Рулевое устройство служит для изменения направления движения судна или удерживать его на заданном курсе. В последнем случае задачей рулевого устройства является противодействие внешним силам, таким как ветер или течение, которые могут привести к отклонению судна от заданного курса.
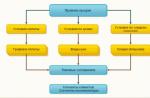
Рулевые устройства известны с момента возникновения первых плавучих средств. В древности рулевые устройства представляли собой большие распашные весла, укрепленные на корме, на одном борту или на обоих бортах судна. Во времена средневековья их стали заменять шарнирным рулем, который помещался на ахтерштевне в диаметральной плоскости судна. В таком виде он и сохранился до наших дней. Рулевое устройство состоит из руля, баллера, рулевого привода, рулевой передачи, рулевой машины и поста управления (рис. 6.1).

Рулевое устройство должно иметь два привода: главный и вспомогательный.
Главный рулевой привод
- это механизмы, исполнительные приводы перекладки руля, силовые агрегаты рулевого привода, а также вспомогательное оборудование и средства приложения крутящего момента к баллеру (например, румпель или сектор), необходимые для перекладки руля с целью управления судном в нормальных условиях эксплуатации.
Вспомогательный рулевой привод
– это оборудование необходимое для управления судном в случае выхода из строя главного рулевого привода, за исключением румпеля, сектора или других элементов, предназначенных для той же цели.
Главный рулевой привод должен обеспечивать перекладку руля с 350 одного борта на 350 другого борта при максимальной эксплуатационной осадке и скорости переднего хода судна не более чем за 28 секунд.
Вспомогательный рулевой привод должен обеспечивать перекладку руля с 150 одного борта на 150 другого борта не более чем за 60 секунд при максимальной эксплуатационной осадке судна и скорости, равной половине его максимальной эксплуатационной скорости переднего хода.
Управление вспомогательным рулевым приводом должно быть предусмотрено из румпельного отделения. Переход с главного на вспомогательный привод должен выполняться за время, не превышающее 2 минуты.
Руль
– основная часть рулевого устройства. Он располагается в кормовой части и действует только на ходу судна. Основной элемент руля – перо, которое по форме может быть плоским (пластинчатым) или обтекаемым (профилированным).
По положению пера руля относительно оси вращения баллера различают (рис. 6.2):
- обыкновенный руль – плоскость пера руля расположена за осью вращения;
- полубалансирный руль – только большая часть пера руля находится позади оси вращения, за счет чего возникает уменьшенный момент вращения при перекладке руля;
- балансирный руль – перо руля так расположено по обеим сторонам оси вращения, что при перекладке руля не возникают какие-либо значительные моменты.

В зависимости от принципа действия различают пассивные и активные рули. Пассивными называются рулевые устройства, позволяющие производить поворот судна только во время хода, точнее сказать, во время движения воды относительно корпуса судна.
Винторулевой комплекс судов не обеспечивает их необходимую маневренность при движении на малых скоростях. Поэтому на многих судах для улучшения маневренных характеристик используются средства активного управления, которые позволяют создавать силу тяги в направлениях, отличных от направления диаметральной плоскости судна. К ним относятся: активные рули, подруливающие
устройства, поворотные винтовые колонки и раздельные поворотные насадки.
 Активный руль
– это руль с установленным на нем вспомогательным винтом, расположенным на задней кромке пера руля (рис. 6.3). В перо руля встроен электродвигатель, приводящий во вращение гребной винт, который для защиты от повреждений помещен в насадку. За счет поворота пера руля вместе с гребным винтом на определенный угол возникает поперечный упор, обусловливающий поворот судна. Активный руль используется на малых скоростях до 5 узлов. При маневрировании на стесненных акваториях активный руль может использоваться в качестве основного движителя, что обеспечивает высокие маневренные качества судна. При больших скоростях винт активного руля отключается, и перекладка руля осуществляется в обычном режиме.
Активный руль
– это руль с установленным на нем вспомогательным винтом, расположенным на задней кромке пера руля (рис. 6.3). В перо руля встроен электродвигатель, приводящий во вращение гребной винт, который для защиты от повреждений помещен в насадку. За счет поворота пера руля вместе с гребным винтом на определенный угол возникает поперечный упор, обусловливающий поворот судна. Активный руль используется на малых скоростях до 5 узлов. При маневрировании на стесненных акваториях активный руль может использоваться в качестве основного движителя, что обеспечивает высокие маневренные качества судна. При больших скоростях винт активного руля отключается, и перекладка руля осуществляется в обычном режиме. Раздельные поворотные насадки
(рис. 6.4). Поворотная насадка – это стальное кольцо, профиль которого представляет элемент крыла. Площадь входного отверстия насадки больше площади выходного. Гребной винт располагается в наиболее узком ее сечении. Поворотная насадка устанавливается на баллере и поворачивается до 40° на каждый борт, заменяя руль. Раздельные поворотные насадки установлены на многих транспортных судах, главным образом речных и смешанного плавания, и обеспечивают их высокие маневренные характеристики.
Раздельные поворотные насадки
(рис. 6.4). Поворотная насадка – это стальное кольцо, профиль которого представляет элемент крыла. Площадь входного отверстия насадки больше площади выходного. Гребной винт располагается в наиболее узком ее сечении. Поворотная насадка устанавливается на баллере и поворачивается до 40° на каждый борт, заменяя руль. Раздельные поворотные насадки установлены на многих транспортных судах, главным образом речных и смешанного плавания, и обеспечивают их высокие маневренные характеристики.
 Подруливающие устройства
(рис. 6.5). Необходимость создания эффективных средств управления носовой оконечностью судна привела к оборудованию судов подруливающими устройствами. ПУ создают силу тяги в направлении, перпендикулярном диаметральной плоскости судна независимо от работы главных движителей и рулевого устройства. Подруливающими устройствами оборудовано большое количество судов самого разного назначения. В сочетании с винтом и рулем ПУ обеспечивает высокую маневренность судна, возможность разворота на месте при отсутствии хода, отход или подход к причалу практически лагом.
Подруливающие устройства
(рис. 6.5). Необходимость создания эффективных средств управления носовой оконечностью судна привела к оборудованию судов подруливающими устройствами. ПУ создают силу тяги в направлении, перпендикулярном диаметральной плоскости судна независимо от работы главных движителей и рулевого устройства. Подруливающими устройствами оборудовано большое количество судов самого разного назначения. В сочетании с винтом и рулем ПУ обеспечивает высокую маневренность судна, возможность разворота на месте при отсутствии хода, отход или подход к причалу практически лагом.
В последнее время получила распространение электродвижущаяся система AZIPOD (Azimuthing Electric Propulsion Drive), которая включает в себя дизельгенератор, электромотор и винт (рис. 6.6).

Дизель-генератор, расположенный в машинном отделении судна, вырабатывает электроэнергию, которая по кабельным соединениям передается на электромотор. Элетромотор, обеспечивающий вращение винта, расположен в специальной гондоле. Винт находится на горизонтальной оси, уменьшается количество механических передач. Винторулевая колонка имеет угол разворота до 3600, что значительно повышает управляемость судна.
Достоинства AZIPOD:
– экономия времени и средств при постройке;
– великолепная маневренность;
– уменьшается расход топлива на 10 – 20 %;
– уменьшается вибрация корпуса судна;
– из-за того, что диаметр гребного винта меньше – эффект кавитации снижен;
– отсутствует эффект резонанса гребного винта. Один из примеров использования AZIPOD – танкер двойного действия (рис.6.7), который на открытой воде двигается как обычное судно, а во льдах двигается кормой вперёд как ледокол. Для ледового плавания кормовая часть DAT оснащена ледовым подкреплением для ломки льда и AZIPOD.
Один из примеров использования AZIPOD – танкер двойного действия (рис.6.7), который на открытой воде двигается как обычное судно, а во льдах двигается кормой вперёд как ледокол. Для ледового плавания кормовая часть DAT оснащена ледовым подкреплением для ломки льда и AZIPOD. На рис. 6.8. показана схема расположения приборов и пультов управления: один пульт для управления судном при движении вперед, второй пульт для управления судном при движении кормой вперед и два пульта управления на крыльях мостика.
На рис. 6.8. показана схема расположения приборов и пультов управления: один пульт для управления судном при движении вперед, второй пульт для управления судном при движении кормой вперед и два пульта управления на крыльях мостика.
Рулевая машина обеспечивает поворот руля в соответствии с сигналом с мостика и является составной частью рулевого устройства.
Рулевое устройство состоит из четырех частей:
– системы управления,
– силового агрегата,
– рулевого привода,
Силовой агрегат и рулевой привод образуют собственно рулевую машину.
Система управления или телепередача передает с мостика сигнал на поворот руля и обеспечивает работу силового агрегата и рулевого привода до тех пор, пока не будет достигнут заданный угол поворота руля. Силовой агрегат создает усилие, необходимое для поворота руля на заданный угол. Рулевой привод – это устройство, посредством которого осуществляется движение непосредственно руля.
Рулевое устройство должно удовлетворять следующим требованиям:
– иметь два независимых средства перекладки руля (при наличии двух силовых агрегатов, вспомогательный или резервный силовой агрегат не требуется);
– мощность и вращающий момент агрегата должны быть такими, чтобы перекладка руля с 35 одного борта на 30 другого осуществлялась при максимальной скорости судна за время не превышающее 28 с;
– вспомогательный рулевой привод должен обеспечивать перекладку руля с 15 одного борта на 15 другого не более чем за 60 с при скорости переднего хода, равной половине максимальной, но не менее 7 узлов;
– рулевая машина должна быть защищена от ударных нагрузок;
– должно быть предусмотрено аварийное управление рулевой машиной из румпельного отделения;
– танкеры, имеющие валовую вместимость более 10 000 р.т, должны иметь две независимые системы управления рулевой машиной с мостика.
Рулевые машины могут иметь паровой, электрический и гидравлический привод.
На современных морских судах используются рулевые машины с гидравлическим плунжерным либо лопастным приводом.
5.10.2. Электрогидравлические рулевые машины
Электрогидравлические рулевые машины состоят из следующих основных узлов:
– гидравлического рулевого привода – устройства, поворачивающего баллер руля;
– насосного агрегата (насос и двигатель), обеспечивающего питание гидравлических рулевых приводов рабочей жидкостью;
– органов распределения рабочей жидкости и системы управления насосами и распределением рабочей жидкости;
– системы трубопроводов питания, предохранительных клапанов, компенсаторов; динамических нагрузок, ограничителей мощности и других элементов в зависимости от конструкции рулевой машины.
Гидравлические рулевые приводы – это гидродвигатели, обеспечивающие ограниченные углы поворота исполнительного вала, которым является баллер руля. Наиболее широкое распространение получили плунжерные приводы. В зависимости от значения необходимого вращающего момента применяется двух– либо четырех плунжерный привод. Принципиальная схема такого привода показана на рис. 74.
Рис. 74. Принципиальная схема плунжерного привода:
1– электродвигатель насоса, 2– насос, 3– предохранительный клапан, 4– муфта, 5– румпель, 6– цилиндр, 7– цистерна
Плунжеры движутся в гидравлических цилиндрах, поворачивая румпель шарнирной крестовины, находящейся в развилке плунжеров. Привод обслуживается двумя насосами переменной подачи. Каждый из насосов сообщается трубопроводами со всеми гидравлическими цилиндрами рулевого привода для всасывания и нагнетания масла.
Рядом с цилиндрами находится масляная цистерна, которая снабжена невозвратными клапанами для автоматического пополнения утечек масла из системы. Байпасный клапан объединен с предохранительным клапаном и открывается для перепуска масла в случае сильных ударов волны в перо руля. В этом случае плунжера смещаются, что в свою очередь, вызывает изменение подачи насоса, который нагнетает масло в соответствующий цилиндр, и перо руля возвращается в прежнее положение. Для защиты от поломки рычагов управления при ударной нагрузке используется буферная пружина. При обычных условиях эксплуатации работает один из насосов. Если требуется обеспечить ускоренную перекладку руля, оба насоса могут использоваться одновременно.
На рис. 75 показано устройство 4-х плунжерной электрогидравлической рулевой машины.
Такая машина создает больший вращающий момент и имеет повышенную надежность в случае выхода из строя различных частей установки. Каждый насос может работать на все цилиндры или на два цилиндра правого или левого борта.
Наличие блока клапанов управления, объединяющего предохранительные клапаны, запорные клапаны насосов и цилиндров, байпасные клапаны, повышает живучесть рулевой машины.
При нормальных условиях один насос может обеспечить работу всех цилиндров. В аварийной ситуации могут быть использованы два насоса с ручным управлением для работы двух плунжеров правого борта, двух – левого борта, двух носовых или двух кормовых плунжеров.

Рис. 75. 4-х плунжерная электро-гидравлическая рулевая машина:
1 ,23,25 – насосы переменной подачи, 2,9,19,22 – запорные клапаны цилиндров, 3,10,18,21 – гидравлические цилиндры с плунжерами, 4,8,17,24 – воздушные и манометровые запорные клапаны, 5,7,40,47,48 – масляные трубопроводы цилиндров,6,16,20 – электродвигатели, 11,27 – байпасные клапаны, 12,37 – соединительные звенья, 13,26 – плавающие рычаги, 14 – тяга буферной пружины, 15 – румпель, 28 – маховик местного поста управления, 29,30,31,32,33,34 – невозвратные всасывающие пополнительные клапаны, 35 – приемник телемотора, 36– соединительная тяга насосов, 38,39,49,50,51,52 – запорные клапаны насосов, 41,42,43, 44,45,46,53,54 – масляные трубопроводы между клапанами, 55 – цистерна пополнения масла.
Для того, чтобы система была готова к работе, необходимо заполнить маслом каждый цилиндр рулевого привода, затем установить на место наполнительные пробки и закрыть воздушные краны. Байпасные клапаны при этом должны быть открыты, а цистерна для пополнения заполнена. Воздушные краны на насосах оставляют открытыми до тех пор, пока вытекающее масло содержит пузырьки воздуха. Используя механизм ручного управления, насосы ставят в положение минимальной подачи и проворачивают их вручную, удаляя воздух сначала из одной а затем из другой пар цилиндров. После этого включают электродвигатель насоса и приступают к проверке рулевой машины в действии. При этом еще раз удаляют воздух из цилиндров и насосов через соответствующие краны.
В электрогидравлических рулевых машинах с роторным лопастным приводом рис. 76 лопастной ротор прочно закреплен на баллере.


Рис. 76. Лопастной электро-гидравлический привод:
а – принципиальная схема, б – разрез, 1 – электродвигатель, 2 – насосы, 3 – предохранительный клапан, 4 – корпус, 5 – баллер, 6 – ротор, 7 – масляная полость, 8 – масляная цистерна, 9 – крышка
Ротор может поворачиваться в корпусе, который крепится к судовому набору. Пространство между лопастями ротора и перемычками корпуса образуют полости, объем которых изменяется при повороте ротора. Полости уплотнены специальной набивкой. С обеих сторон поворотных лопастей подведены трубопроводы, каждый из которых имеет кольцевой коллектор. При подаче масла во все полости с левой стороны поворотных лопастей и при всасывании масла из всех полостей с правой стороны обеспечивается поворот ротора по часовой стрелке. Для поворота в противоположном направлении всасывание и нагнетание меняются местами.
Привод обычно имеет три лопасти, благодаря чему обеспечивается перекладка руля на 70 0 .
Перемычки корпуса выполняют функцию стопоров, ограничивающих поворот руля.
Рулевая машина - один из основных вспомогательных механизмов судна, так как она обеспечивает его управляемость и безопасность плавания. В соответствии с условиями плавания рулевая машина поворачивает баллер руля или насадку на заданные углы для удержания судна на курсе или для маневрирования.
Рулевые приводы, передающие усилия непосредственно баллеру руля, выполняются с механическими или гидравлическими передачами, а их двигатели могут быть паровыми и электрическими. В настоящее время паровые рулевые машины на новых судах не устанавливаются.
Рулевые машины с механической передачей от электродвигателя принято называть электрическими, а машины с гидравлическими передачами от электродвигателя - гидравлическими. Современные рулевые машины устанавливают непосредственно у головы баллера в румпельном помещении, а для управления ими применяются электрические или гидравлические телепередачи.
Ко всякому рулевому устройству предъявляются следующие требования:
- надежность и безопасность работы при любых навигационных условиях;
- живучесть;
- обеспечение заданного угла и заданной скорости перекладки руля при максимальной скорости судна;
- возможность быстрого перехода от основного вида управления к вспомогательному;
- возможность управления с нескольких мест;
- удобство управления, наименьшие габаритные размеры и масса;
- простота устройства, ухода и обслуживания;
- экономичность.
Правилами Регистра сформулированы следующие основные требования к рулевому устройству судна.
- Рулевое устройство, или устройство с поворотной насадкой, должно иметь два привода: главный и вспомогательный.
- При действии главного рулевого привода рулевое устройство должно обеспечить маневрирование судна с перекладкой полностью погруженного руля (насадки) с борта на борт при максимальной скорости переднего хода; при этом время перекладки, руля (насадки) с 35° одного борта на 30° другого борта не должно превышать 28 с.
- Вспомогательный рулевой привод должен обеспечивать маневрирование судна с перекладкой полностью погруженного руля (насадки) с борта на борт при скорости переднего хода, равной 1/2 максимальной скорости судна, но не менее 7 уз.; при этом время перекладки руля (насадки) с 15° одного борта на 15° другого борта не должно превышать 60 с.
- Вспомогательного привода не требуется, если главный рулевой привод состоит из двух независимо действующих агрегатов, каждый из которых удовлетворяет требованиям к главному приводу. Двигатели рулевых приводов должны допускать их перегрузку по моменту не менее 1,5 расчетного момента в течение 1 мин.
- Вспомогательный ручной привод должен быть самотормозящим или иметь стопорное устройство. Он должен обеспечить требования к нему при работе не более четырех человек с усилием на рукоятках штурвала не более 160Н на каждого работающего.
- Конструкция приводов должна обеспечивать переход с основного рулевого привода на запасной за время не более 2 мин.
- Рулевое устройство должно иметь тормоз или иное приспособление, обеспечивающее удержание руля в любом положении. На рулевом приводе должна быть шкала для определения действительного положения руля с ценой деления не более 1º.
- Все детали рулевого привода должны быть рассчитаны на усилия, соответствующие моменту (кНм) на баллере не менее
М пр = 1,135 R ен d -4
где d - диаметр головки баллера, см; R eн - верхний предел текучести материала баллера, МПа.
При этом напряжения и деталях привода не должны превышать 0,95 предела текучести материала.
При действии расчетного крутящего момента приведенные напряжения в деталях рулевых приводов не должны превышать 0,4 предела текучести материала.
Поворот судна выполняется с помощью руля, который установлен в корме судна. При отклонении или, как принято говорить, при перекладке руля на тот или иной борт на руль будет действовать сила давления воды. Эта сила создает вращающий момент, поворачивающий судно в сторону того борта, на который был переложен руль. Чтобы переложить руль, к нему прикладывают некоторый момент, величина которого, а следовательно, и мощность рулевой машины зависят от силы давления воды на руль и отстояния точки приложения равнодействующей сил давления от оси вращения.
В зависимости от расположения оси вращения рули делятся на два типа (рис. 73): небалансирные и балансирные. Ось вращения небалансирного руля проходит по передней кромке пера руля, а балансирного - через перо руля. У балансирного руля точка приложения сил давления находится ближе к оси вращения, поэтому для его перекладки нужна меньшая мощность, что является существенным преимуществом.
Перо руля на судах старой постройки выполняли из толстого стального листа, подкрепленного коваными ребрами. Такие плоские рули при движении судна создавали значительное сопротивление и сейчас применяются редко (на мощных ледоколах) .
Рис. 73. Типы рулей: а - небалансирный; б - балансирный
Современные суда в основном имеют пустотелые (обтекаемые) рули (рис. 74), перо которых состоит из рамы, с двух сторон обшитой лист>-вой сталью. Такая конструкция уменьшает сопротивление воды движению судна. Для еще большего уменьшения сопротивления потоку воды к перу руля на уровне гребного вала добавляется иногда обтекатель в виде грушевидной наделки.
Рама пустотелого руля состоит из горизонтальных ребер и вертикальных диафрагм. Сверху и снизу перо руля закрыто торцовыми листами. Внутреннее пространство для обеспечения водонепроницаемости и защиты от коррозии заполняют смолистым веществом или самовспенивающимся пенополиуретаном.
В верхней части перо руля на фланцах или с помощью конуса соединено с баллером. При фланцевом соединении на нижнем конце баллера и в верхней части пера руля имеются горизонтальные фланцы, скрепленные болтами. Иногда баллер внизу конусный и вставлен в такое же отверстие верхней части пера руля. Так как фланец обычно несколько смещен относительно оси вращения, то образуется плечо, облегчающее поворот руля.
Верхний конец баллера выведен на одну из палуб, на которой расположен рулевой привод. Чтобы вода не проникала в корпус судна через вырез для пропуска баллера, последний помещают в гельмпортовую трубу, соединение которой с наружной обшивкой и настилом палубы водонепроницаемо. В верхней части трубы устанавливают сальник, предотвращающий попадание воды в корпус судна. Выше сальника ставят подшипник, который является верхней опорой баллера руля. В зависимости от способа крепления к корпусу судна рули бывают навесные, подвесные, полуподвесные и со съемным рудерпостом.
![]()
Рис. 74. Перо пустотелого руля: 1- баллер; 2- фланеи; 3- торцовый лист; 4-грушевидная наделка-обтекатель; 5- вертикальные диафрагмы; б - горизонтальные ребра; 7-обшивка
![]()
Рис. 75. Рули; а-навесной; б - подвесной; в - полуподвесной, г - со съемным рудерпостом; /-гельмпортовая труба; 2- баллер; 3- фланец; 4- рулевая петля, 5- съемный кожух; 6- рудерпост; 7- подпятник; 8- перо руля; 9- гайка; 10- шайба; 11- рулевой штырь; 12- бронзовая облицовка; 13- бакаут; 14- бронзовая втулка; 15- упорный стакан; 16- упорно-опорный подшипник; 17- гельмпортовая труба; 18- упор; 19- подшипник; 20- корпус; 21- сальник; 22- упорно-опорный подшипник; 23- обтекатель; 24- конус баллера; 25- конусное гнездо пера руля; 26- фланец рудерпоста; 27-съемный рудерпост; 28- вертикальная труба
Навесной руль (рис. 75, а) навешивают на рудерпост при помощи рулевых штырей. Нижняя часть штыря имеет цилиндрическую форму, а верхняя - коническую с небольшим уклоном. Часть штыря, расположенная выше конуса, имеет резьбу. Штырь конической частью вводят в отверстие рулевой петли и затягивают гайкой, что обеспечивает его плотную посадку. В петли рудерпоста штыри ставят с небольшим зазором, поэтому они могут свободно вращаться. Для уменьшения трения цилиндрическая часть штыря имеет бронзовую облицовку, а петля рудерпоста - втулку из бакаута или текстолита. В подпятник для уменьшения трения под штырь ставят упорный стакан, который воспринимает вертикальную нагрузку.
Обтекаемый навесной руль обычно навешивают на рудерпост на двух штырях, что дает возможность почти вплотную приблизить перо руля к рудерпосту и уменьшить вихреобразование в зазоре между рудерпостом и рулем. Рудерпост в этом случае имеет обтекаемую форму, что дополнительно уменьшает сопротивление воды. На ледоколах руль навешивают на 3-4 штыря, что повышает надежность крепления.
Перо подвесного руля (рис. 75, б) не имеет опор и поддерживается только баллером, который опирается на опорные и упорные подшипники, установленные внутри корпуса.
Перо полуподвесного руля (рис. 75, в) имеет только один штырь в нижней части пера руля. В верхней части перо руля поддерживается баллером. Вертикальная нагрузка у полуподвесного руля может передаваться как на штырь, так и на баллер. В первом случае штырь в подпятнике Д9лжен опираться на упорный стакан, а во втором баллер снабжают упорным подшипником.
В последнее время все более широкое распространение получают рули со съемным рудерпостом (рис. 75, г). Перо такого руля имеет открытую
Вертикальную трубу, через которую проходит съемный рудерпост. Нижним концом рудерпост закрепляют конусом в подпятнике, а верхним фланцем крепят к ахтерштевню. Так как рудерпост в этом случае является осью, на которой вращается руль, то внутри трубы устанавливают подшипники, а рудерпост в этих местах имеет бронзовую облицовку.
Назначение : обеспечение управляемости судна, т.е. его способности двигаться по определённой траектории.
Конструкция рулевого устройства .
Общее расположение одного из вариантов рулевого устройства представлено на рисунке.
Рис. 3.1.1. Схема рулевого устройства:
1- перо руля; 2 – фланцевое соединение; 3- опоры баллера;
4 – голова баллера; 5 – рулевой привод; 6 – рулевая машина;
7- штурвал; 8 – рулевая передача; 9 – баллер; 10 – гельмпортовая труба;
11 – петля пера руля; 12 – штырь; 13 – петля рудерпоста;
14 – рудерпост; 15 – пятка ахтерштевня.
Основным элементом, создающим необходимое для маневра усилие, является перо руля 1. Для поворота пера руля на некоторый угол относительно ДП служит баллер 9 – вал переменного по длине диаметра. Участки с увеличенным по сравнению с расчётным диаметром предусматриваются в местах расположения опор баллера 3 для повышения ремонтопригодности. Для соединения баллера и пера руля чаще всего используют либо фланцевое соединение 2, изображённое на рисунке, либо конусное соединение. Баллер руля входит в кормовой подзор корпуса судна через гельмпортовую трубу 10, обеспечивающую непроницаемость корпуса, и имеет не менее двух опор 3 по высоте. Нижняя опора располагается над гельмпортовой трубой и имеет сальниковое уплотнение, препятствующее попаданию воды в корпус судна. Верхняя опора располагается непосредственно у головы баллера, обычно она воспринимает массу баллера и руля, поэтому на баллере делают кольцевой выступ.
Необходимое для поворота руля усилие на баллере создаётся посредством рулевого привода . В состав рулевого привода входят: рулевая машина 6; средства передачи крутящего момента от рулевой машины голове баллера 4 (рулевой привод - румпель или сектор 5); рулевая передача 8; а так же система дистанционного управления рулевым приводом – устройство для передачи команд по перекладке руля с ходового мостика (от штурвала 7) на органы управления рулевой машины.
Классификация рулей .
По распределению площади пера руля относительно оси вращения выделяют следующие типы рулей (рисунок 3.1.2):

Рис. 3.1.2. Классификация рулей по распределению площади:
1 – перо руля; 2 – противоледовый выступ; 3 – баллер;
4 – рудерпост; 5- кронштейн.
- небалансирный (обычный ) (рис. 3.1.2, а), ось вращения которого близка к передней (носовой) кромке пера руля (отстоит от неё на расстояние, равное радиусу опоры руля);
- балансирный (рис. 3.1.2, б), ось вращения которого смещена ближе к центру гидродинамического давления (отстоит от передней кромки на расстояние, большее радиуса опоры руля), при этом часть площади пера, находящаяся в нос от оси вращения, называется балансирной;
- полубалансирный (рис. 3.1.2, в), у которого распределение площади в нижней части пера руля соответствует балансирному, а в верхней – обычному рулю;
- подвесной (рис. 3.1.2, г), выделяется в классификации традиционно и является тем же балансирным рулём, отличающимся тем, что непосредственно на пере руля опоры не размещаются.
Балансирные и полубалансирные рули характеризуются коэффициентом балансирности k d:
где: F d - часть площади пера руля, находящаяся между передней кромкой и осью вращения (балансирная), м 2 ; F – полная площадь пера руля, м 2 .
Для балансирных рулей обычно k d = 0,21¸0,23, для полубалансирных k d = 0,15.
Достоинство балансирных и полубалансирных рулей: вследствие меньшего отстояния центра давления от оси вращения момент на баллере требуется меньше, чем у небалансирных.
Недостаток – крепление таких рулей к судну сложнее и менее надёжно.
По форме профиля выделяют следующие типы рулей:
- плоские однослойные, из-за своей низкой эффективности применяются редко – в основном на несамоходных судах;
- профилированные двухслойные (обтекаемые ), состоящие из наружной обшивки и внутреннего набора. Набор формируется из горизонтальных рёбёр и вертикальных диафрагм, сваренных друг с другом. Гоизонтальные рёбра крепятся к основе пера руля – рудерпису, представляющему собой массивный вертикальный стержень. Рудерпис изготавливается вместе с петлями для навешивания пера руля на рудерпост. Конкретную форму профиля руля как правило подбирают экспериментально, соответственно, именуют профили по названию лабораторий, в которых они разработаны.
Рулевые приводы, их виды, конструкция и требования к ним .
Рулевой привод предназначен для непосредственного выполнения перекладки руля и контроля его положения.
В составе рулевого привода можно выделить (достаточно условно) следующие элементы:
Устройство для передачи крутящего момента от рулевой машины к баллеру (иногда называемое собственно рулевым приводом);
Рулевая машина – силовая установка, создающая необходимое усилие для поворота баллера;
Рулевая передача, осуществляющая связь между постом управления и рулевой машиной;
Система контроля.
Выделяют следующие основные виды рулевых приводов:
Механические (ручные), к которым относятся румпельно-штуртросовые, секторно-штуртросовые, секторные с валиковой проводкой, винтовые румпельные;
Имеющие источник энергии (гидравлические, электрические, электрогидравлические).
Механические приводы применяются только на малых судах и в качестве вспомогательных рулевых приводов.
Требования к рулевым приводам содержатся в Правилах классификации и постройки морских судов РМРС (том 1, раздел III «Устройства, оборудование и снабжение», п. 2 «Рулевое устройство» и том 2, раздел IX «Механизмы», п.6.2 «Рулевые приводы»). Среди основных требований можно выделить следующие:
1. Все суда должны быть снабжены главным и вспомогательным рулевыми приводами, действующими независимо один от другого.
2. Главный привод и баллер должны обеспечивать перекладку руля с 35 0 одного борта на 30 0 другого борта не более чем за 28 с при максимальной эксплуатационной осадке и скорости переднего хода.
3. Вспомогательный привод должен обеспечивать перекладку руля с 15 0 одного борта на 15 0 другого борта не более чем за 60 с при максимальной эксплуатационной осадке и скорости хода, равной половине максимальной эксплуатационной скорости переднего хода или 7 уз (в зависимости от того что больше).
4. На нефтеналивных судах, газовозах и химовозах валовой вместимостью 10000 и более, на прочих судах вместимостью 70000 и более, а также на всех атомных судах главный рулевой привод должен включать в себя два (или более) одинаковых силовых агрегата. Соответственно, для них должны быть предусмотрены две независимых системы управления с ходового мостика.
5. Управление главным приводом должно быть предусмотрено с ходового мостика и из румпельного отделения.
6. Управление вспомогательным приводом должно быть предусмотрено из румпельного отделения, а в том случае если он действует от источника энергии – должно быть предусмотрено также независимое управление с ходового мостика.
7. Конструкция рулевых приводов должна обеспечивать переход при аварии с главного привода на вспомогательный за время не более 2 мин.
8. Должен быть обеспечен контроль положения руля.
Выделяют следующие типы рулевых приводов:
Продольно-румпельный, в котором одноплечий румпель, насаженный на головку баллера, расположен в продольном направлении (рис. 3.1.3, а);
Поперечно-румпельный, в котором румпель представляет собой двуплечий рычаг (рис. 3.1.3, б) – название при этом условно, т.к. румпель может находиться как вдоль, так и поперёк ДП судна;
Секторный, в котором насаженный на головку баллера сектор поворачивается ведущей шестернёй рулевой машины (рис. 3.1.3, в).
а)
 б)
б)
 в)
в)

Рис. 3.1.3 Типы рулевых приводов:
а – продольно-румпельный; б – поперечно-румпельный; в секторный.
В настоящее время на крупных судах получил распространение поперечно-румпельный привод с совмещённой с ним четырёхплунжерной гидравлической рулевой машиной.
Выделяют следующие типы рулевых передач:
Валиковая, при которой связь между постом управления и исполнительным механизмом (например, золотником гидравлической рулевой машины) осуществляется посредством системы стальных валиков (отрезков труб), соединённых между собой с помощью шарниров или конических зубчатых передач;
Гидравлическая, в которой используется объёмный гидропривод;
Электрическая, состоящая из системы самосинхронизирующихся двигателей – при вращении штурвала в роторе передающего двигателя (генератора) возбуждается ток, вызывающей вращение ротора приёмника, соединённого с исполнительным механизмом рулевой машины.
Из различных типов рулевых машин наибольшее распространение получили электрические и электрогидравлические рулевые машины.
Наиболее распространёнными на современных судах являются электрогидравлические четырёхплунжерные рулевые машины с поперечно-румпельным рулевым приводом. Конструкция такой ЭГРМ с механической обратной связью приведена на рисунке 3.1.4.
![]()

Рис. 3.1.4 Электрогидравлическая рулевая машина (ЭГРМ)
Два идентичных исполнительных механизма ИМ (приводимых в действие электродвигателями 11 от двух электрических линий управления) работают на один выходной управляющий элемент – шток 12. Перемещение штока h (являющееся заданием на перекладку руля) с помощью рычагов BD и FG, соединённых в точке С, и штанги 17 передаётся насосам регулируемой подачи 8, приводимых в действие электродвигателями 7. Насосы согласно полученным перемещениям е 1 и е 2 регулируемых органов создают подачу Q 1 и Q 2 соответственно.
При работе насосов в цилиндрах рулевой машины 6 создаётся перепад давлений р 1 – р 2 , в результате чего баллер 3 посредством плунжеров 5 и румпеля 2 поворачивается, и руль 1 перекладывается на некоторый угол a.
При этом обратная механическая связь 4 возвращает посредством рычагов DB и FG штангу 17 в исходное среднее положение, в котором суммарное перемещение регулируемых органов насосов е = 0. Давления в полостях цилиндров выравниваются, перемещение руля останавливается и поддерживается заданный угол a. Таким образом, данная ЭГРМ с механической обратной связью представляет собой автономную следящую систему, включённую последовательно замкнутому контуру электрической системы управления.
Указатели положения руля на мостике получают электрический сигнал от датчика 14, приводимого в действие рычагом 13, соединённым со штоком 12.
Для согласования нулевых положений штанги и управляемых органов насосов служит регулировочное устройство, состоящее из винтовых соединений 15 и 16 на концах штанги NL. Серьги AB и HG компенсируют взаимное перемещение рычагов.
В случае отказа дистанционной системы управления рулевая машина приводится в действие штурвалом 10, соединённым с редуктором 9.