Механическая часть электропривода представляет собой систему твердых тел, на движение которых наложены ограничения, определяемые механическими связями Уравнения механических связей устанавливают соотношения между перемещениями в системе, а в тех случаях, когда задаются соотношения между скоростями ее элементов, соответствующие уравнения связей обычно интегрируются В механике такие связи называются голономными В системах с голономными связями число независимых переменных - обобщенных координат, определяющих положение системы, - равно числу степеней свободы системы Известно, что наиболее общей формой записи дифференциальных уравнений движения таких систем являются уравнения движения в обобщенных координатах (уравнения Лагранжа)
где W K - запас кинетической энергии системы, выраженный через обобщенные координаты q i и обобщенные скорости i ; Q i =dA i /dq i - обобщенная сила, определяемая суммой элементарных работ dА 1 всех действующих сил на возможном перемещении dq i , или

где L - функция Лагранжа, Q" i - обобщенная сила, определяемая суммой элементарных работ dA, всех внешних сил на возможном перемещении dq i . Функция Лагранжа представляет собой разность кинетической W K и потенциальной W п энергий системы, выраженных через обобщенные координаты q i и обобщенные скорости i , т е:
Уравнения Лагранжа дают единый и достаточно простой метод математического описания динамических процессов в механической части привода; их число определяется только числом степеней свободы системы.
В качестве обобщенных координат могут быть приняты как различные угловые, так и линейные перемещения в системе Поэтому при математическом описании динамики механической части привода с помощью уравнений Лагранжа предварительного приведения ее элементов к одной скорости не требуется. Однако, как было отмечено, до выполнения операции приведения в большинстве случаев невозможно количественно сопоставлять между собой различные массы системы и жесткости связей между ними, следовательно, невозможно выделить главные массы и главные упругие связи, определяющие минимальное число степеней свободы системы, подлежащее учету при проектировании. Поэтому составление приведенных расчетных механических схем и их возможное упрощение являются первым важным этапом расчета сложных электромеханических систем электропривода независимо от способа получения их математического описания.
Получим уравнения движения, соответствующие обобщенным расчетным механическим схемам электропривода, представленным на рис.1.2. В трехмассовой упругой системе обобщенными координатами являются угловые перемещения масс f 1 ,--f 2 ,--f 3 , им соответствуют обобщенные скорости w 1 , w 2 и w 3 . Функция Лагранжа имеет вид:
Для определения обобщенной силы Q" 1 необходимо вычислить элементарную работу всех приложенных к первой массе моментов на возможном перемещении
Следовательно,
Аналогично определяются две другие обобщенные силы:
Подставляя (1.34) в (1.32) и учитывая (1.35) и (1.36), получаем
следующую систему уравнений движения:

В (1.37) пропорциональные деформациям упругих связей моменты
являются моментами упругого взаимодействия между движущимися массами системы:
С учетом (1.38) систему уравнений движения можно представить в виде

Рассматривая (1.39), можно установить, что уравнения движения приведенных масс электропривода однотипны. Они отражают физический закон (второй закон Ньютона), в соответствии с которым ускорение твердого тела пропорционально сумме всех приложенных к нему моментов (или сил), включая моменты и силы, обусловленные упругим взаимодействием с другими твердыми телами системы.
Очевидно, повторять вывод уравнений движения вновь, переходя к рассмотрению двухмассовой упругой системы, нет необходимости. Движение двухмассовой системы описывается системой (1.39) при J 3 =0 и М 23 =0


Переход от двухмассовой упругой системы к эквивалентному жесткому приведенному механическому звену для большей наглядности его физической сути полезно выполнить в два этапа. Вначале положим механическую связь между первой и второй массами (см. рис.1.2,б) абсолютно жесткой (с 12 =Ґ). Получим двухмассовую жесткую систему, расчетная схема которой показана на рис.1.9. Отличием ее от схемы на рис.1.2,б является равенство скоростей масс w 1 =w 2 =w i , при этом в соответствии со вторым уравнением системы (1.40)
Уравнение (1.41) характеризует нагрузку жесткой механической связи при работе электропривода. Подставив это выражение в первое уравнение системы (1.40), получим
Следовательно, с учетом обозначений на рис.1.2,в М С =М С1 +М с2 ; J S =J 1 +J 2 Уравнение движения электропривода имеет вид
Это уравнение иногда называют основным уравнением движения электропривода. Действительно, значение его для анализа физических процессов в электроприводе исключительно велико. Как будет показано далее, оно правильно описывает движение механической части электропривода в среднем. Поэтому с его помощью можно по известному электромагнитному моменту двигателя и значениям М с и J S оценить среднее значение ускорения электропривода, предсказать время, за которое двигатель достигнет заданной скорости, и решить многие другие практические вопросы даже в тех случаях, когда влияние упругих связей в системе существенно.

Как было отмечено, передачи ряда электроприводов содержат нелинейные кинематические связи, типа кривошипно-шатунных, кулисных и других подобных механизмов. Для таких механизмов радиус приведения является переменной величиной, зависящей от положения механизма, и при получении математического описания необходимо это обстоятельство учитывать. В частности, для приведенной на рис.1.10 схемы кривошипно-шатунного механизма
где R k - радиус кривошипа.
Имея в виду механизмы, аналогичные показанному на рис.1.10, рассмотрим двухмассовую систему, первая масса которой вращается со скоростью двигателя w и представляет собой суммарный приведенный к валу двигателя момент инерции всех жестко и линейно связанных вращающихся элементов J 1 а вторая масса движется с линейной скоростью v и представляет собой суммарную массу т элементов, жестко и линейно связанных с рабочим органом механизма. Связь между скоростями w и v нелинейная, причем r--=--r(f). Для получения уравнения движения такой системы без учета упругих связей воспользуемся уравнением Лагранжа (1.31), приняв в качестве обобщенной координаты угол ф. Вначале определим обобщенную силу:
где М с " - суммарный момент сопротивления от сил, воздействующих на линейно связанные с двигателем массы, приведенный к валу двигателя; F c - результирующая всех сил, приложенных к рабочему органу механизма и линейно связанным с ним элементам; dS - возможное бесконечно малое перемещение массы т. Следовательно,
где r(f)=dS/df - радиус приведения
При наличии нелинейной механической связи рассматриваемого типа момент статической нагрузки механизма содержит пульсирующую составляющую нагрузки, изменяющуюся в функции угла поворота f:
Запас кинетической энергии системы
здесь J S (f)=J 1 +mr 2 (f) - суммарный приведенный к валу двигателя момент инерции системы.

В применении к данному случаю левая часть уравнения (1.31) записывается так:
Таким образом, в рассматриваемом случае уравнение движения жесткого приведенного звена имеет вид
Рассматривая (1.45), нетрудно установить, что при наличии нелинейных механических связей уравнение движения электропривода существенно усложняется, так как становится нелинейным, содержит переменные коэффициенты, зависящие от углового перемещения ротора двигателя, и момент нагрузки, являющийся периодической функцией угла поворота. Сравнив это уравнение с основным уравнением движения (1.42), можно убедиться, что использовать основные уравнение движения электропривода допустимо лишь при постоянстве момента инерции J S =const.
В случаях, когда момент инерции при работе электропривода изменяется из-за внешних воздействий, вне связи с собственным движением, уравнение движения электропривода принимает несколько иной вид Такие условия возникают при работе машин, в которых перемещение рабочего органа по пространственным траекториям осуществляется несколькими индивидуальными электроприводами, предусмотренными для каждой координаты перемещения (экскаваторы, краны, роботы и т.п.). Например, момент инерции электропривода поворота робота зависит от вылета схвата относительно оси вращения. Изменения вылета схвата не зависят от работы электропривода поворота, они определяются движением электропривода изменения вылета. В подобных случаях приведенный момент инерции электропривода поворота следует полагать независимой функцией времени J S (t). Соответственно, левая часть уравнения (1.31) запишется так:
а уравнение движения электропривода примет вид:
Функции J S (t) и M c (t) при этом следует определить путем анализа движения электропривода, вызывающего изменения момента инерции и нагрузки, в рассматриваемом примере это электропривод механизма изменения вылета схвата.
Полученные математические описания динамических процессов в механической части электропривода, представляемой обобщенными схемами, позволяют анализировать возможные режимы движения электропривода. Условием динамического процесса в системе, описываемой (1.42), является dw/dt№0, т.е. наличие изменений скорости электропривода. Для анализа статических режимов работы электропривода необходимо положить dw/dt=0. Соответственно уравнение статического режима работы электропривода с жесткими и линейными механическими связями имеет вид
Если при движении М№М с, dw/dt№0, то имеет место или динамический переходный процесс, или установившийся динамический процесс. Последнее соответствует случаю, когда приложенные к системе моменты содержат периодическую составляющую, которая после переходного процесса определяет принужденное движение системы с периодически изменяющейся скоростью.
В механических системах с нелинейными кинематическими связями (рис.1.10) в соответствии с (1.45) статические режимы работы отсутствуют. Если dw/dt=0 и w=const, в таких системах имеет место установившийся динамический процесс движения. Он обусловлен тем, что массы, движущиеся линейно, совершают принужденное возвратно-поступательное движение, и их скорость и ускорение являются переменными величинами.
С энергетической точки зрения режимы работы электропривода разделяются на двигательные и тормозные, отличающиеся направлением потока энергии через механические передачи привода (см. §1.2). Двигательный режим соответствует прямому направлению передачи механической энергии, вырабатываемой двигателем, к рабочему органу механизма. Этот режим обычно является основным для проектирования механического оборудования, в частности редукторов. Однако при работе электропривода достаточно часто складываются условия для обратной передачи механической энергии от рабочего органа механизма к двигателю, который при этом должен работать в тормозном режиме. В частности, для электроприводов с активной нагрузкой двигательный и тормозной режимы работы вероятны практически в равной степени. Тормозные режимы работы электропривода возникают также в переходных процессах замедления системы, в которых освобождающаяся кинетическая энергия может поступать от соответствующих масс к двигателю.
Изложенные положения позволяют сформулировать правило знаков момента двигателя, которое следует иметь в виду при использовании полученных уравнений движения. При прямом направлении передачи механической мощности Р=Мw ее знак положителен, следовательно, движущие моменты двигателя должны иметь знак, совпадающий со знаком скорости. В тормозном режиме Р<О, поэтому тормозные моменты двигателя должны иметь знак, противоположный знаку скорости.
При записи уравнений движения были учтены направления моментов, показанные на обобщенных расчетных схемах, в частности на рис.1.2,в. Поэтому правило знаков для моментов статической нагрузки другое: тормозные моменты нагрузки должны иметь знак, совпадающий со знаком скорости, а движущие активные нагрузки - знак, противоположный знаку скорости.
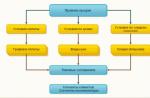
Расчетная схема механической части электропривода
Механика электропривода
Электропривод представляет собой электромеханическую систему, состоящую из электрической и механической части. В этой главе мы рассмотрим механическую часть ЭП.
В общем случае механическая часть ЭП включает в себя механическую часть электромеханического преобразователя (ротор или якорь электродвигателя), преобразователь механической энергии (редуктор или механическую передачу) и исполнительный орган рабочей машины (ИО РМ). Поскольку наша задача - это приведение в движение ИО РМ, основополагающими для выбора и расчета ЭП являются характеристики рабочей машины и особенности механической части ЭП .
В общем случае механическая часть ЭП представляет собой сложную механическую систему, состоящую из нескольких вращающихся и поступательно движущихся с различными скоростями звеньев, имеющими различные массы и моменты инерции, соединенные упругими связями (малой или конечной жесткости). При этом в кинематических передачах часто имеют место зазоры.
На эту сложную механическую систему действуют различные по направлению и величине внешние моменты и силы, которые, в свою очередь, часто зависят от времени, угла поворота механизма, скорости движения и других факторов. Поскольку эта механическая система является неотъемлемой частью ЭП, необходимо знать её характеристики и иметь достаточно точное для инженерных расчетов математическое описание. Механическая часть ЭП описывается в общем случае системой нелинейных дифференциальных уравнений в частных производных с переменными коэффициентами. Для описания механической части ЭП наиболее удобным является использование уравнений Лагранжа второго рода.
Учитывая, что движение механической системы определяется наибольшими массами, наименьшими жесткостями и наибольшими зазорами; очень часто сложную механическую систему можно свести к двух-трех- массовой модели, которая может быть использована при расчете систем ЭП. (Это системы с гибкими валами, системы, подверженные резким динамическим нагрузкам, точные следящие системы).
В большинстве случаев механическая часть состоит из звеньев большой жесткости с жесткими связями, а зазоры мы стремимся свести к нулю, и тогда возникает возможность представить расчетную схему механической части как одномассовую систему, укрепленную на валу ЭД, при этом мы пренебрегаем упругостью механических связей и зазорами в передаче. Такая модель широко применяется для инженерных расчетов.
Для анализа движения механической части ЭП осуществляется переход от реальной кинематической схемы к расчетной, в которой массы и моменты инерции движущихся элементов их жесткости, а также силы и моменты, действующие на эти элементы, заменены эквивалентными величинами, приведенными к одной и той же скорости (чаще всего к скорости движения ЭД). Условием соответствия полученной расчетной схемы реальной механической части ЭП является выполнение закона сохранения энергии.
Рис. 2.1. Кинематическая схема подъемного устройства
Переход от реальной схемы (рис. 2.1) к расчетной (рис. 2.2) называют приведением. Все параметры механической части приводят к валу ЭД (в некоторых случаях к валу редуктора).
Рис. 2.2. Расчетная схема подъемного устройства
Приведение моментов инерции и масс осуществляется с помощью следующих известных из механики формул:
Для вращательного движения, (2.1)
Для поступательного движения, (2.2)
Суммарный момент инерции системы, (2.3)
где – момент инерции двигателя, кг∙м 2 ;
– момент инерции k-ого вращающегося элемента, кг∙м 2 ;
– масса i-ого поступательно движущегося элемента, кг;
, – приведённые моменты инерции k и i элементов, кг∙м 2 .
Моментом инерции тела относительно оси, проходящей через центр тяжести, называют сумму произведений массы каждой элементарной частицы тела на квадрат расстояния от соответствующей частицы до оси вращения
где R j – радиус инерции
i k – передаточное число кинематической цепи между валом двигателя и k-ым элементом,
– угловые скорости вала двигателя и k-ого элемента, с -1 .
где – радиус приведения поступательно движущегося i элемента к валу двигателя, м,
– скорость движения поступательно движущегося i элемента, м/с.
Радиусом инерции называют расстояние от оси вращения (проходящей через центр тяжести), на котором надо поместить массу рассматриваемого тела, сосредоточенную в одной точке, чтобы удовлетворить равенство
Приведение моментов и сил , действующих на элементы к валу двигателя, осуществляются следующим образом:
Первый вариант: передача энергии от двигателя к рабочей машине
Для вращательно движущихся элементов, (2.6)
Для поступательно движущихся элементов. (2.7)
Второй вариант: энергия передается от рабочей машины к двигателю
Для вращательно движущихся элементов, (2.8)
Для поступательно движущихся элементов. (2.9)
В этих выражениях:
– момент, действующий на k элемент, Н∙м;
– сила, действующая на i элемент, Н;
– приведённый момент (эквивалентный), Н∙м;
– КПД кинематической цепи между k и i элементом и валом двигателя.
С помощью приведенных расчётных схем осуществляется определение параметров, устойчивость и характер протекания переходных процессов в механической системе.
Динамику ЭП, как правило, определяет механическая часть привода как более инерционная. Для описания переходных режимов необходимо составить уравнение движения ЭП учитывающее все силы и моменты, действующие в переходных режимах .
Наиболее удобным методом составления уравнений движения механизмов является метод уравнений Лагранжа второго рода. Сложность уравнения движения будет зависеть от того, какую расчетную схему механической части привода мы выбрали. В большинстве практических случаев выбирают одномассовую, расчетную схему, сводя всю систему электродвигатель-рабочая машина (ЭД-РМ) к жесткому приведенному механическому звену.
Одномассовая система (жесткое приведённое звено) является интегрирующим звеном. В том случае, когда в кинематической цепи ЭП содержатся нелинейные связи, параметры которых зависят от положения отдельных звеньев механизма (пары кривошип – шатун, кулисный механизм и так далее) движение одномассовой системы описывается нелинейным дифференциальным уравнением с переменными коэффициентами. Входящие в это уравнение моменты в общем случае могут быть функциями нескольких переменных (времени, скорости, угла поворота).
Как следует из структурной схемы, момент двигателя представляет собой управляющее воздействие, а момент сопротивления - возмущающее воздействие.
Основное уравнение движения электропривода.
Для электромеханической системы в любой момент времени должно выполняться условие баланса мощностей:
где
 - мощность, отдаваемая двигателем на
вал;
- мощность, отдаваемая двигателем на
вал;
 - мощность статических сил сопротивления;
- мощность статических сил сопротивления;
 - динамическая мощность, идет на изменение
кинетической энергии
- динамическая мощность, идет на изменение
кинетической энергии в процессах, когда изменяется скорость
двигателя.
в процессах, когда изменяется скорость
двигателя.
В свою очередь уравнение для кинетической энергии запишется:

Или для динамической мощности:

Если
 и
и меняются во времени, то получим:
меняются во времени, то получим:

Приравняв значения мощностей, получим:

Эта зависимость является уравнением
движения электропривода. Для большинства
механизмов
 .
Тогда уравнение примет вид:
.
Тогда уравнение примет вид:

Проанализируем это уравнение:

Основное уравнение движения электропривода является основой всех инженерных расчетов. На его основе производится расчет, например, диаграммы двигателя, выбирается двигатель, рассчитываются пусковые моменты и токи, оценивается динамика электропривода.
Основные понятия об устойчивости электропривода.
Устойчивость электропривода определяется
при сравнении механической характеристики
двигателя и механической характеристики
исполнительного механизма ( и
и ).
Рассмотрим на примере АД.
).
Рассмотрим на примере АД.

Рассмотрим для трех механических характеристик исполнительных механизмов:

В этом режиме двигатель преодолевает момент нагрузки и момент механических потерь. Режим работы устойчивый.

В таком режиме мы имеем две точки
пересечения (2 и 3). Устойчивой является
скорость
 .
Потому, что небольшое отклонение скорости
компенсируется изменением момента
противоположного знака (wMилиwM).
.
Потому, что небольшое отклонение скорости
компенсируется изменением момента
противоположного знака (wMилиwM).
Для точки 3 wM.
Определение времени пуска и торможения электропривода
Время пуска можно определить исходя из основного уравнения движения электропривода:
 .
.
Выделим из этого уравнения составляющую времени:
 ;
;
Проинтегрировав это выражение получим:
 .
.
Данным уравнением определяется время нарастания скорости от 0 до конечной (установившейся).
Время торможения может быть вычислено по следующей формуле:

Тепловые режимы работы электропривода. Особенности расчета и выбора мощности электродвигателей в различных тепловых режимах.
Режим работы электрической машины – это установленный порядок чередования периодов, характеризуемых величиной и продолжительностью нагрузки, отключений, торможения, пуска и реверса во время ее работы.
1. Продолжительный режим
S
1
– когда при неизменной номинальной
нагрузке работа двигателя продолжается так
долго, что температура перегрева всех
его частей успевает достигнуть
установившихся значений
работа двигателя продолжается так
долго, что температура перегрева всех
его частей успевает достигнуть
установившихся значений .
Различают продолжительный режимнеизменной нагрузкой
(рисунок 1) и
сизменяющейся нагрузкой
(рисунок
2).
.
Различают продолжительный режимнеизменной нагрузкой
(рисунок 1) и
сизменяющейся нагрузкой
(рисунок
2).
2. Кратковременный режим
S
2
– когда периоды неизменной номинальной
нагрузки чередуются с периодами
отключения двигателя (рисунок 3). При
этом периоды работы двигателя настолько кратковременны, что температуры
нагрева всех частей двигателя не
достигает установившихся значений, а
периоды отключения двигателя настолько
продолжительны, что все части двигателя
успевают охладиться до температуры
окружающей среды. Стандартом установлены
длительность периодов нагрузки 10, 30, 60
и 90 минут. В условном обозначении
кратковременного режима указывается
продолжительность периода нагрузки,
напримерS2 – 30 мин.
настолько кратковременны, что температуры
нагрева всех частей двигателя не
достигает установившихся значений, а
периоды отключения двигателя настолько
продолжительны, что все части двигателя
успевают охладиться до температуры
окружающей среды. Стандартом установлены
длительность периодов нагрузки 10, 30, 60
и 90 минут. В условном обозначении
кратковременного режима указывается
продолжительность периода нагрузки,
напримерS2 – 30 мин.
3. Повторно-кратковременный режим S3
– когда кратковременные периоды работы
двигателя чередуются с периодами отключения
двигателя
чередуются с периодами отключения
двигателя ,
причем за период работы
,
причем за период работы превышение температуры не успевает
достигнуть установившихся значений, а
за время паузы части двигателя не
успевают охладиться до температуры
окружающей среды. Общее время работы в
повторно-кратковременном режиме
разделяются на периодически повторяющиеся
циклы продолжительностью
превышение температуры не успевает
достигнуть установившихся значений, а
за время паузы части двигателя не
успевают охладиться до температуры
окружающей среды. Общее время работы в
повторно-кратковременном режиме
разделяются на периодически повторяющиеся
циклы продолжительностью .
.
При повторно-кратковременном режиме
работы график нагревания двигателя
имеет вид пилообразной
кривой (рисунок 4).
При достижении двигателем
установившегося значения температуры
перегрева, соответствующего
повторно-кратковременному режиму
 ,температура
перегрева двигателя
продолжает колебаться от
,температура
перегрева двигателя
продолжает колебаться от  до
до  .
При этом
.
При этом  меньше
установившейся
температуры перегрева, которая
наступила бы, если режим работы
двигателя был продолжительным
(
меньше
установившейся
температуры перегрева, которая
наступила бы, если режим работы
двигателя был продолжительным
( <
< ).
).
Повторно-кратковременный
режим характеризуется
относительной
продол
жительностью
включения:
 .
Действующим стандартом
предусмотрены
номинальные повторно-кратковременные
режимы с ПВ 15, 25, 40 и 60 % (для продолжительного
режима ПВ=100%).
В
условном обозначении
повторно-кратковременного режима
указывают величину ПВ, например,
S3-40%.
.
Действующим стандартом
предусмотрены
номинальные повторно-кратковременные
режимы с ПВ 15, 25, 40 и 60 % (для продолжительного
режима ПВ=100%).
В
условном обозначении
повторно-кратковременного режима
указывают величину ПВ, например,
S3-40%.
При выборе двигателя, в паспорте которого, указана мощность при ПВ=100% пересчет следует делать по формуле:
 .
.
Рассмотренные три номинальных режима считаются основными. Также стандартом предусмотрены дополнительные режимы:
повторно-кратковременный режим S4 с частыми пусками, с числом включений в час 30, 60, 120 или 240;
повторно-кратковременный режим S5 с частыми пусками и электрическим торможением в конце каждого цикла;
перемещающийся режим S6 с частыми реверсами и электрическим торможением;
перемещающийся режим S7 с частыми пусками, реверсами и электрическим торможением;
перемещающийся режим S8 с двумя и более разными частотами вращения;

 Рисунок 1
Рисунок
2
Рисунок 1
Рисунок
2


Рисунок3 Рисунок 4
| " |
суммой момента двигателя и момента сопротивления. В отдельных случаях момент двигателя, равно как и момент сопротивления, может быть направлен как в сторону движения ротора, так и против этого движения. Однако во всех случаях независимо от движущего или тормозного характера момента двигателя и момента сопротивления в задачах электропривода выделяются именно указанные составляющие результирующего момента. Последнее определяется тем, что чаще всего момент сопротивления задан заранее, а момент двигателя выявляется в процессе расчета и тесно связан с величинами токов в его обмотках, которые позволяют оценить нагрев двигателя.
В системах электропривода основным режимом работы электрической машины является двигательный. При этом момент сопротивления имеет тормозящий характер по отношению к движению ротора и действует навстречу моменту двигателя. Поэтому положительное направление момента сопротивления принимают противоположным положительному направлению момента двигателя, в результате чего уравнение (2.8) при J = const может быть представлено в виде:
Уравнение (2.9) называют основным уравнением движения электропривода. В уравнении (2.9) моменты являются алгебраическими, а нс векторными величинами, поскольку оба момента М и действуют относительно одной и той же оси вращения.
![]()
где угловое ускорение при вращательном движении.
Правую часть уравнения (2.9) называют динамическим моментом (), т. е.
Из (2.10) следует, что направление динамического момента всегда совпадает с направлением ускорения электропривода.
В зависимости от знака динамического момента различают следующие режимы работы электропривода:
Момент, развиваемый двигателем, не является постоянной величиной, а представляет собой функцию какой-либо одной переменной, а в некоторых случаях и нескольких переменных. Эта функция задается аналитически или графически для всех возможных областей ее изменения. Момент сопротивления также может быть функцией какой-либо переменной: скорости, пути, времени. Подстановка в уравнение движения вместо М и Л/с их функций приводит в общем случае к нелинейному дифференциальному уравнению.
Уравнение движения в дифференциальной форме (2.9) справедливо для постоянного радиуса инерции вращающейся массы. В некоторых случаях, например при наличии кривошипно-шатунного механизма (см. рис. 2.2, г), в кинематической цепи привода радиус инерции оказывается периодической функцией угла поворота. В этом случае можно воспользоваться интегральной формой записи уравнения движения, исходящей из баланса кинетической энергии в системе:
![]() (2.11)
(2.11)
где J((o !/2) – запас кинетической энергии привода для рассматриваемого момента времени; 7,(0)^,/2) – начальный запас кинетической энергии привода.
Дифференцируя уравнение (2.11) по времени с учетом того факта, что 7 – функция угла поворота <р, получаем:
![]() (2.12)
(2.12)
Так как , то, разделив (2.12) на угловую скорость <о, получим уравнение движения при 7 =J[
![]() (2.13)
(2.13)
В ряде случаев целесообразно рассматривать движение на рабочем органе производственной машины (такие задачи часто возникают для подъемно-транспортных машин с поступательно движущимся рабочим органом). В этом случае следует использовать уравнения для поступательного движения. Уравнение движения электропривода для поступательного движения получают так же, как и для вращательного движения. Так при т = const уравнение движения принимает вид:
При т =f}