Диагностика и ремонт: CAN - шина
21.02.2006
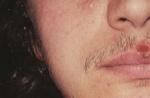
Именно так выглядит (в основном) та самая "шина CAN", с которой в последнее время нам придется сталкиваться все чаще и чаще:
фото 1
Это обыкновенный двухпроводной кабель получивший название Twisted Pair.
На приведенном фото 1 показаны провода CAN High и CAN Low силового агрегата.
По этим проводам производится обмен данными между блоками управления, они могут нести информацию о скорости автомобиля, скорости вращения коленчатого вала, угле опережения зажигания и так далее.
Обратите внимание, что один из проводов дополнительно помечен черной полоской. Именно таким образом отмечается и визуально определяется провод
CAN High (оранжево-черный).
Цвет провода
CAN-Low - оранжево-коричневый.
За основной цвет шины
CAN принят оранжевый цвет.
На рисунках и чертежах принято изображать цвета проводов шины CAN другими цветами, а именно:

фото 2
CAN-High - желтым цветом
CAN-Low - зеленым цветом
Всего существует несколько разновидностей шин
CAN, определяемых выполняемыми ими функциями:
Шина CAN силового агрегата
(быстрый канал
).
Она позволяет
передавать информацию со скоростью)500 кбит/с и
служит для связи между блоками управления (двигатель - трансмиссия)
Шина CAN системы "Комфорт"
(медленный канал
).
Она позволяет
передавать информацию со скоростью100 кбит/с и
служит для связи между блоками управления, входящими в систему "Комфорт".
Шина данных CAN информационно-
командной системы
(медленный канал
), позволяющая передавать данные со скоростью 100 kBit/s. Обеспечивает связь
между различными обслуживающимисистемами ( например,телефонной и навигационной системами)
.
Новые модели автомобилей все более становятся похожими на самолеты - по количеству заявленных функций для безопасности, комфорта и экологичности. Блоков управления становится все больше и больше и "тянуть" от каждого грозди проводов - нереально.
Поэтому кроме шины
CAN уже существуют другие шины, получившие названия:
– шина LIN (однопроводная шина)
– шина MOST (оптоволоконная шина)
– беспроводная шина Bluetooth
Но не будем "расплываться мыслью по древу", заострим наше внимание пока что на одной конкретной шине: CAN (по взглядам корпорации BOSCH).
На примере шины CAN силового агрегата можно посмотреть форму сигнала:

Фото 3
Когда на
High шине
CAN доминантное состояние, то напряжение проводе повышается до 3.5 вольт.
В рецессивном состоянии напряжение на обоих проводах равняется 2.5 вольта.
Когда на проводе
Low доминантное состояние, то напряжение падает до 1.5 вольта.
("Доминанта" - явление, доминирующее, главенствующее или господствующее в какой-либо сфере,- из словарей).
Для повышения надежности передачи данных, в шине
CAN применяется дифференциальный способ передачи сигналов по двум проводам, имеющим название
Twisted Pair. А провода, которые образуют эту пару, называются
CAN High и
CAN Low.
В исходном состоянии шины на обоих проводах поддерживается постоянное напряжение на определенном (базовом) уровне. Для шины
CAN силового агрегата оно приблизительно равняется 2.5 вольта.
Такое исходное состояние называется "состоянием покоя" или "рецессивом".
Каким образом передаются и преобразуются сигналы по
CAN шине?
Каждый из блоков управления подсоединен к CAN шине посредством отдельного устройства под названием трансивер, в котором имеется приемник сигналов, представляющий собой дифференциальный усилитель, установленный на входе сигналов:

фото 4
Поступающие по проводам
High и
Low сигналы, поступают в дифференциальный усилитель, обрабатываются и поступают на вход блока управления.
Эти сигналы представляют собою напряжение на выходе дифференциального усилителя.
Дифференциальный усилитель формирует это выходное напряжение как разность между напряжениями на проводах High и Low шины CAN.
Таким образом исключается влияние величины базового напряжения (у шины CAN силового агрегата оно равно 2,5 В) или какого либо напряжения, вызванного, например, внешними помехами.
Кстати, насчет помех. Как говорят, "шина
CAN довольно устойчива к помехам, поэтому она нашла такое широкое применение".
Попробуем разобраться с этим.
Провода шины
CAN силового агрегата расположены в моторном отсеке и на них могут воздействовать помехи различного порядка, например, помехи от системы зажигания.
Так как шина CAN состоит из двух проводов, которые перекручены между собой, то помеха одновременно воздействует на два провода:

Из вышеприведенного рисунка видно, что происходит далее: в дифференциальном усилителе напряжение на проводе Low (1,5 В – "
Pp") вычитается из напряжения
на проводе High (3,5 В – "
Pp") и в обработанном сигнале помеха отсутствует ("
Pp" - помеха).

Примечание: По наличию времени статья может иметь продолжение - много еще остается "за кадром".
Кучер В.П.
© Легион-Автодата
Вас также может заинтересовать:
В данной статье не будем полностью расписывать CAN протокол, а обратим внимание лишь на вещи, которые надо обязательно знать и понимать для использования или разработки электронных устройств с поддержкой CAN.
Протокол CAN был разработан для автомобильной промышленности и впоследствии стал стандартом в области создания бортовых сетей автомобилей, железнодорожного транспорта и т.д. CAN позволяет создавать сети с развитыми средствами контроля ошибок, скоростью передачи до 1Мбит/с и пакетами содержащими не более восьми байтов данных.
Канальный и физический уровни CAN
В протоколе CAN нет строгого определения физического уровня, поэтому для передачи сообщений может использоваться, например, витая пара или оптоволокно. По сути дела CAN реализует канальный уровень, т.е. осуществляет формирование пакетов сообщений, ограничение распространения ошибок, подтверждение приема и арбитража. Есть конечно и распространенные стандарты прикладного уровня например CANopen, но если нет необходимости обеспечивать взаимодействие между оборудованием различных производителей, то лучше использовать внутренний протокол.
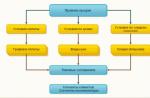
Структура узла сети CAN
Рассматриваемый нами узел сети CAN состоит из микроконтроллера, CAN контроллера и приемопередатчика (рисунок 1). Чаще всего мы используем микроконтроллеры с встроенным CAN контроллером для упрощения схемы, но иногда используется автономный контроллер CAN с интерфейсом SPI (MCP2510). Далее приемопередатчик подключается к витой паре, на концах которой размещены согласующие резисторы (терминатор) с сопротивлением 120 Ом.
Рисунок 1 – Узел сети CAN
Для формирования логической единицы в витой паре, или свободной шине, на оба провода подается напряжение, равное половине разности напряжения между 0 или Vcc. Логическому нулю соответствует подача на провода линии дифференциального напряжения (рисунок 2).

Рисунок 2 – Логические уровни на CAN-шине
Шина CAN позволяет передавать данные со скоростью 1 Мбит/c при длине кабеля не более 40 м. В обучающей литературе написано, что при снижении скорости передачи до 10кбит/с можно добиться длины сети в 1.5км.
Пакет сообщения CAN
Формат сообщения CAN показан на рисунке 3.

Рисунок 3 – Пакет сообщения CAN
По факту пакет сообщения формируется CAN контроллером, а прикладное ПО только устанавливает идентификатор сообщения, длину сообщения и предоставляет байты данных, поэтому полностью рассматривать пакет не будем, а посмотрим на данные которые мы изменяем при работе с CAN шиной.
Идентификатор сообщения используется для идентификации данных, отправленных в этом пакете. Каждое отправленное сообщение принимается всеми узлами сети и в данном случае идентификатор позволяет понять конкретному устройству, необходимо ли обрабатывать данное сообщение. Максимальная длина сообщения 8 байт, но можно уменьшить это значение для сохранения пропускной способности шины CAN. Для примера ниже по тексту есть несколько скриншотов CAN сообщений из автомобильной сети.
Арбитраж на шине CAN
Если без подробностей, то первым по шине CAN всегда передается сообщение с наименьшим идентификатором.
Настройка скорости передачи данных по шине CAN
Скорость передачи данных по CAN шине настраивается за счет формирования квантов времени, а не как во многих других протоколах последовательной передачи данных за счет делителя скорости. В большинстве случаев используются скорости 10Кбит/c, 20Кбит/c, 50Кбит/c, 100Кбит/c, 125Кбит/c, 500Кбит/c, 800Кбит/c, 1MBaud и настройки для этих скоростей уже посчитаны. На рисунке 4 изображено окно выбора скорости в программе PcanView.

Рисунок 4 – Выбор скорости передачи данных в программе PcanView
Как мы видим при установке стандартной скорости настройки проставляются автоматически, но бывают случаи когда необходимо использовать другую скорость передачи данных. Например бортовой CAN автомобиля может работать со скоростью 83Кбит/c. В этом случае придется провести расчет настроек самостоятельно или поискать специализированный калькулятор скорости в интернете. Для самостоятельного расчета скорости необходимо понимать, что для передачи одного бита сообщения используется несколько квантов, а интервал передачи состоит из трех сегментов (рисунок 5).

Рисунок 5 – Время передачи одного бита
Первый сегмент всегда фиксирован и равняется одному кванту. Далее идет два сегмента Tseg1 и Tseg2 и количество квантов в каждом сегменте определяется пользователем и может быть равно от 8 до 25. Точка выборки находится между Tseg1 и Tseg2, т.е. в конце первого и в начале второго сегмента. Так же пользователь может определить ширину скачка синхронизации (Synchronization Jump Width - SJW) для подстройки битовой скорости принимающего устройства, который может быть в диапазоне 1 – 4 квантов времени.
Теперь приведем формулу расчета скорости (Пример расчета скорости для CAN контроллера SJA1000):
BTR = Pclk/(BRP * (1 + Tseg1 + Tseg2))
BTR – скорость передачи данных,
Pclk – частота работы CAN контроллера,
BRP – значение предделителя частоты генератора скорости передачи
Tseg1 – первый сегмент
Tseg2 – Второй сегмент
Для проверки возьмем уже посчитанную скорость 125Кбит/c и попробуем получить настройки вручную. Pclk возьмем 16 МГц.
BRP = 16МГц /(125K * (1 + Tseg1 + Tseg2))
Затем подбираем интервал передачи бита находящийся в диапазоне от 8 до 25 квантов времени, так что бы получилось целое значение BRP. В нашем случае если взять (1 + Tseg1 + Tseg2) = 16, то BRP будет равен 30.
SP = ((1 + Tseg1 + Tseg2) * 70)/100
Подставляем значения и получаем 16 * 0.7 = 11.2, что соответствует соотношению Tseg1 = 10, Tseg2 = 5, т.е. 1 + 10 + 5 = 16. Далее смотрим если Tseg2 >= 5, то SJW = 4, если Tseg2 < 5, то SJW = (Tseg2 – 1). В нашем случае SJW = 4.
Итого для получения скорости 125Кбит/c необходимо в параметрах указать, BRP = 30, Tseg1 = 10, Tseg2 = 5, SJW = 4.
P.S. Конфигурирование baud rate значительно отличается между старыми модулями USB-CANmodul (GW-001 и GW-002) с контроллером SJA1000 и новыми модулями sysWORXX с контроллером AT91SAM7A3. В статье описывающей работу с бортовым CAN автомобиля на скорости 83кбит/c приведен расчет скорости для контроллера AT91SAM7A3.
Пример получения и передачи данных по CAN-интерфейсу
В примере будем использовать CAN-адаптер с программой PcanView от SYSTEC и подключимся к салонному CAN автомобиля, работающему со скоростью 125Кбит/с. Рассматриваемый нами автомобиль оснащен креслами с электроприводом и поэтому исследуем данные отвечающие за положение кресел и постараемся изменить положение спинки подменив пакет с помощью компьютера.
Для начала на схеме автомобиля находим наиболее удобно расположенный разъем с линиями CANH и CANL и подключаем к нему наш адаптер. Если разъем и провода найти не получилось, то можно подлезть к блоку управления кресла, найти там два скрученных между собой провода и аккуратно надрезав провода подключить адаптер. Если после подключения и настройки адаптера сообщения не приходят, то в первую очередь попробуйте поменять между собой CANH CANL и проверить включено ли зажигание.
Далее запускаем программу PcanView, в открывшемся окне настроек устанавливаем Baudrate = 125Кбит/c и нажимаем ОК (рисунок 4). В следующем окне устанавливаем Message filter = Standard, диапазон адресов от 000 до 7FF и нажимаем ОК (рисунок 6).

Рисунок 6 – Настройка CAN фильтра
Если все сделано правильно, то мы увидим сообщения от кресел (рисунок 7), а при нажатии кнопки наклона спинки на пульте управления мы увидим еще одно сообщение с адресом 1F4 идущее от пульта к креслу (рисунок 8).
Рисунок 7 – CAN сообщения от кресла с электроприводом

Рисунок 8 – CAN сообщения от кресла с электроприводом и сообщение от пульта управления к креслу
Теперь мы знаем какие должны быть адрес, длина и данные в CAN пакете для имитации нажатия кнопки изменения положения спинки. Во вкладке Transmit нажимаем NEW и в открывшемся окне создаем копию пакета 1F4, т.е. ID = 1F4, Length = 3, Data = 40 80 00. Period можно оставить 0 ms, тогда сообщения будут отправляться по факту нажатия кнопки пробел (рисунок 9).
Рисунок 9 – Создание CAN сообщения
На рисунке 10 отображено поле Transmit главного окна содержащее все отправляемые сообщения в CAN и информацию о них. При выделении сообщения и нажатии кнопки пробел произойдет отправка пакета в CAN сеть и кресло немного сдвинется в нужном направлении.
Понятное дело, что добиться полноценного управления креслом в таком случае не получиться, т.к. мы не можем исключить из сети пакеты заводского пульта управления, но эта проблема вполне решаема.
Итог
Мы увидели как при определенных усилиях и навыках можно создавать собственные электронные системы с использованием высокотехнологичного протокола CAN и как можно подключаться, исследовать и управлять устройствами подключенными к автомобильной CAN шине.
Шина CAN – ВведениеПротокол CAN является стандартом ISO (ISO 11898) в области последовательной передачи данных. Протокол был разработан с прицелом на использование в транспортных приложениях. Сегодня CAN получил широкое распространение и используется в системах автоматизации промышленного производства, а также на транспорте.
Стандарт CAN состоит из физического уровня и уровня передачи данных, определяющего несколько различных типов сообщений, правила разрешения конфликтов при доступе к шине и защиту от сбоев.
Протокол CAN
Протокол CAN описан в стандарте ISO 11898–1 и может быть кратко охарактеризован следующим образом:
Физический уровень использует дифференциальную передачу данных по витой паре;
Для управления доступом к шине используется неразрушающее bit–wise разрешение конфликтов;
Сообщения имеют малые размеры (по большей части 8 байт данных) и защищены контрольной суммой;
В сообщениях отсутствуют явные адреса, вместо этого каждое сообщение содержит числовое значение, которое управляет его очередностью на шине, а также может служить идентификатором содержимого сообщения;
Продуманная схема обработки ошибок, обеспечивающая повторную передачу сообщений, если они не были получены должным образом;
имеются эффективные средства для изоляции сбоев и удаления сбойных узлов с шины.
Протоколы более высоких уровней
Сам по себе протокол CAN определяет всего лишь, как малые пакеты данных можно безопасно переместить из точки A в точку B посредством коммуникационной среды. Он, как и следовало ожидать, ничего не говорит о том, как управлять потоком; передавать большое количество данных, нежели помещается в 8–байтное сообщение; ни об адресах узлов; установлении соединения и т.п. Эти пункты определяются протоколом более высокого уровня (Higher Layer Protocol, HLP). Термин HLP происходит из модели OSI и её семи уровней.
Протоколы более высокого уровня используются для:
Стандартизации процедуры запуска, включая выбор скорости передачи данных;
Распределения адресов среди взаимодействующих узлов или типов сообщений;
Определения разметки сообщений;
обеспечения порядка обработки ошибок на уровне системы.
Пользовательские группы и т.п.
Одним из наиболее эффективных способов повышения вашей компетентности в области CAN является участие в работе, осуществляемой в рамках существующих пользовательских групп. Даже если вы не планируете активно участвовать в работе, пользовательские группы могут являться хорошим источником информации. Посещение конференций является ещё одним хорошим способом получения исчерпывающей и точной информации.
Продукты CAN
На низком уровне принципиально различают два типа продуктов CAN, доступных на открытом рынке – микросхемы CAN и инструменты разработки CAN. На более высоком уровне – другие два типа продуктов: модули CAN и инструменты проектирования CAN. Широкий спектр данных продуктов доступен на открытом рынке в настоящее время.
Патенты в области CAN
Патенты, относящиеся к приложениям CAN, могут быть различных типов: реализация синхронизации и частот, передача больших наборов данных (в протоколе CAN используются кадры данных длиной всего лишь 8 байт) и т.п.
Системы распределённого управления
Протокол CAN является хорошей основой для разработки систем распределённого управления. Метод разрешения конфликтов, используемый CAN, обеспечивает то, что каждый узел CAN будет взаимодействовать с теми сообщениями, которые относятся к данному узлу.
Систему распределённого управления можно описать как систему, вычислительная мощность которой распределена между всеми узлами системы. Противоположный вариант – система с центральным процессором и локальными точками ввода–вывода.
Сообщения CAN
Шина CAN относится к широковещательным шинам. Это означает, что все узлы могут «слушать» все передачи. Не существует возможности послать сообщение конкретному узлу, все без исключения узлы будут принимать все сообщения. Оборудование CAN, однако, обеспечивает возможность локальной фильтрации, так что каждый модуль может реагировать только на интересующее его сообщение.
Адресация сообщений CAN
CAN использует относительно короткие сообщения – максимальная длина информационного поля составляет 94 бита. В сообщениях отсутствует явный адрес, их можно назвать контентно–адрессованными: содержимое сообщения имплицитно (неявным образом) определяет адресата.
Типы сообщений
Существует 4 типа сообщений (или кадров), передающихся по шине CAN:
Кадр данных (Data Frame);
Удаленный кадр (Remote Frame);
Кадр ошибки (Error Frame);
Кадр перегрузки (Overload Frame).
Кадр данных
Кратко: «Всем привет, есть данные с маркировкой X, надеюсь вам понравятся!»
Кадр данных – самый распространенный тип сообщения. Он содержит в себе следующие основные части (некоторые детали не рассматриваются для краткости):
Поле арбитража (Arbitration Field), которое определяет очередность сообщения в том случае, когда за шину борятся два или более узла. Поле арбитража содержит:
В случае CAN 2.0A, 11–битный идентификатор и один бит, бит RTR который является определяющим для кадров данных.
В случае CAN 2.0B, 29–битный идентификатор (который также содержит два рецессивных бита: SRR и IDE) и бит RTR.
Поле данных (Data Field), которое содержит от 0 до 8 байт данных.
Поле CRC (CRC Field), содержащее 15–битную контрольную сумму, посчитанную для большинства частей сообщения. Эта контрольная сумма используется для обнаружения ошибок.
Слот распознавания (Acknowledgement Slot). Каждый контроллер CAN, способный корректно получить сообщение, посылает бит распознавания (Acknowledgement bit) в конце каждого сообщения. Приемопередатчик проверяет наличие бита распознавания и, если таковой не обнаруживается, высылает сообщение повторно.
Примечание 1: Присутствие на шине бита распознавания не значит ничего, кроме того, что каждый запланированный адресат получил сообщение. Единственное, что становится известно, это факт корректного получения сообщения одним или несколькими узлами шины.
Примечание 2: Идентификатор в поле арбитража, несмотря на свое название, необязательно идентифицирует содержимое сообщения.
Кадр данных CAN 2.0B («cтандартный CAN»).

Кадр данных CAN 2.0B («расширенный CAN»).
Удаленный кадр
Кратко: «Всем привет, кто–нибудь может произвести данные с маркировкой X?»
Удаленный кадр очень похож на кадр данных, но с двумя важными отличиями:
Он явно помечен как удаленный кадр (бит RTR в поле арбитража является рецессивным), и
Отсутствует поле данных.
Основной задачей удаленного кадра является запрос на передачу надлежащего кадра данных. Если, скажем, узел A пересылает удаленный кадр с параметром поля арбитража равным 234, то узел B, если он должным образом инициализирован, должен выслать в ответ кадр данных с параметром поля арбитража также равным 234.
Удаленные кадры можно использовать для реализации управления трафиком шины типа «запрос–ответ». На практике, однако, удаленный кадр используется мало. Это не так важно, поскольку стандарт CAN не предписывает действовать именно так, как здесь обозначено. Большинство контроллеров CAN можно запрограммировать так, что они будут автоматически отвечать на удаленный кадр, или же вместо этого извещать локальный процессор.
Есть одна уловка, связанная с удаленным кадром: код длины данных (Data Length Code) должен быть установлен длине ожидаемого ответного сообщения. В противном случае разрешение конфликтов работать не будет.
Иногда требуется чтобы узел, отвечающий на удаленный кадр, начинал свою передачу как только распознавал идентификатор, таким образом «заполняя» пустой удаленный кадр. Это другой случай.

Кадр ошибки (Error Frame)
Кратко (все вместе, громко): «О, ДОРОГОЙ, ДАВАЙ ПОПРОБУЕМ ЕЩЁ РАЗОК»
Кадр ошибки (Error Frame) – это специальное сообщение, нарушающее правила формирования кадров сообщения CAN. Он посылается, когда узел обнаруживает сбой и помогает остальным узлам обнаружить сбой – и они тоже будут отправлять кадры ошибок. Передатчик автоматически попробует послать сообщение повторно. Наличествует продуманная схема счетчиков ошибок, гарантирующая, что узел не сможет нарушить передачу данных по шине путём повторяющейся отсылки кадров ошибки.
Кадр ошибки содержит флаг ошибки (Error Flag), который состоит из 6 бит одинакового значения (таким образом нарушая правило вставки битов) и разграничителя ошибки (Error Delimiter), состоящего из 8 рецессивных бит. Разраничитель ошибки предоставляет некоторое пространство, в котором другие узлы шины могут отправлять свои флаги ошибки после того, как сами обнаружат первый флаг ошибки.

Кадр перегрузки (Overload Frame)
Кратко: «Я очень занятой 82526 маленький, не могли бы вы подождать минуточку?»
Кадр перегрузки упоминается здесь лишь для полноты картины. По формату он очень похож на кадр ошибки и передается занятым узлом. Кадр перегрузки используется нечасто, т.к. современные контроллеры CAN достаточно производительны, чтобы его не использовать. Фактически, единственный контроллер, который будет генерировать кадры перегрузки – это ныне устаревший 82526.
Стандартный и расширенный CAN
Изначально стандарт CAN установил длину идентификатора в поле арбитража равной 11 битам. Позже, по требованию покупателей стандарт был расширен. Новый формат часто называют расширенным CAN (Extended CAN), он позволяет использовать не менее 29 бит в идентификаторе. Для различения двух типов кадров используется зарезервированный бит в поле управления Control Field.
Формально стандарты именуются следующим образом –
2.0A – только с 11–битными идентификаторами;
2.0B – расширенная версия с 29–битными или 11–битными идентификаторами (их можно смешивать). Узел 2.0B может быть
2.0B active (активным), т.е. способным передавать и получать расширенные кадры, или
2.0B passive (пассивным), т.е. он будет молча сбрасывать полученные расширенные кадры (но, смотрите ниже).
1.x – относится к оргинальной спецификации и её ревизиям.
В настоящее время новые контроллеры CAN обычно относятся к типу 2.0B. Контроллер типа 1.x или 2.0A прибудет в замешательство, получив сообщения с 29 битами арбитража. Контроллер 2.0B пассивного типа примет их, опознает, если они верны и, затем – сбросит; a контроллер 2.0B активного типа сможет и передавать, и получать такие сообщения.
Контроллеры 2.0B и 2.0A (равно, как и 1.x) совместимы. Можно использовать их все на одной шине до тех пор, пока контроллеры 2.0B будут воздерживаться от рассылки расширенных кадров.
Иногда люди заявляют, что стандартный CAN «лучше» расширенного CAN, потому что в сообщениях расширенного CAN больше служебных данных. Это необязательно так. Если вы используете поле арбитража для передачи данных, то кадр расширенного CAN может содержать меньше служебных данных, чем кадр стандартного CAN.
Основной CAN (Basic CAN) и полный CAN (Full CAN)
Термины Basic CAN и Full CAN берут начало в «детстве» CAN. Когда–то существовал CAN–контроллер Intel 82526, предоставлявший программисту интерфейс в стиле DPRAM. Потом появился Philips с моделью 82C200, в котором применялась FIFO–ориентированная модель программирования и ограниченные возможности фильтрации. Для обозначения различия между двумя моделями программирования, люди стали называть способ Intel – Full CAN, а способ Philips – Basic CAN. Сегодня большинство контроллеров CAN поддерживают обе модели программирования, поэтому нет смысла в использовании терминов Full CAN и Basic CAN – фактически, эти термины могут вызвать неразбериху и стоит воздержаться от их употребления.
В действительности, контроллер Full CAN может взаимодействовать с контроллером Basic CAN и наоборот. Проблемы с совместимостью отсутствуют.
Разрешение конфликтов на шине и приоритет сообщения
Разрешение конфликтов сообщений (процесс, в результате которого два или более контроллера CAN решают, кто будет пользоваться шиной) очень важно для определения реальной доступности полосы пропускания для передачи данных.
Любой контроллер CAN может начать передачу, когда обнаружит, что шина простаивает. Это может привести к тому, что два или более контроллеров начнут передачу сообщения (почти) одновременно. Конфликт решается следующим образом. Передающие узлы осуществляют мониторинг шины в процессе отправки сообщения. Если узел обнаруживает доминантный уровень в то время, как сам он отправляет рецессивный уровень, он незамедлительно устранится от процесса разрешения конфликта и станет приемником. Разрешение конфликтов осуществляется по всему полю арбитража, и после того, как это поле отсылается, на шине остается только один передатчик. Данный узел продолжит передачу, если ничего не случится. Остальные потенциальные передатчики попытаются передать свои сообщения позже, когда шина освободится. В процессе разрешения конфликта время не теряется.
Важным условием для благополучного разрешения конфликта является невозможность ситуации, при которой два узла могут передать одинаковое поле арбитража. Из этого правила есть одно исключение: если сообщение не содержит данных, то любой узел может передавать это сообщение.
Поскольку, CAN–шина является шиной с подсоединением устройств по типу «монтажное И» (wired–AND) и доминантный бит (Dominant bit) является логическим 0, следовательно сообщение с самым низким в численном выражении полем арбитража выиграет в разрешении конфликта.
Вопрос: Что произойдет в случае, если единственный узел шины попытается отослать сообщение?
Ответ: Узел, разумеется, выиграет в разрешении конфликта и успешно проведет передачу сообщения. Но когда наступит время распознавания… ни один узел не отправит доминантный бит области распознавания, поэтому передатчик определит ошибку распознавания, пошлет флаг ошибки, повысит значение своего счетчика ошибок передачи на 8 и начнет повторную передачу. Этот цикл повторится 16 раз, затем передатчик перейдет в статус пассивной ошибки. В соответствии со специальным правилом в алгоритме ограничения ошибок, значение счетчика ошибок передачи не будет более повышаться, если узел имеет статус пассивной ошибки и ошибка является ошибкой распознавания. Поэтому узел будет осуществлять передачу вечно, до тех пор, пока кто–нибудь не распознает сообщение.
Адресация и идентификация сообщения
Повторимся, нет ничего страшного в том, что в сообщениях CAN нет точных адресов. Каждый контроллер CAN будет получать весь траффик шины, и при помощи комбинации аппаратных фильтров и ПО, определять – «интересует» его это сообщение, или нет.
Фактически, в протоколе CAN отсутствует понятие адреса сообщения. Вместо этого содержимое сообщения определяется идентификатором, который находится где–то в сообщении. Сообщения CAN можно назвать «контентно–адрессовнными».
Определённый адрес работает так: «Это сообщение для узла X». Контентно–адресованное сообщение можно описать так: «Это сообщение содержит данные с маркировкой X». Разница между этими двумя концепциями мала, но существенна.
Содержимое поле арбитража используется, в соответствии со стандартом, для определения очередности сообщения на шине. Все контроллеры CAN будут также использовать всё (некоторые – только часть) поле арбитража в качестве ключа в процессе аппаратной фильтрации.
Стандарт не говорит, что поле арбитража непременно должно использоваться в качестве идентификатора сообщения. Тем не менее, это очень распространенный вариант использования.
Примечание о значениях идентификатора
Мы говорили, что идентификатору доступны 11 (CAN 2.0A) или 29 (CAN 2.0B) бит. Это не совсем верно. Для совместимости с определенным старым контроллером CAN (угадайте каким?), идентификаторы не должны иметь 7 старших бит установленных в логическую единицу, поэтому 11–битным идентификаторам доступны значения 0..2031, а пользователи 29–битных идентификаторов могут использовать 532676608 различных значений.
Заметьте, что все остальные контроллеры CAN принимают «неправильные» идентификаторы, поэтому в современных системах CAN идентификаторы 2032..2047 могут использоваться без ограничений.
Физические уровни CAN
Шина CAN
Шина CAN использует код без возвращения к нулю (NRZ) с вставкой битов. Существуют два разных состояния сигнала: доминантное (логический 0) и рецессивное (логическая 1). Они соответствуют определенным электрическим уровням, зависящим от используемого физического уровня (их несколько). Модули подключены к шине по схеме «монтажное И» (wired–AND): если хотя бы один узел переводит шину в доминантное состояние, то вся шина находится в этом состоянии, вне зависмости от того, сколько узлов передают рецессивное состояние.
Различные физические уровни
Физический уровень определяет электрические уровни и схему передачи сигналов по шине, полное сопротивление кабеля и т.п.
Существует несколько различных версий физических уровней: Наиболее распространенным является вариант, определенный стандартом CAN, часть ISO 11898–2, и представляющий собой двухпроводную сбалансированную сигнальную схему. Он также иногда называется high–speed CAN.
Другая часть того же стандарта ISO 11898–3 описывает другую двухпроводную сбалансированную сигнальную схему – для менее скоростной шины. Она устойчива к сбоям, поэтому передача сигналов может продолжаться даже в том случае, когда один из проводов будет перерезан, замкнут на «землю» или в состоянии Vbat. Иногда такая схема называется low–speed CAN.
SAE J2411 описывает однопроводной (плюс «земля», разумеется) физический уровень. Он используется в основном в автомобилях – например GM–LAN.
Существуют несколько проприетарных физических уровней.
В былые времена, когда драйверов CAN не существовало, использовались модификации RS485.
Различные физические уровни как правило не могут взаимодействовать между собой. Некоторые комбинации могут работать (или будет казаться, что они работают) в хороших условиях. Например, приемопередатчики high–speed и low–speed могут работать на одной шине лишь иногда.
Абсолютное большинство микросхем приемопередатчиков CAN произведено компанией Philips; в число других производителей входят Bosch, Infineon, Siliconix и Unitrode.
Наиболее распространен приемопередатчик 82C250, в котором реализован физический уровень, описываемый стандартом ISO 11898. Усовершенствованная версия – 82C251.
Распространенный приемопередатчик для «low–speed CAN» – Philips TJA1054.
Максимальная скорость передачи данных по шине
Максимальная скорость передачи данных по шине CAN, в соответствии со стандартом , равна 1 Мбит/с. Однако некоторые контроллеры CAN поддерживают скорости выше 1 Мбит/с и могут быть использованы в специализированных приложениях.
Low–speed CAN (ISO 11898–3, см. выше) работает на скоростях до 125 кбит/с.
Однопроводная шина CAN в стандартном режиме может передавать данные со скоростью порядка 50 кбит/с, а в специальном высокоскоростном режиме, например для программирования ЭБУ (ECU), около 100 кбит/с.
Минимальная скорость передачи данных по шине
Имейте в виду, что некоторые приемопередатчики не позволят вам выбрать скорость ниже определенного значения. Например, при использовании 82C250 или 82C251 вы можете без проблем установить скорость 10 кбит/с, но если вы используете TJA1050, то не сможете установить скорость ниже 50 кбит/с. Сверяйтесь со спецификацией.
Максимальная длина кабеля
При скорости передачи данных 1 Мбит/с, максимальная длина используемого кабеля может составлять порядка 40 метров. Это связано с требованием схемы разрешения конфликтов, согласно которому фронт волны сигнала должен иметь возможность дойти до самого дальнего узла и вернуться назад прежде чем бит будет считан. Иными словами, длина кабеля ограничена скоростью света. Предложения по увеличению скорости света рассматривались, но были отвергнуты в связи с межгалактическими проблемами.
Другие максимальные длины кабеля (значения приблизительные):
100 метров при 500 кбит/с;
200 метров при 250 кбит/с;
500 метров при 125 кбит/с;
6 километров при 10 кбит/с.
Если для обеспечения гальванической изоляции используются оптопары, максимальная длина шины соответственно сокращается. Совет: используйте быстрые оптопары, и смотрите на задержку сигнала в устройстве, а не на максимальную скорость передачи данных в спецификации.
Оконечное прерывание шины
Шина CAN стандарта ISO 11898 должна заканчиваться терминатором. Это достигается путем установки резистора сопротивлением 120 Ом на каждом конце шины. Терминирование служит двум целям:
1. Убрать отражения сигнала на конце шины.
2. Убедиться, что получает корректные уровни постоянного тока (DC).
Шина CAN стандарта ISO 11898 обязательно должна терминироваться вне зависимости от её скорости. Я повторю: шина CAN стандарта ISO 11898 обязательно должна терминироваться вне зависимости от её скорости. Для лабораторной работы может хватить и одного терминатора. Если ваша шина CAN работает даже при отсутствии терминаторов – вы просто счастливчик.
Заметьте, что другие физические уровни , такие как low–speed CAN, однопроводная шина CAN и другие, могут требовать, а могут и не требовать наличия оконечного терминатора шины. Но ваша высокоскоростная шина CAN стандарта ISO 11898 всегда будет требовать наличия хотя бы одного терминатора.
Кабель
Стандарт ISO 11898 предписывает, что волновое сопротивление кабеля номинально должно равнятся 120 Ом, однако допускается интервал значений сопротивления Ом.
Немногие, из присутствующих сегодня на рынке, кабели удовлетворяют этим требованиям. Есть большая вероятность, что интервал значений сопротивления будет расширен в будущем.
ISO 11898 описывает витую пару, экранированную или неэкранированную. Идёт работа над стандартом однопроводного кабеля SAE J2411.
В современных машинах используются электронные блоки управления (ЭБУ, ECU - Electronic Control Unit) для контроля и управления различными системами машины, такими как гидравликой, коробкой передач и двигателем.
Аналогично тому, как компьютеры могут быть соединены в одну сеть, блоки управления в машине тоже можно объединить.
Преимущества сетевого соединения:
- Более чувствительная система управления
- Получение более полных и надежных данных
- Обнаружение неисправностей и управление настройками производится средствами программного обеспечения.
Например, ЭБУ двигателя может обмениваться с другими ЭБУ машины по системе сети CAN .
Система CAN :Controller Area Network - сеть контроллеров. CAN разработан компанией Robert Bosch GmbH в середине 1980-х и в настоящее время получил широкое применение в автомобильной, авиационной, тракторостроительной и других видах промышленности.
Электронная система связи CAN, которая объединяет все блоки управления машиной в сеть с общим кабелем(шиной) и состоящая из одной пары проводов, называется шиной CAN. Закодированные данные посылаются от блоков управления на шину CAN.
Рисунок - CAN шина из 4-х блоков управления.
Выше показана шина CAN, состоящая из 4-х блоков управления. На концах общего кабеля (шины) устанавливается согласующие сопротивления (терминаторы, резисторы) Обычно сопротивление каждого резистора составляет 120 Ом. Применение согласующих резисторов на концах системы позволяет избежать отражение сигнала в конце линии тем самым обеспечивая нормальную работу всей CAN сети.
Передача сигналов в шине CAN осуществляется посредством двух скрученных между собой проводов (витая пара, Twisted Pair) Применение витой пары проводов, обусловлено дифференциальной передачей данных и высокой защитой такого решения от внешних помех.
В нашем случае блок №2 отправляет один сигнал по двум витым проводам в шину CAN, причем у этого сигнала будет различное напряжение на каждом проводе витой пары. Другие блоки в сети читают сигнал и определяют какому блоку оно предназначено и какую команду нужно выполнить (Блоки №1 и №4)
Передача одного и того же сигнала на два провода (CAN High и CAN low) с разным напряжением происходит методом "дифференциальной передачи данных". В состоянии покоя напряжение на проводе CAN High и CAN low составляет 2,5 В. Такое состояние называется "рецессивное" и упрощенно соответствует значению бита "0" При переходе в активное "доминантное" состояние (такое состояние может создать любой элемент сети) напряжение на проводе CAN High будет повышаться не меньше чем на 1 В до 3,5 В, а CAN low понижаться - тоже на 1 В до 1,5В. Чтобы "понимать" разницу напряжений между CAN High и CAN low, каждый блок управления подключается к шине CAN через трансивер, где происходит преобразование разности напряжений U CAN Hi и U CAN Lo в итоговое напряжение U DIFF . Разница между CAN High и CAN low будет 2В и будет восприниматься принимающими блоками управления как значение бита, равное "1". Такая "дифференциальная передача" сигнала, исключает влияние базового напряжения 2,5 В и другие скачки напряжений из-за различных помех на работу блоков управления. Например, происходит просадка напряжения в бортовой сети на 1,5 В из-за включения мощного потребителя в сеть: U CAN Hi и U CAN Lo в состоянии покоя 2,5 -1,5 = 1 В (U DIFF = 1 - 1 = 0 - Значение бита "0") Разница, при переходе в доминантное состояние U CAN Hi = 2,5 +1 -1,5 = 2 В; U CAN Lo =2,5 -1 -1,5 = 0 В. Итого U DIFF = 2 - 0 = 2 В (Значение бита "1"), даже такая нереальная просадка не повлияла на работу.
 Рисунок - Принцип линии CAN
Рисунок - Принцип линии CAN
Так происходит передача сигналов по шине CAN. Сами эти сигналы представляют собой "кадры" (сообщения), которые принимаются всеми элементами сети CAN. Полезная информация в кадре состоит из идентификационного поля (идентификатора) длиной 11 бит (стандартный формат) или 29 бит (расширенный формат, надмножество предыдущего) и поля данных длиной от 0 до 8 байт. Идентификационное поле говрит о содержимом пакета и служит для определения приоритета при попытке одновременной передачи несколькими сетевыми узлами. Также в кадре (сообщении) помимо полезной информации содержится служебная информация. Она представлена полями проверки, полем отзыва и другим полями. В конце кадра содержится "поле конец сообщения"
В шине CAN сообщения от блоков управления должны передаваться в общую шину, то для исключения конфликтов между блоками, каждый узел перед отправкой кадра проверяет сеть на передачу доминантного бита. Устройство передающее доминантный бит считается приоритетным. Таким образом устройство будет дожидаться освобождения линии CAN. С одной стороны такой алгоритм работы повышает быстродействие, но с другой при неправильной работе одного из блоков управления возможна полная "загрузка" CAN шины и невозможность отправки сообщении другими блоками, элементами сети CAN (Линия для них будет всегда занята).

Рисунок -Структура сообщения
Напоследок пример работы:
Переключением кнопки инициируем команду блока управления №1 передачу сообщений в шину CAN. Блок №2 получает сообщение и расшифровав в сообщении что кадр пришел для него с командой включить свет. Подается бортовое напряжение на потребитель.
 Рисунок -
Принцип коммуникации через
CAN
Рисунок -
Принцип коммуникации через
CAN
Вот такой принцип работы шины CAN без конкретных углублений. Также стоит отметить, что шина CAN может иметь свои особенности, зависящее от области применения и фирмы производителя. В статье я рассказал о наиболее часто встречающейся шине CAN, которую можно встретить в современных грузовых и легковых автомобилях, тракторах и разнообразной спец технике.
Современный автомобиль это не только средство передвижения, но и продвинутый гаджет с мультимедийными функциями и электронной системой управления агрегатами и кучей датчиков. Многие автопроизводители предлагают функции ассистентов движения, помощников при парковке, мониторинга и управления авто с телефона. Это возможно благодаря использованию в авто CAN шины к которой подключены все системы: двигатель, тормозная система, руль, мультимедиа, климат и др.
Мой автомобиль Skoda Octavia 2011 г. в. не предлагает возможностей управления с телефона, поэтому я решил исправить этот недостаток, а заодно и добавить функцию голосового управления. В качестве шлюза между CAN шиной и телефоном я использую Raspberry Pi с шилдом CAN BUS и WiFi роутер TP-Link. Протокол общения агрегатов авто закрытый, и на все мои письма предоставить документацию протокола Volkswagen отвечал отказом. Поэтому единственный способ узнать, как общаются устройства в авто и научиться ими управлять является реверс-инжиниринг протокола CAN шины VW.
Я действовал поэтапно:
- Подключение к CAN шине авто
- Голосовое управление с помощью Homekit и Siri
Разработка CAN шилда для Raspberry Pi
Схему шилда взял здесь lnxpps.de/rpie , там же и описание выводов, для общения с CAN используются 2 микросхемы MCP2515 и MCP2551. К шилду подключаются 2 провода CAN-High и CAN-Low. В SprintLayout 6 развел плату, может кому пригодится CANBoardRPi.lay (на заглавном фото прототип шилда на макетке).

Установка ПО для работы с CAN шиной
На Raspbian 2-x годичной давность мне потребовалось пропатчить bcm2708.c, чтобы добавить поддержку CAN (возможно сейчас это не требуется). Для работы с CAN шиной нужно установить пакет утилит can-utils с github.com/linux-can/can-utils , после этого подгрузить модули и поднять can интерфейс: # initialize
insmod spi-bcm2708
insmod can
insmod can-dev
insmod can-raw
insmod can-bcm
insmod mcp251x
# Maerklin Gleisbox (60112 and 60113) uses 250000
# loopback mode for testing
ip link set can0 type can bitrate 125000 loopback on
ifconfig can0 up
Проверяем, что интерфейс CAN поднялся командой ifconfig
:

Проверить, что все работает можно отправив команду и получив ее.
В одном терминале слушаем:
Root@raspberrypi ~ # candump any,0:0,#FFFFFFFF
В другом терминале отправляем:
Root@raspberrypi ~ # cansend can0 123#deadbeef
Более подробный процесс установки описан здесь lnxpps.de/rpie .
Подключение к CAN шине авто
Немного изучив открытую документацию на CAN шину VW я выяснил, что у меня используется 2 шины.Шина CAN силового агрегата , передающая данные со скоростью 500 кбит/с, связывает все обслуживающие этот агрегат блоки управления.
Например, к шине CAN силового агрегата могут быть подключены следующие приборы:
- блок управления двигателем,
- блок управления АБС,
- блок управления системой курсовой стабилизации,
- блок управления коробкой передач,
- блок управления подушками безопасности,
- комбинация приборов.
Например, к шине CAN системы «Комфорт» и информационно<командной системы могут быть
подключены следующие приборы:
- блок управления системой Climatronic или климатической установкой,
- блоки управления в дверях автомобиля,
- блок управления системой «Комфорт»,
- блок управления с дисплеем для радио и навигационной системы.
Обе шины связаны через шлюз, который находится в области под рулем, так же к шлюзу подключен диагностический OBD2 разъем, к сожаление через OBD2 разъем нельзя послушать трафик от обеих шин, можно только передать команду и запросить состояние. Я решил, что буду работать только с шиной «Комфорт» и самым удобным местом подключения к шине оказался разъем в водительской двери.

Теперь я могу слушать, все что происходит в CAN шине «Комфорт» и отправлять команды.
Разработка сниффера и изучение протокола CAN шины

После того как я получил доступ к прослушиванию CAN шины, мне нужно расшифровать кто кому и что передает. Формат пакета CAN показан на рисунке.

Все утилиты из набора can-utils сами умеют разбирать CAN пакеты и отдают только полезную информацию, а именно:
- Идентификатор
- Длина данных
- Данные
Для macOS я написал простое приложение, которое для каждого адреса устройства добавляет ячейку в табличку и в этой ячейке я уже вижу какие данные меняются.

Нажимаю кнопку стеклоподъемника я нашел ячейку в которой меняются данные, затем я и определил какие команды соответствуют нажатию вниз, нажатию вверх, удержанию вверх, удержанию вниз.
Проверить, что команда работает, можно отправив из терминала, например команду поднять левое стекло вверх:
Cansend can0 181#0200
Команды, которые передают устройства по CAN шине в автомобилях VAG (Skoda Octavia 2011), полученные методом реверс-инжиниринг:
// Front Left Glass Up
181#0200
// Front Left Glass Down
181#0800
// Front Right Glass Up
181#2000
// Front Right Glass Down
181#8000
// Back Left Glass Up
181#0002
// Back Left Glass Down
181#0008
// Back Right Glass Up
181#0020
// Back Right Glass Down
181#0080
// Central Lock Open
291#09AA020000
// Central Lock Close
291#0955040000
// Update Light status of central lock (Когда отправляешь команду открыть/закрыть замок то на кнопке управления замком светодиод не изменяет состояние, чтобы он показал реальное состояние центрального замка, нужно отправить команду обновления)
291#0900000000
Мне было лень изучить все остальные устройства, поэтому в этом списке, только то что мне было интересно.
Разработка приложения для телефона
Используя полученные команды я написал приложение для iPhone, которое открывает/закрывает стекла и управляет центральным замком.На Raspberry Pi я запустил 2 маленьких сервера, первый отправляет данные с candump в TCP/IP, второй принимает команды от iPhone и передает их cansend.

Исходники приложения управления авто для iOS
//
// FirstViewController.m
// Car Control
//
// Created by Vitaliy Yurkin on 17.05.15.
// Copyright (c) 2015 Vitaliy Yurkin. All rights reserved.
//
#import "FirstViewController.h"
#import "DataConnection.h"
#import "CommandConnection.h"
@interface FirstViewController ()
Есть способ не писать свое приложение для телефона, а воспользоваться готовым из мира умных домов, всего лишь потребуется установиться на Raspberry Pi систему автоматизации