занимает пространственное положение, как на фиг.1. На фиг.3 это положение обозначено 0 . В целях наглядности изложения начало отсчета угла поворота ротора на графиках (фиг.3) и исходное положение 0 (фиг.1) выбраны несовпадающими. В положении ротора 0 , принятом за исходное, проводники одной из обмоток возбуждения (а именно обмотки 6, расположенной в плоскости Х-х), находятся напротив межполюсного промежутка ротора 5. По этой обмотке, пока она расположена напротив этого промежутка, от своего управляемого возбудителя 10 пропускают ток в направлении, указанном на фиг.1, которое принято за положительное. Здесь и далее, как это принято в учебной литературе по электрическим машинам, токи и ЭДС обмоток считаются положительными, когда они в начале фаз (начала А, В, С силовых обмоток и начала X, Y обмоток возбуждения) направлены за плоскость чертежа (см., пример, Вольдек А.И. Электрические машины: Учебник для вузов. - Л.: Энергия, 1974. - 840 с.). Величина тока в обмотке возбуждения 6 соответствует напряжению задания U зв.
Благодаря току, протекающему по обмотке возбуждения 6, синхронная реактивная машина намагничена в продольном направлении, поэтому в проводниках обмоток, расположенных напротив полюсов ротора, наведены ЭДС вращения. При этом в проводниках, лежащих напротив верхнего полюса, знаки ЭДС положительны, а напротив нижнего - отрицательны.
В положении ротора 5, принятом на фиг.1 за исходное, наводятся ЭДС вращения: в обмотке 2 фазы А в положительном направлении, в обмотке 4 фасы С - в отрицательном направлении (фиг.3). В обмотке 3 фазы В в этом положении ротора ЭДС не наводится, т.к. ее витки располагаются напротив межполюсного промежутка, где индукция в воздушном зазоре равняется нулю. В обмотке возбуждения 7, проводники которой уложены в плоскости Y-у и которая в рассматриваемый момент времени располагается над полюсами ротора, ЭДС вращения наводится, но ток в ней отсутствует, что обеспечивается соответствующей работой возбудителей 10 и 11.
Направления токов во всех обмотках статора, соответствующие описанному исходному мгновенному положению ротора 5 синхронной реактивной машины, указаны на фиг.1.
Синхронная реактивная машина в режиме генератора работает следующим образом.
При вращении ротора синхронной реактивной машины ее полюса перемещаются поперек проводников обмоток статора. Когда края полюсов ротора 5 надвигаются на проводники обмотки 6, лежащие в плоскости Х-х (т.е. эта обмотка окажется над полюсом), то, используя сигнал датчика 12 положения ротора, с помощью управляемого возбудителя 10 ток в этой обмотке возбуждения уменьшают до нуля. На фиг.3 этот момент времени соответствует углу поворота ротора =90 градусов.
В это же самое время проводники следующей фазы обмотки возбуждения (а именно обмотки 7, проводники которой лежат в плоскости Y-у) окажутся напротив межполюсного промежутка. В этом положении ротора 5, используя сигнал датчика 12 положения ротора, с помощью управляемого возбудителя 11 в обмотке 7 устанавливают ток соответствующим по величине сигналу задания U зв, а по знаку положительным.
Осуществляя таким образом через каждые 90 электрических градусов переключения токов в фазных обмотках возбуждения, обеспечивают пространственное круговое движение магнитодвижущей силы возбуждения вдоль окружности воздушного зазора машины так, что эта магнитодвижущая сила перемещается синхронно с вращающимся ротором синхронной реактивной машины. Благодаря такому совместному вращательному движению ротора и магнитодвижущей силы возбуждения достигается непрерывное возбуждение электрической машины в продольном направлении.
Графики изменения токов в обмотках возбуждения и ЭДС вращения, наводимых в силовых обмотках, изображенных на фиг.3, подтверждают описанный принцип работы синхронной реактивной машины в режиме генератора. При вращении ротора по часовой стрелке (см. фиг.1), чтобы обеспечить постоянство знака магнитного потока, проходящего через ротор синхронной реактивной машины, принята следующая последовательность знаков импульсов токов в обмотках возбуждения: +I х, +I Y , -I x , -I Y . При этом каждый импульс имеет длительность 90 градусов, а все они в совокупности обеспечивают непрерывность возбуждения в течение полного оборота ротора. Пространственное положение ротора, изображенное на фиг.1, соответствует углу его поворота 0 на графике фиг.3, заключенному в диапазоне от 15 до 45 градусов.
Представленная на фиг.1 синхронная реактивная машина может работать и в режиме электродвигателя, если неуправляемый выпрямитель 8 заменить автономным инвертором. Соответствующая функциональная схема изображена на фиг.4. Здесь элементы схемы с 1 по 7 и с 10 по 12 выполняют те же функции, что и в схеме (см. фиг.2).
Для синхронной реактивной машины, работающей в режиме двигателя, могут быть сохранены без изменения схемы цепей возбуждения и графики токов возбуждения в обмотках 6 и 7, но кривые фазных напряжений, подаваемых на многофазную силовую обмотку, зависят от выбранной схемы силовых цепей автономного инвертора (АИ) 13. Так, в простейшем случае многофазный, в частности трехфазный, АИ 13 можно выполнить из трех однофазных АИ 14, 15, 16, а к выходным зажимам каждого из них подключить силовые обмотки 2, 3, 4 (см. фиг.4). Первые управляющие входы каждого из АИ 14, 15, 16 подключают к источнику напряжения U зт, задающему требуемую величину тока АИ. Вторые управляющие входы каждого из этих АИ подключают к выходным зажимам датчика 12 положения ротора.
Чтобы обеспечить вращение синхронной реактивной машины в режиме двигателя, на ее силовые обмотки 2, 3 и 4 с выходов АИ 14, 15 и 16 подают импульсы напряжения U A , U B , U C , когда проводники этих обмоток располагаются над полюсами ротора. Так, в положении ротора 0 , принятом за исходное (см. фиг.5), импульсы напряжения подаются в обмотку 2 фазы А в отрицательном направлении, в обмотку 4 фазы С - в положительном направлении. В обмотку 3 фазы В импульсы напряжения не подают, т.к. ее витки располагаются в зоне межполюсного промежутка.
Синхронная реактивная машина в режиме двигателя работает следующим образом.
При вращении ротора синхронной реактивной машины ее полюса перемещаются поперек проводников обмоток статора. Когда края полюсов ротора 5 уходят с проводников фазы А обмотки 2, лежащих в плоскости А-а (т.е. эти проводники окажутся напротив межполюсного промежутка), то, используя сигнал датчика 12 положения ротора, с помощью автономного инвертора 14 ток в этой обмотке устанавливают равным нулю. На фиг.5 этот момент времени соответствует углу поворота ротора =45 градусов.
В момент времени, соответствующий углу поворота ротора =75 градусов, проводники фазы В обмотки 3 окажутся над полюсами. В этом положении ротора 5, используя сигнал датчика 12 положения ротора, с помощью автономного инвертора 15 в обмотке 3 устанавливают ток соответствующим сигналу задания U зт.
Осуществляя таким образом через каждые 30 электрических градусов переключения токов в фазных силовых обмотках, обеспечивают непрерывное создание электромагнитного момента.
Графики изменения токов I х, I Y в обмотках возбуждения, импульсов напряжения U A , U B , U C , подаваемых на силовые обмотки 2, 3 и 4, а также ЭДС вращения Е A , Е B , Е C , наводимые в силовых обмотках 2, 3 и 4, изображенные на фиг.5, подтверждают описанный принцип работы синхронной реактивной машины в режиме двигателя.
Промышленная применимость предлагаемого решения.
Синхронная реактивная машина благодаря бесконтактности схемы, высокой механической прочности и жесткости ротора может быть рекомендована в первую очередь для транспортных установок, работающих в тяжелых и особо тяжелых условиях эксплуатации (например, вездеходы, промышленные тракторы). Она может быть рекомендована и для общепромышленных установок.
ФОРМУЛА ИЗОБРЕТЕНИЯ
Синхронная реактивная машина, содержащая на статоре многофазную силовую обмотку, равномерно распределенную вдоль внутренней расточки статора и предназначенную для подключения к вентильному преобразователю, а также многофазную обмотку возбуждения с полным шагом, предназначенную для подключения к управляемым возбудителям, отличающаяся тем, что пакет сердечника статора выполнен в виде квадрата, при этом обмотка возбуждения размещена в дополнительных пазах, которые выполнены в углах пакета.
Реактивная машина может работать как в режиме генератора, так и в режиме двигателя. Практическое применение, благодаря простоте своего устройства, находят реактивные двигатели малой мощности, от нескольких ватт до нескольких сот ватт.
Реактивная машина получает намагничивающий ток от другой (или других) синхронной машины, параллельно с которой она должна работать.
Принципиально активные и реактивные машины отличаются выполнением направляющего аппарата и рабочего колеса. В активном турбодетандере каналы направляющего аппарата в соответствии с их назначением выполняют как сопла Лаваля с длинной расширяющейся частью, а длина лопаток рабочего колеса невелика, что необходимо для уменьшения потерь от трения. В реактивных турбодетандерах, наоборот, направляющие лопатки выполняют так, чтобы каналы был сравнительно короткими и суживающимися, а рабочие лопатки, обра зующие каналы для расширения воздуха, - удлиненными, причем сами каналы хотя и расширяются в осевом направлении от периферии к центру (рис. 96 - 98), но площадь их сечения уменьшается, так как к центру каналы сужаются.
В реактивной машине температуры стенок направляющего аппарата и сопел незначительно отличаются от температуры газа; поэтому твердые частицы из струи газа могут высаживаться на стенках проточной части машины.
Магнитное поле реактивной машины создается только за счет магнитного потока реакции якоря, откуда и происходит название этой машины.
В других конструкциях однофазных реактивных машин используются кулачковые контакты, подключающие катушку к источнику, когда изменение магнитного сопротивления или индуктивности способствует созданию нужного момента, и разрывающие цепь ь других случаях. Двигатели этого типа используются в электробритвах. В настоящее время не существует точных аналитических методов определения мгновенного и среднего моментов таких машин. Кроме обычных дифференциальных уравнений, описание должно включать характеристики контактов и дугогасящего устройства. Хотя эта задача, возможно, и будет решена с помощью вычислительных машин, само устройство остается своим лучшим аналогом, поэтому программы для вычислительных машин будут создаваться на основе результатов экспериментальных исследований.
Кононенко Е - В - Синхронные реактивные машины.
В Военно-Воздушных Силах за рассматриваемый период устаревшие боевые поршневые самолеты полностью заменены современными реактивными машинами, включая сверхзвуковые дальние бомбардировщики. Заменено и пушечно-пулеметное авиационное оружие на ракетное.
Характерными для сопоставляемых зависимостей следует считать более высокие значения максимальных КПД ступеней для реактивных машин. Оптимальные значения Хая реактивных ступеней также превышают соответствующие значения Хая активных ступеней.
Это обусловлено тем, что период изменения потокосцепления фазы реактивного ДКР равен 2л, в т вермя как в синхронной реактивной машине обычного типа период изменения потокосцепления фазы по углу поворота ротора равен я.
Несколько ближе к реальности, хотя явно не пригодно ни для каких целей, кроме межпланетных путешествий, это решение проблемы продвижения при помощи электрической реактивной машины. Современная авиация и межпланетные корабли используют реакцию, возникающую при ускорении массы. В реактивных самолетах ускоряют смесь воздуха с продуктами сгорания топлива, в космических аппаратах, работающих в безвоздушном пространстве, - только горячие газы. Электрическая реактивная машина должна ускорять и отбрасывать от себя электроны о их ничтожной массой, и здесь можно ожидать реакции, не превышающей по мощности сильного рукопожатия.
Синхронная явнополюсная машина, работающая при отсутствии тока возбуждения, называется реактивной машиной. Обычно реактивные машины применяются в качестве двигателей небольшой мощности.
Самая известная из всех реактивных машин
Реактивные машины
Недавно мы уже писали про . Мы рассматривали их принцип действия и внутреннее устройство. Немного коснулись областей их применения. Сегодня мы хотим провести второй парад изобретений, посвятив его безумным видам реактивного транспорта. Куда только не присобачивали изобретатели эти двигатели. Итак парад объявляем открытым!
Реактивный самолет.
 Тут все понятно. Первым реактивным самолетом был Heinkel He 178, созданный в 1937 году.
Тут все понятно. Первым реактивным самолетом был Heinkel He 178, созданный в 1937 году.
С тех пор прошло много времени, все сильно изменилось и сейчас большинство самолетов реактивные, с различными модификациями этих двигателей. Самыми очевидными являются истребители, которые используют только реактивные двигатели. Это обусловленно тем, что винтовой истребитель будет очень быстро сбит, из-за своей тихоходности по сравнению с конкурентами.
Все авиалайнеры – турбореактивные, почти все винтовые пассажирские самолеты, на самом деле турбовинтовые. В общем в авиации турбодвигатели прижились и чувствуют себя хорошо, благо топливные баки большие. Но что происходит в других областях техники? Ходят же слухи и байки про туробореактивные машины, поезда, ранцы наконец? Они есть, читаем далее.
Реактивный поезд.

Bombardier JetTrain собственной персовной
Идея поставить на поезд реактивные двигатели, дабы придать ему должное ускорение витает в умах изобретателей с 60 года. Тогда, во время холодной войны и гонки вооружений были созданы прототипы поездов, на крышах которых были установлены спаренные реактивные двигатели, прямоточного типа. Мы рассказывали об этом в предыдущем “ “.
И казалось бы – это отголоски гонки вооружений, ан нет. И современные конструкторы бредят реактивными поездами. Вот например новейший прототип реактивного локомотива JetTrain Bombardier. По нашему мнению тема реактивных поездов до сих пор не раскрыта. Конечно на крышу турбины уже никто не ставит, но она присуствует в двигателе этого поезда.
Такие двигатели способны долгое время поддерживать стабильную работу, а также не могут работать вхолостую, потому что даже без нарузки, этот тип двигателей потребляет 65% от обычного потребления топлива под нагрузкой. Куда? На поддержание “цепной реакции” – подпитку собственной турбины, на минимальных оборотах. Именно поэтому такие двигатели не получили жизни в автомобилях, зато повсеместно используются в самолетах, где они не только двигают самолет, но еще и вырабатывают электроэнергию.
Если суметь преодолеть все технические недостатки, то турбины могут поселится в поездах дальнего следования, благо сил хватает мощность локомотива от Bombardier – 5000 л.с.
Реактивная машина.

Самый быстрый в мире автомобиль
Подвешивание 6000 сильной турбины к своему Ford Focus будоражит многие умы. Неясно практическое применение этой модификации, но смотрится крайне здорово. Вообще, если смотреть со стороны, введя в гугл запрос jet car, можно подумать что за рубежом этим занимается любой школьник. Неизвестно что привело к такому повальному турбированию машин, но последствия хорошо и ярко показаны в фильме “Премия Дарвина”
Если же обратить свой взор к соревнованиям, то здесь автомобиль с обычным двигателем уже никогда е сможет поставить рекорды. Реактивные авто уже много лет ставят рекорды скорости на земле. На момент написания статьи есть информация про последний рекорд скорости, установленный Энди Грином, на автомобиле Thrust II SSC, сконструированном Ричардом Ноблом. Энди проехал по дну знаменитого озера в Неваде с максимальной скоростью 1229,78 км/ч. Это выше скорости звука, и является абсолютным рекордомю Однако средняя скорость машины по двум заездам составила 1226,522 км/ч.
Такую подвижность машине весом в делять тонн, с корпусом из кевлара, придали два реактивных двигателя Rolls-Royse (Spey 205), суммарной мощностью 110 000 л.с. Управление этого чуда техники было самолетным.
Реактивный грузовик.
Встречается и такое.
Существует видео про реактивный грузовик. Где и когда это было и есть ли еще что-то подобное – неизвестно.
Реактивный велосипед.
Еще одно увлекательное занятие, будоражащее умы зарубежных изобретателей, это реактивный велосипед. В принципе, на это многострадальное средство передвижения можно навесить прямоточный реактивный двигатель.
Например
Смотрится крайне эффектно. Реактивные велосипеды продаются и видимо выпускаются серийно, вот фотография агрегата под названием Fire Trick BOB.

Стоит 1 миллион йен. Все серьезно: скоростная турбина, самолетное топливо, стоимость одной минуты работы (учитывая все расходные материалы – 500 йен), тяга 5,5 лошадиных сил. Заметьте – здесь используется полноценный реактивный двигатель, с турбиной, наддувом и прочими прелестями.
Вот еще одно фото, найденное на просторах интернета. Но здесь, в отличие от Fire Trick используется прямоточный двигатель, что намного проще в конструировании и обслуживании.
Реактивный ранец
 Этот вид реактивного транспорта слабо распространен из-за больших сложностей в изготовлении, применении и управлении данным аппаратом. Первоначально Jetpack планировалось применять в военных целях, например для перелета через границу (чтобы не касаться земляной полосы и ограды, не оставлять следов).
Этот вид реактивного транспорта слабо распространен из-за больших сложностей в изготовлении, применении и управлении данным аппаратом. Первоначально Jetpack планировалось применять в военных целях, например для перелета через границу (чтобы не касаться земляной полосы и ограды, не оставлять следов).
Разработки велись в США в 50-60-е годы. Главным инженером в этих исследованиях был Венделл Мур, который поначалу лично и на свои средства разрабатывал реактивные ранцы.
Впервые свободный полет на реактивном ранце был совершен 20 апреля 1961 года, в пустыне около городка Ниагара Фоллс.
Рекондная продолжительность полета составила 21 секунду, и 120 метров, на высоте 10 метров. При этом расходовалось 19 литров перекиси водорода, которая была дефицитом.
В общем после того, как ранец был сделан, товарищи военные поняли, что заигрались. Хотя было ясно изначально, что даже если взвод солдат (7 человек) перелетит тихой ночью через границу на Jetpacks, об этом будут знать ближайшие 8-10 квадратных километров, сила звука достигает 130 дб) Тащить далее за собой такое оборудование (50 кг) никто не будет, да и в остальных применениях ранцы практически бесполезны.
Реактивный мопед

Теоретически должен развивать до ста километров в час. На него привешены два реактивных двигателя JFS 100.
Практичность применения такая же как и у турбо велосипеда, но ведь прикольно!
Реактивная установка Катюша

Легендарная система реактивного залпового огня. Является одним из самых безбашенных проектов советской военной промышленности. Стреляет снарядами РС-132.
Каждый снаряд имеет твердотопливных реактивных двигатель на бездымном порохе, включает в себя боевую, топливную и собственно реактивную части.
Применение катюши сопровождалось неслыханным фейерверком и полным уничтожением всего что попадало под обстрел на расстоянии до 8,5 км от установки. Впервые БМ-13 были применены для уничтожения складов с горючим, чтобы они не достались подходящим фашистским войскам.
Применение же реактивной установки по прямому назначению первое время часто вызывало панику у противника.
Газотурбинные двигатели - это невероятная вещь, и их применение не ограничивается лишь самолетами. Мы подобрали для вас десять самых интересных наземных транспортных средств, питающихся от огромных турбин.
Jet Corvette. Кастомайзеры очень любят брать моторы от Corvette и устанавливать их на другие машины, чтобы сделать их быстрее. Винс Гранателли подошел к делу с другого конца. Он, наоборот, избавил свой Corvette от V8 в пользу... газотурбинного двигателя Pratt & Whitney ST6B. 880-сильная турбина делает машину самым быстрым Corvette, допущенным к эксплуатации по дорогам общего пользования. Разгон до 100 км/ч осуществляется всего за 3,2 секунды.
Thrust SSC. Невероятный (но еще не завершенный) Bloodhound SSC наверняка возьмет свой рекорд (запланированы 1 600 км/ч), однако оригинальный Thrust SSC по-прежнему является серьезным техническим достижением. Благодаря 110 000 л. с. от двух турбореактивных двигателей Rolls-Royce, Thrust в 1997 году установил сухопутный рекорд скорости на отметке 1 228 км/ч и стал первым автомобилем, преодолевшим звуковой барьер.

Турбинный мотоцикл MTT. Как будто мотоциклы и без этого недостаточно страшны... MTT снабдили свой мотоцикл турбиной Rolls-Royce, которая передает 286 л. с. на заднее колесо. Один из таких принадлежит американскому телеведущему Джею Лено, который описывает его так: "Он веселый, но способен запугать вас до смерти".

Бэтмобиль. Главный транспорт из кинофильмов "Бэтмен" и "Бэтмен возвращается". Построен на шасси Chevrolet Impala. На сегодняшний день существуют компании, которые изготавливают реплики этого бэтмобиля с настоящими газотурбинными двигателями.

Shockwave. Этот седельный тягач Peterbilt оснащен тремя реактивными двигателями Pratt & Whitney J34-48 и однажды разогнался до 605 км/ч. Четверть мили он проезжает за 6,63 секунды, сопровождая свой заезд потрясающим огненным зрелищем!

Big Wind. Это ультимативное средство пожаротушения идеально дополнило бы предыдущий грузовик. Что скажете насчет борьбы с огнем при помощи огня? Big Wind как раз этим и занимается. Он представляет собой два двигателя от МИГ-21, смонтированные на советский танк Т-34. Эти штуки тушили нефтяные пожары в Кувейте во время войны в Персидском заливе. Сначала шесть шлангов гасят огонь, а затем реактивные двигатели нагнетают мощную струю пара, который буквально сдувает пламя с нефти.

Lotus 56. Этот болид имел вертолетный газотурбинный двигатель и был лишен коробки передач, сцепления и системы охлаждения. В 1971 году он дебютировал в Формуле-1. Самой серьёзной проблемой было значительное запаздывание реакции турбины на нажатие газа — поначалу задержка составляла шесть секунд. Это вынуждало пилота открывать газ ещё в торможении перед поворотом. Позднее задержку сократили до трех секунд, но это увеличило расход топлива и стартовый вес. В Сильверстоуне машина отстала на 11 кругов, а в Монце Эмерсону Фиттипальди удалось финишировать восьмым с отставанием в 1 круг. Контрольное взвешивание показало, что Lotus 56 на 101 кг тяжелее машины победителя. Естественно, от него пришлось отказаться.

Газотурбинный автомобиль Chrysler. Эти экспериментальные автомобили так и называют, потому что своего имени у модели не было. Они разрабатывались с 1953 по 1979 годы. За это время Chrysler испытал 7 поколений и построил 77 прототипов. В начале 60-х годов они успешно прошли тесты на дорогах общего пользования, но финансовый кризис в Chrysler и введение новых норм токсичности и расхода топлива помешали запуску модели в массовое производство. Девять машин сохранились в музеях и домашних коллекциях, а остальные были уничтожены.

ГАЗ М20 Аэросани "Север". В 1959 году в вертолетном конструкторском бюро Н. И. Камова был разработан автомобиль-аэросани "Север". Это была поставленная на лыжи "Победа" с авиационным мотором АИ-14 мощностью 260 л. с. Она использовалась как быстроходный транспорт для северных районов страны в зимние периоды. Средняя скорость составляла 35 км/ч. Маршруты проходили по целинному снегу и торосистому льду в морозы до 50 градусов. Аэросани работали вдоль Амура, обслуживали поселки по берегам рек Лена, Обь и Печора.

Трактор. Американцы любят разного рода забавы, и тракторные гонки - одна из них. Главным состязанием является транспортировка трактором тяжеленной платформы на дистанцию 80-100 метров. И тут, конечно, на помощь трактору приходят мощные газотурбинные двигатели.

17 декабря 1979 года автомобиль «Budweiser Rocket», управляемый пилотом Стэном Баррэтом, впервые преодолел звуковой барьер. И хотя официально рекорд не был засчитан, имя пилота и название его болида были навсегда вписаны в историю автомобилестроения планеты. Мы подготовили обзор самых выдающихся автомобилей, претендовавших на преодоление звукового барьера и преодолевших его. Однако, на самом деле этот рассказ не о машинах, а об увлеченных и героических людях, не побоявшихся бросить вызов судьбе.
«The Blue Flame» превышает скорость 1000 км/ч в 1970 году

Не случайно история начинается с болида «The Blue Flame», который хоть и не преодолел звуковой барьер, однако "промчался" совсем рядом с этой отметкой и все-таки поставил рекорд скорости, превысив 1000 км/ч.
Боссы американской компании The American Gas Association, занимающейся добычей и переработкой природного газа, решили прорекламировать свой бизнес, вложив 500 тыс. дол. (огромные деньги по тем временам) в разработку самого быстрого в мире болида. Автомобиль, получивший название «The Blue Flame» - «Голубое пламя», естественно должен был работать на газе.

Разработкой автомобиля-рекордсмена занялись сотрудники Иллинойского технологического института Рэй Даусман и Дик Келлер, а также их друг - гонщик Пит Фарнсуорт. Надо сказать, что эта троица давно грезила созданием самой быстрой машины в мире, к тому времени уже построив несколько достаточно успешных прототипов. Воспользовавшись своими связями в научном мире, талантливые энтузиасты смогли привлечь к работе лучших специалистов. Разработка «The Blue Flame» даже вошла в учебную программу технологического института штата Иллинойс, где над ним трудились профессора, преподаватели и более 70 студентов.

В октябре 1970 года на старт вышла феноменальная машина массой 2950 кг, длинной 11.6 м. и силой тяги ракетного двигателя в 10000 кгс, ставшая апофеозом инженерной мысли. Создатели болида предвкушали будущий триумф, ведь при расчетной скорости автомобиля в 1450 км/ч, звуковой барьер просто обязан был покориться! За руль сел опытный пилот Гэри Габелич, который, в свое время, даже входил в состав экипажа-дублера первого пилотируемого полета на Луну.

На первый взгляд автомобиль имеет три колеса, однако, на самом деле болид четырехколесный, впереди на пружинной подвеске размещена сдвоенная пара колес, почти полностью скрытая корпусом. При этом поворот их настолько мал, что разворачивается машина по окружности радиусом порядка 400 м. Задние колеса размещены без всяких обтекателей на трубчатых фермах. На всех четырех колесах установлены особо прочные гладкие пневматические покрышки Goodyear, которые стали самыми "быстрыми" за всю историю автомобилестроения.
В сентябре 1970 года начались пробные заезды «The Blue Flame». Поначалу, пока болид проходил обкатку, результаты были не самыми выдающимися. Однако в октябре того же года во время 23-го заезда был поставлен мировой рекорд скорости на дистанции 1 км - 1014,294 км/ч.

Возможно, тогда Гэри Габеличу и «Голубому пламени» удалось бы преодолеть и звуковой барьер, однако, как это часто бывает, за дело взялись деловые люди в строгих костюмах. Громкий рекорд в 1000 км/ч уже был достигнут, и спонсоры решили, что пора собирать дивиденды от вложенных средств. Пилота Гэри Габелича и болид « » несколько лет возили по городам США в ходе рекламного тура продукции The American Gas Association. А когда их популярность спала, в 1975 году «The Blue Flame» просто продали за 10 тысяч долларов в институт технологии газопереработки, ранее принимавший участие в создании болида. О Габеличе спонсоры забыли еще раньше. В 1972 году, когда пилот сильно пострадал в аварии, ему даже не оплатили лечения. Так закончилась история смелого гонщика Гарри Габелича и его самой быстрой в мире машины, почти преодолевшей звуковой барьер.
«Budweiser Rocket» преодолевает звуковой барьер со скоростью 1190,344 км/ч в 1979 году


Болид « » стоимостью 900 тыс. дол., разработанный командой инженера Уильяма Фредерика, тоже представляет собой ракету на колесах, созданную для покорения звукового барьера на земной поверхности. Первоначальный вариант конструкции автомобиля предусматривал один жидкостный ракетный двигатель и два стартовых двигателя, работавших на твердом топливе. Фюзеляж машины длинной 12,1 метра выполнен из алюминия, за передним колесом (все колеса болида цельнометаллические) расположены баки с топливом и окислителем. После прохождения через катализаторы топливной системы из окиси водорода выделяется кислород, воспламеняющий жидкое топливо полибутадиен. Примерно за 20 секунд химической реакции создается фантастическая реактивная тяга до 11000 кгс. Перед решающим заездом инженеры пошли на серьезный риск, разместив над основным двигателем еще один, работающий на твердом топливе, дополнительный ракетный двигатель с тягой 2700 кгс, снятый с управляемой ракеты-снаряда «Sidewinder». После этого максимальная расчетная скорость машины массой 1476 кг составляла уже 1450 км/ч, а общая тяга достигала 13500 кгс!

Для рекордного заезда была подобрана идеальная 20-километровая трасса на высохшем озере Роджерс в южной Калифорнии, принадлежащая авиабазе ВВС США Эдвардс. Старт был назначен на 17 декабря 1979 года, в этот день температуре воздуха на трассе была -7°С, поэтому скорость звука составляла «всего» 1177.846 км/ч. Любопытно, что среди наблюдателей находился легендарный генерал ВВС США Чарльз Йегер. Именно он, еще в звании капитана, на реактивном самолете «Bell X-1» впервые в мире преодолел звуковой барьер в 1947 году.

Не смотря на многочисленные сложности и экспромты во время подготовки заезда, техника сработала надежно. Пилот Стэн Баррэт успешно прошел контрольный отрезок пути, выпустив тормозной парашют за 6,5 миль до благополучной остановки болида. Баррэту удалось поставить фантастический рекорд скорости в 1190.344 км/ч (739.66 миль в час), впервые опередив звук на 12,5 км/ч.

А вот дальше начались сложности с бюрократией. К сожалению, разработчики не озаботились приглашением на заезд специалистов из международных организаций для официальной фиксации и сертификации рекорда скорости. И хотя многие эксперты обращают внимание на ударные волны, заметные на фотографиях, а радары базы ВВС пусть и кратковременно, но зафиксировали нужную скорость, официальных лиц эти аргументы не удовлетворили. Существует версия, что болид просто не обладал достаточным запасом топлива и мощностью, поэтому превышение скорости звука хоть и произошло, но оказалось слишком кратковременным, чтобы быть зарегистрированным официально. В любом случае официального признания рекорд Budweiser Rocket так и не получил.
Новый официальный мировой рекорд скорости от Thrust2 в 1983 году

Следующим претендентом на преодоление звукового барьера стал автомобиль Thrust2, оснащенный мощнейшим турбореактивным двигателем. 4 октября 1983 года в пустыне Блэк-Рок (Невада, США) пилот Ричард Нобл на болиде развил скорость 1047.49 км/ч (650.88 миль в час) побив предыдущий официальный рекорд скорости. Его автомобиль был оснащен мотором Rolls-Royce Avon от English Electric Lightning F.3, который использовался с 1959 по 1988 годы. Что интересно, геометрия корпуса болида сильно отличалась от предыдущих претендентов на рекорд, зато колеса Thrust2 были цельнометаллическими, как и у «Budweiser Rocket».

Хотя новый официальный мировой рекорд скорости был установлен, звуковой барьер Ричарду Ноблу так и не покорился, поэтому англичанин начал работу над новым болидом, получившим имя Thrust SSC.
В 1991 году автомобиль Thrust2 был продан за 90 тысяч фунтов. Сегодня его можно увидеть в музее транспорта города Ковентри в Великобритании.
Thrust SSC - первый и единственный болид, официально преодолевший звуковой барьер в 1997 году

Длина Thrust SSC составляет 16,5 метров, ширина 3,7 метров, масса достигает 10,5 тонн. Болид оснащён двумя турбовентиляторными двигателями Rolls-Royce Spey суммарной мощностью в 110 тысяч лошадиных сил (82000 киловатт). Подобные двигатели устанавливались на некоторые самолеты F-4 Phantom II Королевских ВВС. При длине 16.5 метров, и массе 10.5 тонн, расход топлива этого монстра составляет порядка 18 литров в секунду. За 16 секунд Thrust SSC с нуля набирает скорость 1000 км/ч, рекордную скорость 1228 км/ч (766,097 миль в час) болид набрал за половину минуты.


За рулем болида находился пилот Королевских ВВС Энди Грин. Рекорд наземной скорости был установлен 15 октября 1997 года в пустыне Блэк-Рок (Невада, США), на специально подготовленной трассе длиной 21 км. Таким образом впервые за всю историю человечества управляемым наземным транспортным средством официально был преодолён звуковой барьер.


Первая версия гибридного болида Bloodhound SSC была показана в 2010 году на авиа-шоу в Великобритании. Разработчики под руководством все того же Ричарда Нобла планируют побить мировой рекорд скорости за 42 секунды, разогнав автомобиль до 1609 км/ч (1000 миль в час).

Свое имя Bloodhound автомобиль получил в честь ракеты, состоявшей на вооружении армии Великобритании несколько десятилетий. Сверхзвуковой болид Bloodhound SSC имеет длину 12,8 метра при весе 6,5 тонн. Машина оснащена сразу тремя двигателями: гибридным ракетным, реактивным двигателем Eurojet EJ200, которые обычно стоит на истребителях Eurofighter Typhoon, и 12-тицилиндровым V-образным бензиновым двигателем на 800 лошадиных сил. Каждый из этих двигателей предназначен для определенного этапа разгона автомобиля. Что интересно, колеса Bloodhound SSC изготовлены из алюминия и имеют диаметр почти один метр.